Vous aimerez peut-être aussi
- Exercice Equiprojectivit Pompe Ptrole EnoncDocument3 pagesExercice Equiprojectivit Pompe Ptrole Enoncspectrum660% (1)
- Exercice Equiprojectivit Machine Crire LveDocument3 pagesExercice Equiprojectivit Machine Crire Lvespectrum66Pas encore d'évaluation
- Exercice Equiprojectivit Pompe Ptrole CorrigDocument2 pagesExercice Equiprojectivit Pompe Ptrole Corrigspectrum66Pas encore d'évaluation
- Exercices Cinmatique Trajectoires Vlo Cric EnoncDocument2 pagesExercices Cinmatique Trajectoires Vlo Cric Enoncspectrum66Pas encore d'évaluation
- Exercices Cinmatique Trajectoires Vlo Cric EnoncDocument2 pagesExercices Cinmatique Trajectoires Vlo Cric Enoncspectrum66Pas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum6650% (2)
- Exercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - EnoncDocument2 pagesExercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - Enoncspectrum660% (1)
- Exercice Cinmatique Trajectoires Pont Roulant CorrigDocument1 pageExercice Cinmatique Trajectoires Pont Roulant Corrigspectrum66Pas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - CorrigDocument2 pagesExercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - Corrigspectrum6675% (4)
- Exercice Cinmatique Trajectoires Pont Roulant CorrigDocument1 pageExercice Cinmatique Trajectoires Pont Roulant Corrigspectrum66Pas encore d'évaluation
- Exercice Cinmatique Trajectoires Essuie Glace CorrigDocument2 pagesExercice Cinmatique Trajectoires Essuie Glace Corrigspectrum66100% (1)
- Exercices Cinmatique Trajectoires Camion Benne Chariot Portuaire CorrigDocument2 pagesExercices Cinmatique Trajectoires Camion Benne Chariot Portuaire Corrigspectrum66100% (3)
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
- BacGE2010 (Baignoire) CorrigéDocument7 pagesBacGE2010 (Baignoire) Corrigéspectrum66Pas encore d'évaluation
- Joints A Levre A Contact Radial Arbre TournantDocument10 pagesJoints A Levre A Contact Radial Arbre Tournantspectrum66Pas encore d'évaluation
- 0312 Rectifieur de Production IndustrielleDocument8 pages0312 Rectifieur de Production Industriellespectrum66Pas encore d'évaluation
- Etude Et Maintenance Preventiv - BOUKILI Yassine - 555Document52 pagesEtude Et Maintenance Preventiv - BOUKILI Yassine - 555spectrum66Pas encore d'évaluation
- BacGE2008 ButBasketDocument23 pagesBacGE2008 ButBasketspectrum66Pas encore d'évaluation
- S2 - Controle01 (Potence+anneau) Et CorrigéDocument3 pagesS2 - Controle01 (Potence+anneau) Et CorrigéDamien Miranda100% (1)
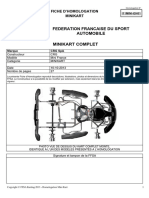
- Homologation Minikart CRG 2014Document27 pagesHomologation Minikart CRG 2014spectrum66Pas encore d'évaluation
- Modelisation Des Liaisons: MécaniqueDocument15 pagesModelisation Des Liaisons: Mécaniquespectrum66Pas encore d'évaluation
- ENGRENAGES DROITS Developpante de CercleDocument3 pagesENGRENAGES DROITS Developpante de Cerclespectrum66Pas encore d'évaluation
- S2 - Exercices (Tuyau+bride) Et CorrigéDocument3 pagesS2 - Exercices (Tuyau+bride) Et Corrigéspectrum66Pas encore d'évaluation
- TP Fluidisation - Pertes de ChargeDocument13 pagesTP Fluidisation - Pertes de Chargegoldorette67% (15)
- Chapitre 1 Et 2.pptm PDFDocument74 pagesChapitre 1 Et 2.pptm PDFNajlaealalawiPas encore d'évaluation
- Theorie Du Cycle FrigorifiqueDocument87 pagesTheorie Du Cycle Frigorifiquezizo46100% (3)
