Vous aimerez peut-être aussi
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentD'EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentPas encore d'évaluation
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsD'EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsPas encore d'évaluation
- Cours Traitement Du SignalDocument55 pagesCours Traitement Du SignalAdelSoualmiaPas encore d'évaluation
- Travaux PratiquesDocument19 pagesTravaux Pratiquesfouad LPRTPas encore d'évaluation
- Fondamentaux de L'electricité Générale PDFDocument13 pagesFondamentaux de L'electricité Générale PDFKouakou Khan100% (2)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Gps PrincipeDocument6 pagesGps Principeaqil_hchPas encore d'évaluation
- Fiche de TD N 01 Ver2.0 CorrigeDocument12 pagesFiche de TD N 01 Ver2.0 CorrigeBă ĶŕPas encore d'évaluation
- MoulageDocument11 pagesMoulagealphaPas encore d'évaluation
- Exam-MEF - ENSMM-2015 PDFDocument10 pagesExam-MEF - ENSMM-2015 PDFاشراقةاملPas encore d'évaluation
- Cours Filtrage NumeriqueDocument32 pagesCours Filtrage NumeriqueAmadou FallPas encore d'évaluation
- TPATDocument1 pageTPATKhalil HsainePas encore d'évaluation
- Conception de Circuits HFDocument48 pagesConception de Circuits HFNabil DakhliPas encore d'évaluation
- Cours Filtrage Multi CadenceDocument34 pagesCours Filtrage Multi Cadencesanogo mohamadou100% (1)
- S 3Document6 pagesS 3AliOucharPas encore d'évaluation
- Cours Traitement D'antennes ChonavelDocument38 pagesCours Traitement D'antennes ChonavelPix8Pas encore d'évaluation
- Solutions TD2 Dispositifs RFDocument4 pagesSolutions TD2 Dispositifs RFLE BARON100% (1)
- Chapitre 3-2019-2020 PDFDocument12 pagesChapitre 3-2019-2020 PDFbellaPas encore d'évaluation
- TP TNS 1en PDFDocument6 pagesTP TNS 1en PDFExoco-LMD AlgériePas encore d'évaluation
- TD TNSDocument69 pagesTD TNSAdil AbouelhassanPas encore d'évaluation
- CH 6Document32 pagesCH 6boulainine houriaPas encore d'évaluation
- Compte Rendu SapsDocument15 pagesCompte Rendu SapsAdel AdelPas encore d'évaluation
- Cours 1 Circuits Et Dispositifs Passifs Pour Microonde .HTMDocument6 pagesCours 1 Circuits Et Dispositifs Passifs Pour Microonde .HTMMegherbi RahalPas encore d'évaluation
- TP-Antennes GSM-WiFi - ProfDocument9 pagesTP-Antennes GSM-WiFi - ProfCharif MohamedPas encore d'évaluation
- Dokumen - Tips - TP 1 Transmission de Donne Inisiallisation A Simulink MatlabDocument15 pagesDokumen - Tips - TP 1 Transmission de Donne Inisiallisation A Simulink MatlabParfumerie Actu'EllePas encore d'évaluation
- TD 4 CN - L3 TélécomDocument12 pagesTD 4 CN - L3 TélécomHouda Senoussi100% (1)
- Compte Rendu - Filtre Pass Haut - Altium DesignerDocument7 pagesCompte Rendu - Filtre Pass Haut - Altium DesignerCherry CandyPas encore d'évaluation
- Chapitre4 FiltresHFDocument12 pagesChapitre4 FiltresHFAnonymous sRkitX100% (1)
- KHINTTTTTTTTTTTTTTDocument4 pagesKHINTTTTTTTTTTTTTTbibouPas encore d'évaluation
- TP 4 Performances Des Transmissions Num Riques en PR Sence D Un Canal AWGNDocument5 pagesTP 4 Performances Des Transmissions Num Riques en PR Sence D Un Canal AWGNAbir Ay Ed100% (2)
