Vous aimerez peut-être aussi
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Cao VHDL Mpse PDFDocument99 pagesCao VHDL Mpse PDFInes HattabPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Ec Gim334 - Dao - CaoDocument47 pagesEc Gim334 - Dao - CaoArmand EssPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Traiter 2 SteDocument50 pagesTraiter 2 SteFadwa GHANIPas encore d'évaluation
- C Avancé 2022Document178 pagesC Avancé 2022Hamza El mamounPas encore d'évaluation
- Cours PicDocument44 pagesCours PicEmericLebratPas encore d'évaluation
- Chapitre 3 - Automate Programmable ApiDocument15 pagesChapitre 3 - Automate Programmable ApiMohamed TebriPas encore d'évaluation
- TPDocument32 pagesTPKain Chi BlanPas encore d'évaluation
- Un Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseurDocument9 pagesUn Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseuromarPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 51Document18 pagesCours Microcontrôleur Microprocesseur 51NasriMohsenPas encore d'évaluation
- Rappelle ArduinoDocument42 pagesRappelle ArduinosanadPas encore d'évaluation
- Cours - Microcontroleur - PIC-16F887 - 2018 - 2019 VFDocument316 pagesCours - Microcontroleur - PIC-16F887 - 2018 - 2019 VFoassarikhiPas encore d'évaluation
- Cours PICDocument5 pagesCours PICTouta MedPas encore d'évaluation
- Cours APIDocument49 pagesCours APIJoseph Amond100% (1)
- Cours SM en Ligne-ConvertiDocument72 pagesCours SM en Ligne-ConvertiAnfel CPas encore d'évaluation
- Compte Rendu Mooc Semaine 2Document4 pagesCompte Rendu Mooc Semaine 2TanankemPas encore d'évaluation
- Systeme A Microprocesseur - BeddouriDocument69 pagesSysteme A Microprocesseur - BeddouriAchraf RossoneriPas encore d'évaluation
- TP Initiation Langage C Avec PICDocument11 pagesTP Initiation Langage C Avec PICLam NovoxPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurAngélica DEKEPas encore d'évaluation
- Microprocesseurs ATMEL Part2Document10 pagesMicroprocesseurs ATMEL Part2Mustapha ramziPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurCrypto Sylvain100% (1)
- Chapitre II (Microcontrolleurs)Document28 pagesChapitre II (Microcontrolleurs)Rayene RinaPas encore d'évaluation
- 1774853Document32 pages1774853meryemPas encore d'évaluation
- Travaux Pratiques - Microprocesseurs Microcontrôleurs PDFDocument13 pagesTravaux Pratiques - Microprocesseurs Microcontrôleurs PDFGoufi Aouf0% (1)
- Chapitre 4Document37 pagesChapitre 4Ahmed JguirimPas encore d'évaluation
- Chapitre4 Architecture TMS320c6713DSKDocument7 pagesChapitre4 Architecture TMS320c6713DSKBennis MeryemPas encore d'évaluation
- Cours Emi Micro 2020 (Microp CHP 1,2,3)Document15 pagesCours Emi Micro 2020 (Microp CHP 1,2,3)Youssef El AjraouiPas encore d'évaluation
- Introduction Aux Systèmes À Base de MicrocontroleursDocument3 pagesIntroduction Aux Systèmes À Base de Microcontroleursdubonson30Pas encore d'évaluation
- Cours PDFDocument149 pagesCours PDFKnowlegde2016Pas encore d'évaluation
- Ours Système Embarqué Et Système D Exploitation Mobile: Ikbel Daly BrikiDocument52 pagesOurs Système Embarqué Et Système D Exploitation Mobile: Ikbel Daly BrikiGabbianimarcoPas encore d'évaluation
- Chapitre 3. API L2 AutoDocument13 pagesChapitre 3. API L2 Autoأيمن بوهراوةPas encore d'évaluation
- SOCIIA5 Hamdi PDFDocument129 pagesSOCIIA5 Hamdi PDFAymen RakroukiPas encore d'évaluation
- Cours API L3Document46 pagesCours API L3Badiel MarcPas encore d'évaluation
- Pic 16F84 2Document40 pagesPic 16F84 2felkirPas encore d'évaluation
