
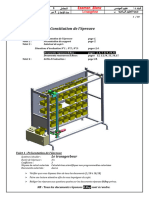
TD Borne Escamotable
TD Borne Escamotable
Vous aimerez peut-être aussi
- Structure Cahier Des ChargesDocument3 pagesStructure Cahier Des ChargesDouae Benabdellah100% (2)
- Examen 2S - Technologie D'électricité 2Document4 pagesExamen 2S - Technologie D'électricité 2EL-AARBAOUI ABDELJALIL100% (1)
- 2FI 15-16 RatDocument4 pages2FI 15-16 RatEl GhafraouiPas encore d'évaluation
- Exams A Faire SIDocument10 pagesExams A Faire SIyassine laouadiPas encore d'évaluation
- 3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Document9 pages3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Anne Talleux VétuPas encore d'évaluation
- 2systeme EncaissageDocument39 pages2systeme Encaissageダークライオン ダークライオンPas encore d'évaluation
- Chaine Dinformation Exercice - TP Introduction ISIS Proteus - MOUANNISSI TCTDocument20 pagesChaine Dinformation Exercice - TP Introduction ISIS Proteus - MOUANNISSI TCTBonasie LumbalaPas encore d'évaluation
- Bac Transbergeur - CPDFDocument18 pagesBac Transbergeur - CPDFElmostafa AchibanePas encore d'évaluation
- Examen Si SMB 2015 Session Normale SujetDocument21 pagesExamen Si SMB 2015 Session Normale Sujetkira7Pas encore d'évaluation
- BAC TRANSBERGEUR - CPDFDocument18 pagesBAC TRANSBERGEUR - CPDFachibane1965Pas encore d'évaluation
- Devoir 2 Modele 1 Si 2 Bac SM B Semestre 2Document21 pagesDevoir 2 Modele 1 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- Exam PrincipalDocument19 pagesExam PrincipalAymane AbdenourPas encore d'évaluation
- 2FI 16-17 RatDocument3 pages2FI 16-17 RatEl GhafraouiPas encore d'évaluation
- BAC 2015 Sciences de Lingénieur SMBDocument21 pagesBAC 2015 Sciences de Lingénieur SMBfatima zahraPas encore d'évaluation
- Sujet 0Document13 pagesSujet 0YoussefPas encore d'évaluation
- Bts Snec 2021 Me 1 SujetDocument44 pagesBts Snec 2021 Me 1 SujetkrommPas encore d'évaluation
- TP Pabx 2Document9 pagesTP Pabx 2fabPas encore d'évaluation
- Sujet GETportesbusDocument21 pagesSujet GETportesbuskalomboPas encore d'évaluation
- 2013 N KkkoDocument19 pages2013 N Kkkositescompte4Pas encore d'évaluation
- Examens National 2bac Sci Genieur SMB 2012 R PDFDocument27 pagesExamens National 2bac Sci Genieur SMB 2012 R PDFHanane TounsiPas encore d'évaluation
- Porte AutomatiseeDocument42 pagesPorte AutomatiseeAbderrazak MiassarPas encore d'évaluation
- Lab 1Document9 pagesLab 1Wissem BachaPas encore d'évaluation
- Bts Snec 2021Document44 pagesBts Snec 2021Odile StilePas encore d'évaluation
- SI SMB Rtpage 2018Document17 pagesSI SMB Rtpage 2018BOUALAOUIPas encore d'évaluation
- Examen API&SupervisionDocument4 pagesExamen API&SupervisionSoufien Atoui67% (3)
- DNB Blanc Voiture Autonome SUJETDocument2 pagesDNB Blanc Voiture Autonome SUJETNicolas PailhèsPas encore d'évaluation
- TP ElecII GM2 PDFDocument21 pagesTP ElecII GM2 PDFyoussef MoujanniPas encore d'évaluation
- Sujet - Lève Personne - ÉlèveDocument10 pagesSujet - Lève Personne - ÉlèveremivsnPas encore d'évaluation
- Transp DistriDocument18 pagesTransp DistriloustnisPas encore d'évaluation
- TP N°2 - Mise en Oueuvre D APIDocument4 pagesTP N°2 - Mise en Oueuvre D APIlange681Pas encore d'évaluation
- Grafcet Et APIDocument14 pagesGrafcet Et APInezha wassafrar100% (1)
