Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- 04 Exo Similitudes DirectesDocument7 pages04 Exo Similitudes Directeschaddad abdllah100% (1)
- Similitudes CorrectionDocument11 pagesSimilitudes CorrectionAli BouroPas encore d'évaluation
- 39 ConiquesDocument6 pages39 ConiquesaymenkechichePas encore d'évaluation
- Répartition-3ème-Sciences Technique-2020-2021Document1 pageRépartition-3ème-Sciences Technique-2020-2021chaker albouchiPas encore d'évaluation
- 7 - Format Bac Série C 200327-1Document7 pages7 - Format Bac Série C 200327-1Xray34Pas encore d'évaluation
- Ex VecteursDocument5 pagesEx Vecteursbeebac2009Pas encore d'évaluation
- Isometrie CoursDocument6 pagesIsometrie CoursSalihou Alhadji100% (1)
- Epreuve de Geometrie Ens Yaounde 2011Document1 pageEpreuve de Geometrie Ens Yaounde 2011LazarePas encore d'évaluation
- 13 G 18 Bis A 01 Maths S1 S3Document3 pages13 G 18 Bis A 01 Maths S1 S3Manizan Emmanuel YaoPas encore d'évaluation
- Maths 1èrecDocument2 pagesMaths 1èrecYanoussa TEBAYAPas encore d'évaluation
- Maths 3emeDocument5 pagesMaths 3emeCabinet de Gestion et d'Assistance FinancierePas encore d'évaluation
- Correction Ex 2 Arithm Bacblanc 122016Document3 pagesCorrection Ex 2 Arithm Bacblanc 122016Bourama DjirePas encore d'évaluation
- TS Sujets Bac EspaceDocument11 pagesTS Sujets Bac EspaceDJIL BENPas encore d'évaluation
- Chapitre Polynomes CorrectionDocument7 pagesChapitre Polynomes CorrectionAhmed Said100% (1)
- TD5 Barycentre KPTDocument3 pagesTD5 Barycentre KPTSalifou SawadogoPas encore d'évaluation
- Algebre de Boole Exercice CorrigeDocument3 pagesAlgebre de Boole Exercice Corrigemedsalemx3051Pas encore d'évaluation
- Fascicule Nombres ComplexesDocument97 pagesFascicule Nombres ComplexesjamaldeidaPas encore d'évaluation
- Série Corrigée - Math - Géométrie Dans L'espace - 2ème Sciences Exp (2015-2016) Mme GUESMIA AZIZADocument11 pagesSérie Corrigée - Math - Géométrie Dans L'espace - 2ème Sciences Exp (2015-2016) Mme GUESMIA AZIZAFOUED TORJMANE100% (2)
- Math Premier Cycle Ens Yaounde 2008Document2 pagesMath Premier Cycle Ens Yaounde 2008afrilanePas encore d'évaluation
- Solution Des Exercices - Repérage - 2nd - SunudaaraDocument5 pagesSolution Des Exercices - Repérage - 2nd - SunudaaraAhmadou Gueye SallPas encore d'évaluation
- 01 Fiche Sur Equation Et Inequation Avec Des Valeurs Absolues PDFDocument2 pages01 Fiche Sur Equation Et Inequation Avec Des Valeurs Absolues PDFfaye100% (2)
- Devoir Commun - Lycee LymamoulayeDocument1 pageDevoir Commun - Lycee LymamoulayeSeydina WadePas encore d'évaluation
- Devoir de Contrôle N°1 2019 2020 (MR El Fekih Nader)Document3 pagesDevoir de Contrôle N°1 2019 2020 (MR El Fekih Nader)Mohamed AjroudPas encore d'évaluation
- Sujet Du Bepc Blanc 2020 Epreuve de MathemariquesDocument3 pagesSujet Du Bepc Blanc 2020 Epreuve de Mathemariquesalyson SephoraPas encore d'évaluation
- Cours de Maths Tle D Apc Ecole OnlineDocument194 pagesCours de Maths Tle D Apc Ecole OnlineLadjale MaxPas encore d'évaluation
- Série Dexercices Et Problèmes de Synthèse TS1 2013 2014-1-1Document122 pagesSérie Dexercices Et Problèmes de Synthèse TS1 2013 2014-1-1hamidou100% (1)
