Vous aimerez peut-être aussi
- 106-Smart Cities - État de L'artDocument15 pages106-Smart Cities - État de L'artMohamedAliOuhaddouPas encore d'évaluation
- 116-18-Prévention Des Accidents Électriques - Présentation GénéraleDocument17 pages116-18-Prévention Des Accidents Électriques - Présentation GénéraleyoussefoneaneziPas encore d'évaluation
- 104 Compteurs CADocument9 pages104 Compteurs CAMohamedAliOuhaddouPas encore d'évaluation
- F10132 0 10 09 - Trafo - WebDocument8 pagesF10132 0 10 09 - Trafo - WebMohamedAliOuhaddouPas encore d'évaluation
- 109-Câbles Aériens IsolésDocument16 pages109-Câbles Aériens IsolésMohamedAliOuhaddouPas encore d'évaluation
- Td4-Figures PrintDocument5 pagesTd4-Figures PrintMohamedAliOuhaddouPas encore d'évaluation
- 104 Reseaux Elect IntelligentsDocument32 pages104 Reseaux Elect IntelligentsMohamedAliOuhaddouPas encore d'évaluation
- 120-18-Matériel Électrique en Atmosphère Explosible. Sécurité IntrinsèqueDocument29 pages120-18-Matériel Électrique en Atmosphère Explosible. Sécurité IntrinsèqueMohamedAliOuhaddouPas encore d'évaluation
- 104 Protect Donn PersonDocument22 pages104 Protect Donn PersonMohamedAliOuhaddouPas encore d'évaluation
- 104 Smart GridDocument35 pages104 Smart GridMohamedAliOuhaddouPas encore d'évaluation
- 104 Attaques SystemesDocument17 pages104 Attaques SystemesMohamedAliOuhaddouPas encore d'évaluation
- 104 Comptage ElectriciteDocument8 pages104 Comptage ElectriciteMohamedAliOuhaddouPas encore d'évaluation
- Td3-Figures PrintDocument5 pagesTd3-Figures PrintMohamedAliOuhaddouPas encore d'évaluation
- Td2-Figures PrintDocument6 pagesTd2-Figures PrintMohamedAliOuhaddouPas encore d'évaluation
- Td1-Figures Print PDFDocument11 pagesTd1-Figures Print PDFMohamedAliOuhaddouPas encore d'évaluation
- Td1-Figures Print PDFDocument11 pagesTd1-Figures Print PDFMohamedAliOuhaddouPas encore d'évaluation
- Td5-Figures PrintDocument5 pagesTd5-Figures PrintMohamedAliOuhaddouPas encore d'évaluation
- Td1-Figures Print PDFDocument11 pagesTd1-Figures Print PDFMohamedAliOuhaddouPas encore d'évaluation
- Cours RDM Théorie Des PoutresDocument13 pagesCours RDM Théorie Des PoutresEmmanuel FrancisPas encore d'évaluation
- Flambage1 PDFDocument4 pagesFlambage1 PDFSmail BenidirPas encore d'évaluation
- DS Mathématiques Jukand PDFDocument6 pagesDS Mathématiques Jukand PDFMohamedAliOuhaddouPas encore d'évaluation
- Etude de Certaines Parties Du Pont de L'europe A OrleansDocument10 pagesEtude de Certaines Parties Du Pont de L'europe A OrleansMohamedAliOuhaddouPas encore d'évaluation
- Rapport Sur Les Services de L'etat Gérés de Manière AutonomeDocument94 pagesRapport Sur Les Services de L'etat Gérés de Manière AutonomeB.I100% (1)
- Etude Des Freins V-BrakeDocument7 pagesEtude Des Freins V-BrakeMohamedAliOuhaddouPas encore d'évaluation
- Chap. 1 - Hypoth'eses de La R Esistance PDFDocument5 pagesChap. 1 - Hypoth'eses de La R Esistance PDFMohamedAliOuhaddouPas encore d'évaluation
- Ste One #T09-P09Document18 pagesSte One #T09-P09BelkacemBouchamaPas encore d'évaluation
- Déformation Des Poutres Rectilignes Effort NormalDocument16 pagesDéformation Des Poutres Rectilignes Effort Normaloussougoudj100% (1)
- Rapport Sur Les Dépenses FiscalesDocument87 pagesRapport Sur Les Dépenses FiscalesB.I100% (1)