- Devoir 2 Modele 1 Si 2 Bac SM B Semestre 1Document18 pagesDevoir 2 Modele 1 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- TP1 AutomatiqueDiscrete MAI YAODocument8 pagesTP1 AutomatiqueDiscrete MAI YAOMai Anh ThưPas encore d'évaluation
- BAC SI SMB Rattr 2023Document17 pagesBAC SI SMB Rattr 2023AhmedPas encore d'évaluation
- TP Informatique IndustrielleDocument27 pagesTP Informatique IndustrielleAkram Ferchichi100% (2)
- Baccalaureat 2005Document32 pagesBaccalaureat 2005Mohammed reda HadiPas encore d'évaluation
- BrevetDocument2 pagesBrevetrenePas encore d'évaluation
- Logiciel de Simulation Électrique (Schémaplic) PDFDocument8 pagesLogiciel de Simulation Électrique (Schémaplic) PDFNabilBouabanaPas encore d'évaluation
- Energie Hydraulique D'une Nano CentraleDocument4 pagesEnergie Hydraulique D'une Nano CentraleRégis ESCOBARPas encore d'évaluation
- X DDCDDVFVDocument14 pagesX DDCDDVFVAdinko lo djonPas encore d'évaluation
- Sujet AII 2003Document18 pagesSujet AII 2003Kouki JihedPas encore d'évaluation
- Atv 31Document11 pagesAtv 31ia2e techPas encore d'évaluation
- Api G2Document9 pagesApi G2Sissoko FakourouPas encore d'évaluation
- 08-09 ATI2 CM TP Cinematique-III Faac PDFDocument7 pages08-09 ATI2 CM TP Cinematique-III Faac PDFZaafoury WassimPas encore d'évaluation
- Automatismes Exercices TDs Ordi PDFDocument49 pagesAutomatismes Exercices TDs Ordi PDFkwamo emilePas encore d'évaluation
- Devoir AutomatismesDocument3 pagesDevoir AutomatismesBodelvi KayiPas encore d'évaluation
- Faac GrafcetDocument6 pagesFaac GrafcetMikaPas encore d'évaluation
- Rapport: Multplixing 7 SegmentDocument17 pagesRapport: Multplixing 7 SegmentZayNabPas encore d'évaluation
- L Architecture MultiplexeDocument6 pagesL Architecture Multiplexeanass sbniPas encore d'évaluation
- Sujet 1578Document51 pagesSujet 1578ELmokhtar HamrouniPas encore d'évaluation
- Partie 1Document9 pagesPartie 1victor.cisloniePas encore d'évaluation
- Module 1 TDDocument6 pagesModule 1 TDyeosus676Pas encore d'évaluation
- ENDocument8 pagesENsihamPas encore d'évaluation
- 5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1Document58 pages5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1ademgassoumikiaPas encore d'évaluation
- SYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFDocument40 pagesSYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFJawher Salem50% (2)
- Variante 7Document4 pagesVariante 7Mihiãr Đ'ałemBèrtPas encore d'évaluation
- Série 3Document38 pagesSérie 3Jamila DebayaPas encore d'évaluation
- Wahid DerouicheDocument27 pagesWahid DerouicheNâs RôPas encore d'évaluation
- Etude Est Un ConvoyeurDocument20 pagesEtude Est Un ConvoyeurPeralta AdrianoPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- Environnement MatérielDocument5 pagesEnvironnement MatérielSaid Sunghour Sunghour100% (1)
- Devoir de Contrôle N°1 2ème D7Document2 pagesDevoir de Contrôle N°1 2ème D7Jridette Walid100% (2)
- Tout Sur Gmail 110622084939 Phpapp02 PDFDocument114 pagesTout Sur Gmail 110622084939 Phpapp02 PDFSaidi JalelPas encore d'évaluation
- SkanTicket Tickets 1630265244335 PDFDocument4 pagesSkanTicket Tickets 1630265244335 PDF冰øsirūs冰Pas encore d'évaluation