- TD N°1 Classe de 4èDocument3 pagesTD N°1 Classe de 4èJoël DabiréPas encore d'évaluation
- Collection Seq4 PreC 2019 2020Document33 pagesCollection Seq4 PreC 2019 2020Pascie Wafo TenePas encore d'évaluation
- Burkina 2015 D 1ertourDocument2 pagesBurkina 2015 D 1ertourAdams KOURAOGOPas encore d'évaluation
- Concours Ensa 2022 MATHSDocument2 pagesConcours Ensa 2022 MATHSSeydina omar LoPas encore d'évaluation
- Devoir de MathDocument2 pagesDevoir de MathHayk El100% (1)
- Serie de Revision Analyse 1 2021Document3 pagesSerie de Revision Analyse 1 2021Yassine RiahiPas encore d'évaluation
- Maths 2C - L4 - GENERALITES SUR LES FONCTIONS FINAL (Réparé) PDFDocument23 pagesMaths 2C - L4 - GENERALITES SUR LES FONCTIONS FINAL (Réparé) PDFYoman Arthur verdier AssuiPas encore d'évaluation
- Epreuve de MathématiquesDocument2 pagesEpreuve de MathématiquesOloufadé hafizPas encore d'évaluation
- Sunumaths Document 1Document6 pagesSunumaths Document 1Mouhamadou Ndoucoumane MBENGUEPas encore d'évaluation
- TC Maths Leçon 14 Isometrie Du PlanDocument23 pagesTC Maths Leçon 14 Isometrie Du PlanSam NarutoPas encore d'évaluation
- Exercices Arithmetique PDFDocument35 pagesExercices Arithmetique PDFAbdoul-lahi Saâdou MoussaPas encore d'évaluation
- 2nde S Fascicule DéfinitifDocument44 pages2nde S Fascicule DéfinitifAmadou DIOPPas encore d'évaluation
- Cours de Maths Gbat1Document59 pagesCours de Maths Gbat1diouentemohamed13Pas encore d'évaluation
- 4 TDDocument6 pages4 TDAshraf Ouro-adohiPas encore d'évaluation
- Les BarycentresDocument9 pagesLes BarycentresFadlou ISSAKAPas encore d'évaluation
- Examen National Mathematiques Sciences Maths 2020 Rattrapage SujetDocument4 pagesExamen National Mathematiques Sciences Maths 2020 Rattrapage Sujetel khomri0% (1)
- Généralités Sur Les Fonctions 9Document27 pagesGénéralités Sur Les Fonctions 9FULGENCE DIBIPas encore d'évaluation
- TleC - PHY - L4 - Mouvement Dans Les Champs G Et E UniformesDocument12 pagesTleC - PHY - L4 - Mouvement Dans Les Champs G Et E UniformesBahi GraceemmaPas encore d'évaluation
- Sujets de Baccalaureat MalienDocument40 pagesSujets de Baccalaureat MalienAlban tienouPas encore d'évaluation
- LN Exp BAC 2020Document11 pagesLN Exp BAC 2020Seydina WadePas encore d'évaluation
- Exercices Corriges Complexes PDFDocument12 pagesExercices Corriges Complexes PDFabdnaji asdad100% (1)
- 2s BarycentreDocument2 pages2s BarycentreIsmaila MbodjPas encore d'évaluation
- 08 - La Fonction Logarithme NeperienDocument6 pages08 - La Fonction Logarithme NeperienRte Erz100% (1)
- Terminale S Devoir Surveillé N°2: Corrigé: Exercice 1: 10 PtsDocument3 pagesTerminale S Devoir Surveillé N°2: Corrigé: Exercice 1: 10 PtsMomo LastarPas encore d'évaluation
- 4°M DC1.1718 IssaouiHacenDocument2 pages4°M DC1.1718 IssaouiHacenchaker albouchiPas encore d'évaluation
- Devoir 1ere CDocument2 pagesDevoir 1ere CIrénée Kinda100% (1)
- Cle-Grille Apmb Bac-C 2021Document12 pagesCle-Grille Apmb Bac-C 2021Senyo Komi100% (2)
- ! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldDocument59 pages! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldAminata PouyePas encore d'évaluation