- Diffraction Des Rayons X: SujetDocument12 pagesDiffraction Des Rayons X: SujetMalki imanePas encore d'évaluation
- Cahier - 2267 - 2 (1) Guide Des Toitures Terrasses en Climat de MontagneDocument26 pagesCahier - 2267 - 2 (1) Guide Des Toitures Terrasses en Climat de MontagneKPODEHOUPas encore d'évaluation
- Modélisation Du Tsunami Aux Cotes TunisienneDocument31 pagesModélisation Du Tsunami Aux Cotes Tunisiennekanfoudih2855100% (1)
- Projet Traction Version PDFDocument9 pagesProjet Traction Version PDFKais BahrouniPas encore d'évaluation
- Chimie Quantique C1Document12 pagesChimie Quantique C1bouthain.guessab07Pas encore d'évaluation
- Presentation Partie ADocument19 pagesPresentation Partie ACedricPas encore d'évaluation
- Pour Comprendre Le Lyophilisateur, Partez de La Structure de Composition - Connaissances - NANBEI INSTRUMENT LIMITEDDocument6 pagesPour Comprendre Le Lyophilisateur, Partez de La Structure de Composition - Connaissances - NANBEI INSTRUMENT LIMITEDjessie badahaPas encore d'évaluation
- 3.transferts Thermiques, Flux Thermique, Résistance Thermique PDFDocument4 pages3.transferts Thermiques, Flux Thermique, Résistance Thermique PDFkimmikPas encore d'évaluation
- Chapitre V - Calcul Des Modes D'assemblageDocument15 pagesChapitre V - Calcul Des Modes D'assemblageBaye DiopPas encore d'évaluation
- CNED Physique Chimie 1ere S PDFDocument543 pagesCNED Physique Chimie 1ere S PDFStaki100% (5)
- HDR 2005 PDFDocument110 pagesHDR 2005 PDFJean-Jacques RahobisoaPas encore d'évaluation
- ITC Chapitre 3 - Hydraulique Des SolsDocument31 pagesITC Chapitre 3 - Hydraulique Des SolsBunchhayPas encore d'évaluation
- Notice de Montage Chauffe Eau Gaz Instantane Vergne cbc28 GP KitDocument16 pagesNotice de Montage Chauffe Eau Gaz Instantane Vergne cbc28 GP KitRahim HkmPas encore d'évaluation
- Pilote 4 Physique Chimie Bac Math T1 OcrDocument226 pagesPilote 4 Physique Chimie Bac Math T1 OcrAmadou Makhtar SeckPas encore d'évaluation
- Formalisme Du MIRDDocument61 pagesFormalisme Du MIRDwissamtouilaPas encore d'évaluation
- Extrait PDFDocument8 pagesExtrait PDFMehrez ChouraPas encore d'évaluation
- 2-7 Performances Des Vitrages Chapitre CompletDocument42 pages2-7 Performances Des Vitrages Chapitre Completapi-3709510100% (2)
- ERIC VERMESSE Fatigue Decapage TA6V AnodisationDocument170 pagesERIC VERMESSE Fatigue Decapage TA6V AnodisationElly PegPas encore d'évaluation
- Poutre Courbe PDFDocument61 pagesPoutre Courbe PDFGhorbel TarekPas encore d'évaluation
- Confiture 2 Processus de Gelification Des PectinesDocument15 pagesConfiture 2 Processus de Gelification Des PectinesChristopheChadoutaudPas encore d'évaluation
- RelativiteDocument54 pagesRelativiteRamzi BenameurPas encore d'évaluation
- Les Méthodes D'analyse Immediate Cours Chimie Nalytique de 2eme Année Pharmacie DR ADOUANIDocument19 pagesLes Méthodes D'analyse Immediate Cours Chimie Nalytique de 2eme Année Pharmacie DR ADOUANIAhmed ELBOUZIDIPas encore d'évaluation
- Physique MoleculaireDocument2 pagesPhysique MoleculaireMedKalouchPas encore d'évaluation
- RdM-Exams Corriges-07 18 PDFDocument56 pagesRdM-Exams Corriges-07 18 PDFKhou Loud0% (1)
- Chapitre 2Document8 pagesChapitre 2Arsene KouamePas encore d'évaluation
- FlammeDocument13 pagesFlammeilyesPas encore d'évaluation
- BP 4 PDFDocument9 pagesBP 4 PDFMalakChichiGuezouli100% (1)