- Note de Calcul Dimensionnement M Canique D Un Conduite 1709530151Document7 pagesNote de Calcul Dimensionnement M Canique D Un Conduite 1709530151I'hsen ElmayPas encore d'évaluation
- Injecteurs Piezo ElectriquesDocument2 pagesInjecteurs Piezo ElectriquesSofiane HalimiPas encore d'évaluation
- 802371.F - Dtecteur de Fume Optique Interactif IQ8Quad ODocument1 page802371.F - Dtecteur de Fume Optique Interactif IQ8Quad ONj AchrafPas encore d'évaluation
- Chap1 Introduction Aux Réseaux InformatiquesDocument63 pagesChap1 Introduction Aux Réseaux InformatiquesDöūãe OđPas encore d'évaluation
- Cours02 1Document10 pagesCours02 1milla labrunePas encore d'évaluation
- Intelligence Artificielle - WikipédiaDocument230 pagesIntelligence Artificielle - Wikipédiadboubacarbiro14Pas encore d'évaluation
- OnduleeurDocument7 pagesOnduleeurابراهيم اليوسفيPas encore d'évaluation
- TP HacheurDocument5 pagesTP HacheurKano100% (1)
- Realisation D'un Site Web Dynamique CommercialeDocument30 pagesRealisation D'un Site Web Dynamique CommercialeOmar Sabir100% (1)
- Comment Contruire Votre Tableau de Bord de Pilotage Avec Micosoft Excel PDFDocument99 pagesComment Contruire Votre Tableau de Bord de Pilotage Avec Micosoft Excel PDFArnold KamgaPas encore d'évaluation
- Cours Multimedia 1Document18 pagesCours Multimedia 1Amel RhahliaPas encore d'évaluation
- Support de Cours BUREAUTIQUE - IC3/GS4 CHAPITRE 3Document20 pagesSupport de Cours BUREAUTIQUE - IC3/GS4 CHAPITRE 3Franck PandwePas encore d'évaluation
- Hizib Nashr Imam Al Haddad - PDFDocument9 pagesHizib Nashr Imam Al Haddad - PDFBilal HamadaPas encore d'évaluation
- Mode de Réinitialisation Des Bits (BSR) 2. Mode Entrée/sortie (E/S)Document3 pagesMode de Réinitialisation Des Bits (BSR) 2. Mode Entrée/sortie (E/S)Yogbake Hans100% (1)
- contentdownload1712382202414version2fileVersion-Light-PDF Global Integrale Second Oeuvre 2020 Avec A 2Document472 pagescontentdownload1712382202414version2fileVersion-Light-PDF Global Integrale Second Oeuvre 2020 Avec A 2jordan bulteelPas encore d'évaluation
- Hipath 3000 ManDocument1 220 pagesHipath 3000 ManbentamraPas encore d'évaluation
- OpenScape Business V1 Documentation Administrateur Edition 26Document1 669 pagesOpenScape Business V1 Documentation Administrateur Edition 26CSIOPas encore d'évaluation
- 20mint BDDocument24 pages20mint BDCil VinPas encore d'évaluation
- Télécharger Cours de Dactylographie Gratuit À Télécharger Cours de Dactylographie Pdfdactylographie oDocument10 pagesTélécharger Cours de Dactylographie Gratuit À Télécharger Cours de Dactylographie Pdfdactylographie oGabriel Alonso100% (1)
- ZAC1Document21 pagesZAC1MpangaPas encore d'évaluation
- Chapitre 2 Gestion de Projet E-Commerce (Mode de Compatibilité)Document17 pagesChapitre 2 Gestion de Projet E-Commerce (Mode de Compatibilité)Hajar Ez-zanguiPas encore d'évaluation
- LBL CC3 INFO 3eDocument2 pagesLBL CC3 INFO 3eThē Nøvātør SystēmēPas encore d'évaluation
- Chapitre 4 La NormalisationDocument11 pagesChapitre 4 La Normalisationtchankou nyamsiPas encore d'évaluation
- LED 001 Octobre1982Document58 pagesLED 001 Octobre1982Laurentiu DraganPas encore d'évaluation
- Zenitel TCIS C1 1008111901Document6 pagesZenitel TCIS C1 1008111901SODEX FRANCEPas encore d'évaluation
























































































Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Structure Cahier Des ChargesDocument3 pagesStructure Cahier Des ChargesDouae Benabdellah100% (2)
- Examen 2S - Technologie D'électricité 2Document4 pagesExamen 2S - Technologie D'électricité 2EL-AARBAOUI ABDELJALIL100% (1)
- 2FI 15-16 RatDocument4 pages2FI 15-16 RatEl GhafraouiPas encore d'évaluation
- Exams A Faire SIDocument10 pagesExams A Faire SIyassine laouadiPas encore d'évaluation
- 3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Document9 pages3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Anne Talleux VétuPas encore d'évaluation
- 2systeme EncaissageDocument39 pages2systeme Encaissageダークライオン ダークライオンPas encore d'évaluation
- Chaine Dinformation Exercice - TP Introduction ISIS Proteus - MOUANNISSI TCTDocument20 pagesChaine Dinformation Exercice - TP Introduction ISIS Proteus - MOUANNISSI TCTBonasie LumbalaPas encore d'évaluation
- Bac Transbergeur - CPDFDocument18 pagesBac Transbergeur - CPDFElmostafa AchibanePas encore d'évaluation
- Examen Si SMB 2015 Session Normale SujetDocument21 pagesExamen Si SMB 2015 Session Normale Sujetkira7Pas encore d'évaluation
- BAC TRANSBERGEUR - CPDFDocument18 pagesBAC TRANSBERGEUR - CPDFachibane1965Pas encore d'évaluation
- Devoir 2 Modele 1 Si 2 Bac SM B Semestre 2Document21 pagesDevoir 2 Modele 1 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- Exam PrincipalDocument19 pagesExam PrincipalAymane AbdenourPas encore d'évaluation
- 2FI 16-17 RatDocument3 pages2FI 16-17 RatEl GhafraouiPas encore d'évaluation
- BAC 2015 Sciences de Lingénieur SMBDocument21 pagesBAC 2015 Sciences de Lingénieur SMBfatima zahraPas encore d'évaluation
- Sujet 0Document13 pagesSujet 0YoussefPas encore d'évaluation
- Bts Snec 2021 Me 1 SujetDocument44 pagesBts Snec 2021 Me 1 SujetkrommPas encore d'évaluation
- TP Pabx 2Document9 pagesTP Pabx 2fabPas encore d'évaluation
- Sujet GETportesbusDocument21 pagesSujet GETportesbuskalomboPas encore d'évaluation
- 2013 N KkkoDocument19 pages2013 N Kkkositescompte4Pas encore d'évaluation
- Examens National 2bac Sci Genieur SMB 2012 R PDFDocument27 pagesExamens National 2bac Sci Genieur SMB 2012 R PDFHanane TounsiPas encore d'évaluation
- Porte AutomatiseeDocument42 pagesPorte AutomatiseeAbderrazak MiassarPas encore d'évaluation
- Lab 1Document9 pagesLab 1Wissem BachaPas encore d'évaluation
- Bts Snec 2021Document44 pagesBts Snec 2021Odile StilePas encore d'évaluation
- SI SMB Rtpage 2018Document17 pagesSI SMB Rtpage 2018BOUALAOUIPas encore d'évaluation
- Examen API&SupervisionDocument4 pagesExamen API&SupervisionSoufien Atoui67% (3)
- DNB Blanc Voiture Autonome SUJETDocument2 pagesDNB Blanc Voiture Autonome SUJETNicolas PailhèsPas encore d'évaluation
- TP ElecII GM2 PDFDocument21 pagesTP ElecII GM2 PDFyoussef MoujanniPas encore d'évaluation
- Sujet - Lève Personne - ÉlèveDocument10 pagesSujet - Lève Personne - ÉlèveremivsnPas encore d'évaluation
- Transp DistriDocument18 pagesTransp DistriloustnisPas encore d'évaluation
- TP N°2 - Mise en Oueuvre D APIDocument4 pagesTP N°2 - Mise en Oueuvre D APIlange681Pas encore d'évaluation
- Grafcet Et APIDocument14 pagesGrafcet Et APInezha wassafrar100% (1)