- MATHS 2nde S CorrigéDocument3 pagesMATHS 2nde S CorrigéSenyo AWLEGU100% (1)
- BC - JaugeDocument7 pagesBC - JaugeCarly ngassamPas encore d'évaluation
- COURS DENOMBREMENT TS2 TL 3214 LMR - BarDocument7 pagesCOURS DENOMBREMENT TS2 TL 3214 LMR - BarAbdoulaye FayePas encore d'évaluation
- TD Nombre Reel Du Web PDFDocument5 pagesTD Nombre Reel Du Web PDFGeek Former100% (1)
- Le Travail de La FemmeDocument7 pagesLe Travail de La FemmeSleh Ben SoltanPas encore d'évaluation
- Nombres C 4SC1Document6 pagesNombres C 4SC1Sleh Ben SoltanPas encore d'évaluation
- Suites Globalement CroissantesDocument5 pagesSuites Globalement CroissantesSleh Ben SoltanPas encore d'évaluation
- 3 M Ex RotationsDocument2 pages3 M Ex RotationsSleh Ben Soltan100% (1)
- DC1 4eco KahiaDocument2 pagesDC1 4eco KahiaSleh Ben SoltanPas encore d'évaluation
- Liste Des RessourcesDocument15 pagesListe Des RessourcesSleh Ben SoltanPas encore d'évaluation
- 3eme Chimie I Exo Corrige v3.0Document10 pages3eme Chimie I Exo Corrige v3.0Sleh Ben SoltanPas encore d'évaluation
- 03 Exo Suites ArithmetiquesDocument1 page03 Exo Suites ArithmetiquesSleh Ben Soltan100% (1)
- Cour Limit ContinuiteDocument3 pagesCour Limit ContinuiteSleh Ben SoltanPas encore d'évaluation
- Devoir de Synthese N1-1ere Annee Secondaire-Sciences SVT-2018 - Lycee Khawarizmi MsakinDocument5 pagesDevoir de Synthese N1-1ere Annee Secondaire-Sciences SVT-2018 - Lycee Khawarizmi MsakinSleh Ben SoltanPas encore d'évaluation
- Pages D'amour 1 PDFDocument2 pagesPages D'amour 1 PDFSleh Ben Soltan100% (1)
- Chimie-Dosages Par TitragesDocument33 pagesChimie-Dosages Par TitragesSleh Ben SoltanPas encore d'évaluation
- 3S Et M Fiche Nombre Dérivé+ex BilanDocument2 pages3S Et M Fiche Nombre Dérivé+ex BilanSleh Ben SoltanPas encore d'évaluation
- Série D'exercices - Math - Limite Et Continuité - Bac Eco GestionDocument3 pagesSérie D'exercices - Math - Limite Et Continuité - Bac Eco GestionSleh Ben Soltan70% (10)
- 1r ThalesDocument2 pages1r ThalesSleh Ben SoltanPas encore d'évaluation
- Exercices Calcul Integral Corriges - pdf1Document57 pagesExercices Calcul Integral Corriges - pdf1Sleh Ben SoltanPas encore d'évaluation
- Livre Du Professeur 2013 Histoire Geograhie 6eDocument78 pagesLivre Du Professeur 2013 Histoire Geograhie 6eSleh Ben Soltan100% (2)
- Calcul de LimitesDocument3 pagesCalcul de LimitesSleh Ben Soltan0% (1)
- Série D'exercices - Math - Limite Et Continuité - Bac Eco GestionDocument3 pagesSérie D'exercices - Math - Limite Et Continuité - Bac Eco GestionSleh Ben Soltan70% (10)
- Generalite FCTDocument2 pagesGeneralite FCTSleh Ben SoltanPas encore d'évaluation
- Séries ExercicesDocument3 pagesSéries ExercicesSleh Ben SoltanPas encore d'évaluation
- Révision 31Document1 pageRévision 31Sleh Ben SoltanPas encore d'évaluation
- Matric 1Document2 pagesMatric 1Sleh Ben Soltan100% (1)
- Texte LitteraireDocument18 pagesTexte LitteraireSleh Ben SoltanPas encore d'évaluation
- 13 - 2005 GLNFDocument15 pages13 - 2005 GLNFDesire SaccalPas encore d'évaluation
- TP CAO 3D Pompe A MainDocument14 pagesTP CAO 3D Pompe A MainBouraoui Ben AyedPas encore d'évaluation