- MCU_1_IntroductionDocument10 pagesMCU_1_IntroductionrlekcirPas encore d'évaluation
- Chapitre 1Document45 pagesChapitre 1moumnimeryem2002Pas encore d'évaluation
- B PIC16F877Document35 pagesB PIC16F877KhonashPas encore d'évaluation
- COURS ImsetDocument17 pagesCOURS ImsetSkander Ben OthmenPas encore d'évaluation
- Microcontroleur CompressDocument78 pagesMicrocontroleur CompressFrank EffeuzePas encore d'évaluation
- Chapitre 2Document14 pagesChapitre 2haroun haPas encore d'évaluation
- CHAPITRE 1 - GéneralitésDocument9 pagesCHAPITRE 1 - GéneralitésZERARKA Mohamed FawziPas encore d'évaluation
- GPIODocument25 pagesGPIOibrahimelbahnsiPas encore d'évaluation
- Ours Système Embarqué Et Système D Exploitation MobileDocument42 pagesOurs Système Embarqué Et Système D Exploitation MobileBoutique GossypiumPas encore d'évaluation
- Introduction À LembarquéDocument82 pagesIntroduction À LembarquéSamira cherifPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 31Document48 pagesCours Microcontrôleur Microprocesseur 31RUBIN MOUDIE100% (1)
- Chapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCDocument22 pagesChapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCMohammed Amdjed DjebliPas encore d'évaluation
- Microsoft PowerPoint - Cours de PIC GénéralitésDocument17 pagesMicrosoft PowerPoint - Cours de PIC GénéralitésNor AlhoudaPas encore d'évaluation
- Projet1 Système de Diagnostic Automobile IntelligentDocument11 pagesProjet1 Système de Diagnostic Automobile IntelligentAhmed JguirimPas encore d'évaluation
- Poly TPDocument14 pagesPoly TPIma AutPas encore d'évaluation
- Chapitre V MicroprocesseurDocument10 pagesChapitre V MicroprocesseurMouhamed MoustaphaPas encore d'évaluation
- Cours Info Indus 1ere PartieDocument69 pagesCours Info Indus 1ere PartieMajda MajdaPas encore d'évaluation
- Support Cours Asi IdaDocument78 pagesSupport Cours Asi Idaoboumou100% (2)
- Automate Programmable IndustrielDocument17 pagesAutomate Programmable IndustrielHassen BrahimPas encore d'évaluation
- Cours de PIC Généralités PDFDocument18 pagesCours de PIC Généralités PDFAhmed FeradjiPas encore d'évaluation
- COURS Pic PDFDocument22 pagesCOURS Pic PDFinstru MentationPas encore d'évaluation
- Info Indus L2S3 2023 24Document84 pagesInfo Indus L2S3 2023 24justicedark6Pas encore d'évaluation
- Chapitre II-nourDocument17 pagesChapitre II-nourbelazouguiPas encore d'évaluation
- Red Ac Microcon TR Ô LeurDocument6 pagesRed Ac Microcon TR Ô LeurSylvain NomenjanaharyPas encore d'évaluation
- Rapport D StageDocument27 pagesRapport D Stageotman46otmanPas encore d'évaluation
- La Fibre OptiqueDocument53 pagesLa Fibre Optiqueهشام درياس100% (4)
- Presentation Systeme Embarqué 4Document20 pagesPresentation Systeme Embarqué 4otman46otmanPas encore d'évaluation
- Cellule SolaireDocument20 pagesCellule Solaireotman46otmanPas encore d'évaluation
- Presentation Systeme Embarqué 4Document20 pagesPresentation Systeme Embarqué 4otman46otmanPas encore d'évaluation
- Série de TD N°3-PCDEEDocument6 pagesSérie de TD N°3-PCDEEHAROPas encore d'évaluation
- Optronique 05 Exposés Combinés L3 MPISDocument81 pagesOptronique 05 Exposés Combinés L3 MPISotman46otmanPas encore d'évaluation
- 2018 Sujet Epreuve Ecrite Concours Externe Infrastructures ReseauxDocument18 pages2018 Sujet Epreuve Ecrite Concours Externe Infrastructures Reseauxsiwar melyenePas encore d'évaluation
- Groupe Testeur Professionnel de Jeux VidéosDocument14 pagesGroupe Testeur Professionnel de Jeux VidéosMenara SAMAROBRIVAPas encore d'évaluation