- Devoir 2 Modele 1 Si 2 Bac SM B Semestre 1Document18 pagesDevoir 2 Modele 1 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- TP1 AutomatiqueDiscrete MAI YAODocument8 pagesTP1 AutomatiqueDiscrete MAI YAOMai Anh ThưPas encore d'évaluation
- BAC SI SMB Rattr 2023Document17 pagesBAC SI SMB Rattr 2023AhmedPas encore d'évaluation
- TP Informatique IndustrielleDocument27 pagesTP Informatique IndustrielleAkram Ferchichi100% (2)
- Baccalaureat 2005Document32 pagesBaccalaureat 2005Mohammed reda HadiPas encore d'évaluation
- BrevetDocument2 pagesBrevetrenePas encore d'évaluation
- Logiciel de Simulation Électrique (Schémaplic) PDFDocument8 pagesLogiciel de Simulation Électrique (Schémaplic) PDFNabilBouabanaPas encore d'évaluation
- Energie Hydraulique D'une Nano CentraleDocument4 pagesEnergie Hydraulique D'une Nano CentraleRégis ESCOBARPas encore d'évaluation
- X DDCDDVFVDocument14 pagesX DDCDDVFVAdinko lo djonPas encore d'évaluation
- Sujet AII 2003Document18 pagesSujet AII 2003Kouki JihedPas encore d'évaluation
- Atv 31Document11 pagesAtv 31ia2e techPas encore d'évaluation
- Api G2Document9 pagesApi G2Sissoko FakourouPas encore d'évaluation
- 08-09 ATI2 CM TP Cinematique-III Faac PDFDocument7 pages08-09 ATI2 CM TP Cinematique-III Faac PDFZaafoury WassimPas encore d'évaluation
- Automatismes Exercices TDs Ordi PDFDocument49 pagesAutomatismes Exercices TDs Ordi PDFkwamo emilePas encore d'évaluation
- Devoir AutomatismesDocument3 pagesDevoir AutomatismesBodelvi KayiPas encore d'évaluation
- Faac GrafcetDocument6 pagesFaac GrafcetMikaPas encore d'évaluation
- Rapport: Multplixing 7 SegmentDocument17 pagesRapport: Multplixing 7 SegmentZayNabPas encore d'évaluation
- L Architecture MultiplexeDocument6 pagesL Architecture Multiplexeanass sbniPas encore d'évaluation
- Sujet 1578Document51 pagesSujet 1578ELmokhtar HamrouniPas encore d'évaluation
- Partie 1Document9 pagesPartie 1victor.cisloniePas encore d'évaluation
- Module 1 TDDocument6 pagesModule 1 TDyeosus676Pas encore d'évaluation
- ENDocument8 pagesENsihamPas encore d'évaluation
- 5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1Document58 pages5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1ademgassoumikiaPas encore d'évaluation
- SYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFDocument40 pagesSYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFJawher Salem50% (2)
- Variante 7Document4 pagesVariante 7Mihiãr Đ'ałemBèrtPas encore d'évaluation
- Série 3Document38 pagesSérie 3Jamila DebayaPas encore d'évaluation
- Wahid DerouicheDocument27 pagesWahid DerouicheNâs RôPas encore d'évaluation
- Etude Est Un ConvoyeurDocument20 pagesEtude Est Un ConvoyeurPeralta AdrianoPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- Environnement MatérielDocument5 pagesEnvironnement MatérielSaid Sunghour Sunghour100% (1)
- Devoir de Contrôle N°1 2ème D7Document2 pagesDevoir de Contrôle N°1 2ème D7Jridette Walid100% (2)
- Tout Sur Gmail 110622084939 Phpapp02 PDFDocument114 pagesTout Sur Gmail 110622084939 Phpapp02 PDFSaidi JalelPas encore d'évaluation
- SkanTicket Tickets 1630265244335 PDFDocument4 pagesSkanTicket Tickets 1630265244335 PDF冰øsirūs冰Pas encore d'évaluation