- POULENC-Les Chemins 2sax AA-pno - Alto Sax 1, 2 Parts PDFDocument8 pagesPOULENC-Les Chemins 2sax AA-pno - Alto Sax 1, 2 Parts PDFJavier TelloPas encore d'évaluation
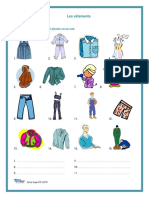
- Les Vetements Exercices Et CorrigeDocument8 pagesLes Vetements Exercices Et CorrigeBelkysGoncalves33% (3)
- Les Caracteristiques de L'estetique BaroqueDocument1 pageLes Caracteristiques de L'estetique BaroqueMarija ErorPas encore d'évaluation
- Repertoire Des Ateliers Creatifs 05 PDFDocument38 pagesRepertoire Des Ateliers Creatifs 05 PDFdonguiePas encore d'évaluation
- Omelette de Brillat SavarinDocument2 pagesOmelette de Brillat SavarinHPRGPas encore d'évaluation
- Le GVDocument5 pagesLe GVElena100% (1)
- Passage DDocument4 pagesPassage Dpsycoactivo100% (1)
- Fine Fine LineDocument7 pagesFine Fine Lineneon__pandaPas encore d'évaluation
- Cuore VentimiglieseDocument22 pagesCuore VentimiglieseAmoreViolaPas encore d'évaluation
- Gilbert Gatore PDFDocument2 pagesGilbert Gatore PDFPOLLYANNA MONTEIRO MICHELOTTOPas encore d'évaluation
- Selection C PDFDocument166 pagesSelection C PDFMalick DiopPas encore d'évaluation
- 6 Les Verbes Aimer Adorer Et Detester PDFDocument2 pages6 Les Verbes Aimer Adorer Et Detester PDFfanita22Pas encore d'évaluation
- Evaluation Formative 1Document5 pagesEvaluation Formative 1Boutaina KhiariPas encore d'évaluation
- Dzexams Uploads Sujets 514835Document4 pagesDzexams Uploads Sujets 514835Netflix movies Watch and Download freePas encore d'évaluation
- Luther Et Le Luthéranisme, FR Henri Denifle OP, T IIIDocument516 pagesLuther Et Le Luthéranisme, FR Henri Denifle OP, T IIIdfPas encore d'évaluation
- La FilleDocument11 pagesLa FilleCéliaPas encore d'évaluation
- Boismortier Re Menor Trompeta y TubaDocument3 pagesBoismortier Re Menor Trompeta y TubaÀngel García MartínezPas encore d'évaluation
- 3 Dimanche BDocument2 pages3 Dimanche BRalf WolwerinePas encore d'évaluation
- Tarifs FT Nouvelle Insignia MY18Document15 pagesTarifs FT Nouvelle Insignia MY18Ionascu VioletaPas encore d'évaluation
- Cours7 - Meditation de La Parole - Restauration de L'âmeDocument3 pagesCours7 - Meditation de La Parole - Restauration de L'âmeMathias AGPas encore d'évaluation
- Exam Francais 6aep Tantan 2018Document2 pagesExam Francais 6aep Tantan 2018Soufiane ZianiPas encore d'évaluation
- Dracula's America : PrésentationDocument6 pagesDracula's America : PrésentationchasaPas encore d'évaluation
- Etude de La Planification Radio D'un Réseau Umts PDFDocument102 pagesEtude de La Planification Radio D'un Réseau Umts PDFMed Amine CherifPas encore d'évaluation
- Roger Dachez - Les Origines de La Maconnerie SpeculativeDocument14 pagesRoger Dachez - Les Origines de La Maconnerie SpeculativeSax_Crus100% (1)
- Brioche Hyeroise HVDocument6 pagesBrioche Hyeroise HVSébastien RichezPas encore d'évaluation
- La Puce A L'oreille, Feydeau GeorgesDocument91 pagesLa Puce A L'oreille, Feydeau GeorgeseremeevionPas encore d'évaluation
- Memoire HoldsworthDocument54 pagesMemoire HoldsworthHervé Olsen100% (3)
- 15 SMS POUR DRAGUER UNE FILLE !!.SRTDocument5 pages15 SMS POUR DRAGUER UNE FILLE !!.SRTMarcos MartinezPas encore d'évaluation