- ST One #T61-P61 PDFDocument12 pagesST One #T61-P61 PDFMohamedAliOuhaddouPas encore d'évaluation
- MMC Exo CorrigerDocument4 pagesMMC Exo Corrigerounous100% (4)
- 3 - CisaillementDocument4 pages3 - CisaillementSamsouma BkPas encore d'évaluation
- BA Chapitre 6Document6 pagesBA Chapitre 6Iheb GoujaaPas encore d'évaluation
- ST012 SDocument19 pagesST012 Shammouche_soufianePas encore d'évaluation
- Chapitre 5 Élément PlaqueDocument31 pagesChapitre 5 Élément PlaqueMohamed ZaharPas encore d'évaluation
- Abdelghani Rahal PDFDocument81 pagesAbdelghani Rahal PDFanon_527110014Pas encore d'évaluation
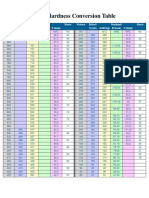
- Steel Hardness Conversion TableDocument1 pageSteel Hardness Conversion TableNamık EserPas encore d'évaluation
- Chapitre 2Document22 pagesChapitre 2Pãtø Àmînė100% (1)
- TD Exercices SimplesDocument2 pagesTD Exercices SimplesSalah benhsPas encore d'évaluation
- CH 9 Microstuctures TDDocument10 pagesCH 9 Microstuctures TDSou HirrPas encore d'évaluation
- Etude de Coffrage Et de Ferraillage DesDocument71 pagesEtude de Coffrage Et de Ferraillage DesaminPas encore d'évaluation
- ISILF15 P 175 EcamDocument25 pagesISILF15 P 175 EcamjohnautodidactePas encore d'évaluation
- QCM 2 - QuestionsDocument3 pagesQCM 2 - QuestionsAbd-ouahed BoussaidPas encore d'évaluation
- ACFrOgBKzf1385QSRlwPvvXSBbVxzjPV99GpWv5bmptzYDYFGVQwxJPMxtiBXp8CqfemclZHdKw7SSQVpCUn025sSybqmMEkXKyjWGW8Vh9JbGjM4P3xH2psWYdarcZxzBaVSingKAsFB3TR7j U PDFDocument10 pagesACFrOgBKzf1385QSRlwPvvXSBbVxzjPV99GpWv5bmptzYDYFGVQwxJPMxtiBXp8CqfemclZHdKw7SSQVpCUn025sSybqmMEkXKyjWGW8Vh9JbGjM4P3xH2psWYdarcZxzBaVSingKAsFB3TR7j U PDFBouchra BkhtmPas encore d'évaluation
- Cours de Construction Metallique I PDFDocument97 pagesCours de Construction Metallique I PDFoussama ibrahimPas encore d'évaluation
- Cours Soudures - Dossier Élèves - BTS AMCR MartiguesDocument4 pagesCours Soudures - Dossier Élèves - BTS AMCR MartiguesWissem TaktakPas encore d'évaluation
- Projet RapportDocument10 pagesProjet RapportkabaPas encore d'évaluation
- BAEL (Exercices)Document9 pagesBAEL (Exercices)ismail lak100% (1)
- MadjidDocument20 pagesMadjidlaloui abdelmadjidPas encore d'évaluation
- Choix Conduite PEHDDocument41 pagesChoix Conduite PEHDbmmedPas encore d'évaluation
- Semelles IsoDocument20 pagesSemelles IsoYassine BelkPas encore d'évaluation
- SYS-849-8 Mise en Forme Par Deformation Plastique I - Sheet MetalDocument42 pagesSYS-849-8 Mise en Forme Par Deformation Plastique I - Sheet MetalmedPas encore d'évaluation
- Convéction NaturelleDocument14 pagesConvéction NaturelleBilal Bouakrif0% (1)
- Béton Armé - Arche Poutre Sous BAELDocument20 pagesBéton Armé - Arche Poutre Sous BAELAndo Jean Rochel100% (1)
- Tableaux Des Classes de SectionDocument13 pagesTableaux Des Classes de SectionHuynh-Trong TaiPas encore d'évaluation
- Examen BADocument2 pagesExamen BArami feki100% (1)
- 0 - Intr Défaillances Des Systèmes IndustrielsDocument43 pages0 - Intr Défaillances Des Systèmes IndustrielsnoureddinePas encore d'évaluation
- Rigidite FRDocument4 pagesRigidite FRsiadPas encore d'évaluation
- Rapport Christian NgokioDocument28 pagesRapport Christian NgokioPHAM Duong HungPas encore d'évaluation