- Note de Calcul Dimensionnement M Canique D Un Conduite 1709530151Document7 pagesNote de Calcul Dimensionnement M Canique D Un Conduite 1709530151I'hsen ElmayPas encore d'évaluation
- Injecteurs Piezo ElectriquesDocument2 pagesInjecteurs Piezo ElectriquesSofiane HalimiPas encore d'évaluation
- 802371.F - Dtecteur de Fume Optique Interactif IQ8Quad ODocument1 page802371.F - Dtecteur de Fume Optique Interactif IQ8Quad ONj AchrafPas encore d'évaluation
- Chap1 Introduction Aux Réseaux InformatiquesDocument63 pagesChap1 Introduction Aux Réseaux InformatiquesDöūãe OđPas encore d'évaluation
- Cours02 1Document10 pagesCours02 1milla labrunePas encore d'évaluation
- Intelligence Artificielle - WikipédiaDocument230 pagesIntelligence Artificielle - Wikipédiadboubacarbiro14Pas encore d'évaluation
- OnduleeurDocument7 pagesOnduleeurابراهيم اليوسفيPas encore d'évaluation
- TP HacheurDocument5 pagesTP HacheurKano100% (1)
- Realisation D'un Site Web Dynamique CommercialeDocument30 pagesRealisation D'un Site Web Dynamique CommercialeOmar Sabir100% (1)
- Comment Contruire Votre Tableau de Bord de Pilotage Avec Micosoft Excel PDFDocument99 pagesComment Contruire Votre Tableau de Bord de Pilotage Avec Micosoft Excel PDFArnold KamgaPas encore d'évaluation
- Cours Multimedia 1Document18 pagesCours Multimedia 1Amel RhahliaPas encore d'évaluation
- Support de Cours BUREAUTIQUE - IC3/GS4 CHAPITRE 3Document20 pagesSupport de Cours BUREAUTIQUE - IC3/GS4 CHAPITRE 3Franck PandwePas encore d'évaluation
- Hizib Nashr Imam Al Haddad - PDFDocument9 pagesHizib Nashr Imam Al Haddad - PDFBilal HamadaPas encore d'évaluation
- Mode de Réinitialisation Des Bits (BSR) 2. Mode Entrée/sortie (E/S)Document3 pagesMode de Réinitialisation Des Bits (BSR) 2. Mode Entrée/sortie (E/S)Yogbake Hans100% (1)
- contentdownload1712382202414version2fileVersion-Light-PDF Global Integrale Second Oeuvre 2020 Avec A 2Document472 pagescontentdownload1712382202414version2fileVersion-Light-PDF Global Integrale Second Oeuvre 2020 Avec A 2jordan bulteelPas encore d'évaluation
- Hipath 3000 ManDocument1 220 pagesHipath 3000 ManbentamraPas encore d'évaluation
- OpenScape Business V1 Documentation Administrateur Edition 26Document1 669 pagesOpenScape Business V1 Documentation Administrateur Edition 26CSIOPas encore d'évaluation
- 20mint BDDocument24 pages20mint BDCil VinPas encore d'évaluation
- Télécharger Cours de Dactylographie Gratuit À Télécharger Cours de Dactylographie Pdfdactylographie oDocument10 pagesTélécharger Cours de Dactylographie Gratuit À Télécharger Cours de Dactylographie Pdfdactylographie oGabriel Alonso100% (1)
- ZAC1Document21 pagesZAC1MpangaPas encore d'évaluation
- Chapitre 2 Gestion de Projet E-Commerce (Mode de Compatibilité)Document17 pagesChapitre 2 Gestion de Projet E-Commerce (Mode de Compatibilité)Hajar Ez-zanguiPas encore d'évaluation
- LBL CC3 INFO 3eDocument2 pagesLBL CC3 INFO 3eThē Nøvātør SystēmēPas encore d'évaluation
- Chapitre 4 La NormalisationDocument11 pagesChapitre 4 La Normalisationtchankou nyamsiPas encore d'évaluation
- LED 001 Octobre1982Document58 pagesLED 001 Octobre1982Laurentiu DraganPas encore d'évaluation
- Zenitel TCIS C1 1008111901Document6 pagesZenitel TCIS C1 1008111901SODEX FRANCEPas encore d'évaluation