- Rapport de Stage Boutheyna l2 GeiiDocument12 pagesRapport de Stage Boutheyna l2 Geiithe xXx manPas encore d'évaluation
- Filtrage Numerique PDFDocument24 pagesFiltrage Numerique PDFAdil EljaafariPas encore d'évaluation
- Codage Et Information-Prof (Version Finale)Document143 pagesCodage Et Information-Prof (Version Finale)scar lightPas encore d'évaluation
- Compte RenduDocument18 pagesCompte RenduEl bouhouch KhadijaPas encore d'évaluation
- Les Antennes Et Les Lignes de TransmissionsDocument61 pagesLes Antennes Et Les Lignes de Transmissionsnebegtahar222100% (1)
- Matière Electronique Systèmes PDFDocument71 pagesMatière Electronique Systèmes PDFYassine BelhmerPas encore d'évaluation
- TP 4 2 CN 2021Document1 pageTP 4 2 CN 2021Houda SenoussiPas encore d'évaluation
- Antennes Et PropagationDocument21 pagesAntennes Et PropagationfethiPas encore d'évaluation
- Filtrage FrequentielDocument32 pagesFiltrage FrequentielSaf Bes100% (1)
- TD 3 2016Document2 pagesTD 3 2016kulerrrPas encore d'évaluation
- ExerciceDocument13 pagesExerciceLoubna ElPas encore d'évaluation
- Les Dimensions Nécessaires Pour Construire Une Antenne Patch Rectangulaire À La Fréquence 2.4 GHZDocument1 pageLes Dimensions Nécessaires Pour Construire Une Antenne Patch Rectangulaire À La Fréquence 2.4 GHZKhalid BuarramouPas encore d'évaluation
- TD N7Document10 pagesTD N7JesúsGambartePas encore d'évaluation
- Support Cours BoukerroumDocument41 pagesSupport Cours Boukerroumgratoss yacine100% (1)
- TP 3 3 CN 2021Document2 pagesTP 3 3 CN 2021Houda SenoussiPas encore d'évaluation
- Traitement Du Signal Examen 08Document4 pagesTraitement Du Signal Examen 08med chemkhiPas encore d'évaluation
- Analyse Des Signaux PDFDocument92 pagesAnalyse Des Signaux PDFELmokhtar HamrouniPas encore d'évaluation
- Abaque SmithDocument9 pagesAbaque SmithNourdine Cherabit100% (2)
- Propagation Des Onde ElectromagnitiqueDocument81 pagesPropagation Des Onde ElectromagnitiqueAissa AimenePas encore d'évaluation
- TP SignalDocument13 pagesTP SignalRabah HadjarPas encore d'évaluation
- Compte Rendu TP2 PDFDocument14 pagesCompte Rendu TP2 PDFAbderrazak Abd0% (1)
- Cours Lpro Web PDFDocument160 pagesCours Lpro Web PDFOumarPas encore d'évaluation
- Simulation D'un Patchhhhhhhhhh (1) - CopieDocument3 pagesSimulation D'un Patchhhhhhhhhh (1) - CopieWissam TizaPas encore d'évaluation
- Annales Des Exercices Et Examens TransmiDocument15 pagesAnnales Des Exercices Et Examens TransmiCF BUSINESSPas encore d'évaluation
- Chapitre 3 Lamplifcateur Hyperfréquence À TransistorDocument8 pagesChapitre 3 Lamplifcateur Hyperfréquence À TransistorLou LoulouPas encore d'évaluation
- Antenne Devoir 33 1Document20 pagesAntenne Devoir 33 1RaNià itPas encore d'évaluation
- Récepteur Radio PDFDocument12 pagesRécepteur Radio PDFnsiri100% (1)
- Filtrage Numerique SAMI2 EET2 MIQ2Document25 pagesFiltrage Numerique SAMI2 EET2 MIQ2Jean Gabin MengataPas encore d'évaluation
- Cours-Strategies de Codage Canal-1Document37 pagesCours-Strategies de Codage Canal-1ImedSiliniPas encore d'évaluation