- 19083 MP tp1 ٣Document6 pages19083 MP tp1 ٣Toutou KHATRIPas encore d'évaluation
- Réalisation D'un Onduleur de Tension Triphasé À Base d'IGBT: DR: Bouzzidi RiadDocument51 pagesRéalisation D'un Onduleur de Tension Triphasé À Base d'IGBT: DR: Bouzzidi RiadTontepambo TheriePas encore d'évaluation
- Cours SPIDocument15 pagesCours SPIMarwen SellamiPas encore d'évaluation
- FR 090914 150215 ME 6vpS5rDocument2 pagesFR 090914 150215 ME 6vpS5rEssaid AjanaPas encore d'évaluation
- Cours Partie 2Document81 pagesCours Partie 2Benbella DjeltiPas encore d'évaluation
- Chapitre 1 - Introduction À LinformatiqueDocument15 pagesChapitre 1 - Introduction À LinformatiqueKABORE PAUL FABRICEPas encore d'évaluation
- Bascule RSDocument3 pagesBascule RSAbdou MbowPas encore d'évaluation
- Reseau Local1Document4 pagesReseau Local1Kouam ChekamPas encore d'évaluation
- ds1 Ge Gim 2020 DDocument1 pageds1 Ge Gim 2020 Ddriss chakdaliPas encore d'évaluation
- Controle Surveillé TCLSH-TCSFDocument1 pageControle Surveillé TCLSH-TCSFOMAR IKENPas encore d'évaluation
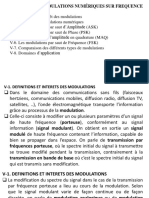
- Techniques Et Supports de Transmission Chapitre5 Modulation Numérique Sur Fréquence PorteuseDocument41 pagesTechniques Et Supports de Transmission Chapitre5 Modulation Numérique Sur Fréquence PorteuseClaude NyamsiPas encore d'évaluation
- Null PDFDocument5 pagesNull PDFFabrice FotsoPas encore d'évaluation
- Workshop ArduinoDocument21 pagesWorkshop Arduinobob2985476Pas encore d'évaluation
- Id 10668Document8 pagesId 10668COL-labPas encore d'évaluation
- Protocole SPIDocument2 pagesProtocole SPINothaßan BerryPas encore d'évaluation
- Fiches Tarifaires CanalDocument13 pagesFiches Tarifaires CanalErick FotsinyPas encore d'évaluation
- TP1 TV2023Document8 pagesTP1 TV2023Dehri BrahimPas encore d'évaluation
- 0 - Etat Initial RAC-23-J61NPPXB06Document12 pages0 - Etat Initial RAC-23-J61NPPXB06yannic bouttierPas encore d'évaluation
- Partiel 2016 CorrigéDocument12 pagesPartiel 2016 Corrigémaurice audin100% (1)
- Conception Hierarchiques D'un RéseauDocument7 pagesConception Hierarchiques D'un RéseauMouhamed sarrPas encore d'évaluation
- DMNG-PRO180 v2.6 Manuel Utilisation Revl FR PDFDocument54 pagesDMNG-PRO180 v2.6 Manuel Utilisation Revl FR PDFAbderrahmen LotfiPas encore d'évaluation
- TD4 - Liaison de Données - Correction PDFDocument5 pagesTD4 - Liaison de Données - Correction PDFLinda ZaafraniPas encore d'évaluation
- Evolution Des Réseaux Et Systémes L3 Télécoms v2Document2 pagesEvolution Des Réseaux Et Systémes L3 Télécoms v2Voundai Mahamat ValamdouPas encore d'évaluation
- Informatique Projet TaoutaouDocument4 pagesInformatique Projet TaoutaouOussa MaPas encore d'évaluation
- Local Media1101029635307551998Document14 pagesLocal Media1101029635307551998Djam's100% (1)
- Etude Et Simulation D Une Chaine de Transmission Pour Un Debit de 40 Gbits PDFDocument120 pagesEtude Et Simulation D Une Chaine de Transmission Pour Un Debit de 40 Gbits PDFzizo zezzoPas encore d'évaluation
- 5-Inch Screen For Arduino (Hackable Magazine 4 Janv-Fév 2015)Document6 pages5-Inch Screen For Arduino (Hackable Magazine 4 Janv-Fév 2015)Der LudditusPas encore d'évaluation
- Besoin en Materiels Informatiques Actualiser 2023Document4 pagesBesoin en Materiels Informatiques Actualiser 2023ibrahima sory camaraPas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Le trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsD'EverandLe trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)