- Travail Demandé: TP #5 Analyse Et Synthese Des Filtres AnalogiqueDocument2 pagesTravail Demandé: TP #5 Analyse Et Synthese Des Filtres Analogiquewafaa Guendouz100% (1)
- Dispositifs (Passifs-Actifs) RF Et Micro-Ondes PDFDocument3 pagesDispositifs (Passifs-Actifs) RF Et Micro-Ondes PDFNahed Ep KhaledPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Clefs66 FR Final PDFDocument27 pagesClefs66 FR Final PDFHaingonirina IgnacePas encore d'évaluation
- Inj ADNANI BOUBEKEUR PDFDocument125 pagesInj ADNANI BOUBEKEUR PDFucefPas encore d'évaluation
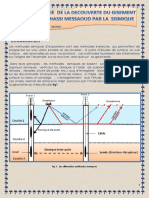
- Bref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La SismiqueDocument8 pagesBref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La Sismiquedjeddi mabrouk100% (3)
- Chimie TP1 Correction Eleve EtalonnageDocument1 pageChimie TP1 Correction Eleve Etalonnageoxford33Pas encore d'évaluation
- A Le Stator: - I PrésentationDocument24 pagesA Le Stator: - I PrésentationWiam MahboubPas encore d'évaluation
- Treinamento 2016-Hidro Sanitarias - Versao 2Document551 pagesTreinamento 2016-Hidro Sanitarias - Versao 2Niko RodriguesPas encore d'évaluation
- Cours4 P&C GCV2 IpsasDocument9 pagesCours4 P&C GCV2 IpsasbasssemPas encore d'évaluation
- Cheickna SackoDocument27 pagesCheickna SackoCheicknaPas encore d'évaluation
- Série D'exercices tcs2Document1 pageSérie D'exercices tcs2Série AsiatiquePas encore d'évaluation
- PROMO-MATHS Test 3Document3 pagesPROMO-MATHS Test 3CHETSA CédricPas encore d'évaluation
- BTS Cours 5 VADiscretesDocument9 pagesBTS Cours 5 VADiscreteslucie biholongPas encore d'évaluation
- Cartan DieudonneDocument2 pagesCartan DieudonneAYA OUEZGANPas encore d'évaluation
- These Afif 2002Document208 pagesThese Afif 2002Mohamed BGcityPas encore d'évaluation
- Cours Hacheur SerieDocument15 pagesCours Hacheur SerieMaxence KouessiPas encore d'évaluation
- SC L'équilibreDocument55 pagesSC L'équilibreMourad ThbPas encore d'évaluation
- Fiches Cesar 2d FR v1Document2 pagesFiches Cesar 2d FR v1Jasmin AgriPas encore d'évaluation
- Glissement - FR - 2016 - Web PDFDocument196 pagesGlissement - FR - 2016 - Web PDFTuan NguyenPas encore d'évaluation
- Controle HydroDocument2 pagesControle HydroAnonymous 80p9OVPas encore d'évaluation
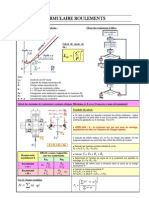
- RoulementsDocument1 pageRoulementsissatkaPas encore d'évaluation
- TD 4 Et 5 Avec Correction 2022Document12 pagesTD 4 Et 5 Avec Correction 2022ABDELKADER SULTANE OFFICIELPas encore d'évaluation
- Pfe VRDDocument70 pagesPfe VRDkhalid ilalenPas encore d'évaluation
- Electro 2Document2 pagesElectro 2LeavMenghuyPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015)Document4 pagesDevoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015)Batata bluePas encore d'évaluation
- Chap 2Document7 pagesChap 2أيمن أيمنPas encore d'évaluation
- Rapport PfeDocument92 pagesRapport PfeGhazi HamoudaPas encore d'évaluation
- 07 Calcul Numerique Scilab6Document16 pages07 Calcul Numerique Scilab6Esther YaroPas encore d'évaluation