Vous aimerez peut-être aussi
- Ucb-Periodic Table FRDocument2 pagesUcb-Periodic Table FRKosta Jakic100% (1)
- Merchandising PDFDocument1 pageMerchandising PDFIlhame75% (8)
- PID CoursDocument5 pagesPID CoursNdolo KamerPas encore d'évaluation
- Cours Monde3D 2017 08-NormalMappingDocument15 pagesCours Monde3D 2017 08-NormalMappingimedPas encore d'évaluation
- Analyse Numérique (L2S4 / PSI) Sujet de Travaux Pratiques No 1Document3 pagesAnalyse Numérique (L2S4 / PSI) Sujet de Travaux Pratiques No 1raissirachid8Pas encore d'évaluation
- Depliant KastingDocument2 pagesDepliant Kastingherve HENRYPas encore d'évaluation
- Part IoralDocument68 pagesPart IoralSerigne GueyePas encore d'évaluation
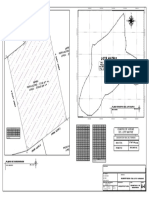
- Vue en Plan Format A0Document1 pageVue en Plan Format A0NZOKOU ABAGHA VIVIENPas encore d'évaluation
- Chapitre 3 - Léquilibre Macroéconomique Partie 1Document15 pagesChapitre 3 - Léquilibre Macroéconomique Partie 1aissirayane24Pas encore d'évaluation
- سرعاتDocument3 pagesسرعاتFerial Hadj ElghoulPas encore d'évaluation
- Vue en Plan Format A3Document1 pageVue en Plan Format A3NZOKOU ABAGHA VIVIENPas encore d'évaluation
- Différents Systèmes de Coordonnées Document I:: e e e e e e e e eDocument1 pageDifférents Systèmes de Coordonnées Document I:: e e e e e e e e eAdam ChPas encore d'évaluation
- Thana No-49-Basdila Khap-EDocument1 pageThana No-49-Basdila Khap-EbrickchattelsPas encore d'évaluation
- 4am Dc1corr Tunis2008Document5 pages4am Dc1corr Tunis2008ahmed benabdelkaderPas encore d'évaluation
- Série D'exercices Gestion de Projet - CopieDocument6 pagesSérie D'exercices Gestion de Projet - CopiealiPas encore d'évaluation
- Thana No-48-Nasedila Khas-1Document1 pageThana No-48-Nasedila Khas-1brickchattelsPas encore d'évaluation
- MCDocument1 pageMCyuyu yayaPas encore d'évaluation
- Aip 651ec49ae52d0Document1 pageAip 651ec49ae52d0desperben.mlPas encore d'évaluation
- Equations Diff Erentielles Sous Espaces VectorielsDocument4 pagesEquations Diff Erentielles Sous Espaces VectorielsYahya MazouariPas encore d'évaluation
- SL - Pampeñita 2023-SEMANALDocument1 pageSL - Pampeñita 2023-SEMANALTINO PAOLO CAPARI ANCOPas encore d'évaluation
- Feelings Mike BrantDocument2 pagesFeelings Mike BrantprudlouisPas encore d'évaluation
- Plan de Ligne - Busratp - Ligne 421Document1 pagePlan de Ligne - Busratp - Ligne 421lukresseplPas encore d'évaluation
- Chapitre 1 - Structure Des Entités ChimiquesDocument8 pagesChapitre 1 - Structure Des Entités ChimiqueslamloumiPas encore d'évaluation
- Mac Application TorseurDocument2 pagesMac Application TorseurKouki NizarPas encore d'évaluation
- Political Science IIIDocument4 pagesPolitical Science IIIArav TiwariPas encore d'évaluation
- Long 1Document1 pageLong 1Jalu MegaPas encore d'évaluation
- TD ComplexesDocument4 pagesTD Complexesanas achmitPas encore d'évaluation
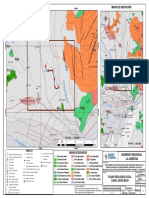
- E014-Mapa Geologico Regional 1 500 000Document1 pageE014-Mapa Geologico Regional 1 500 000Li SaldivarPas encore d'évaluation
- Vip " " T4.5: CM CMDocument1 pageVip " " T4.5: CM CMTajarPas encore d'évaluation
- MergedDocument2 pagesMergedLucasPas encore d'évaluation
- TDIADocument4 pagesTDIAAbdel MAJID ED-DAHBIPas encore d'évaluation
- 144 ST 1070 F04 - Rev0Document1 page144 ST 1070 F04 - Rev0Paulo ValenzuelaPas encore d'évaluation
- CCP PC 2015 Physique EpreuveDocument16 pagesCCP PC 2015 Physique EpreuveaabyPas encore d'évaluation
- TD1 Methodes Numeriques PDFDocument2 pagesTD1 Methodes Numeriques PDFFarid Morabet100% (1)
- متن الباقيات الصالحاتDocument4 pagesمتن الباقيات الصالحاتAbu-ahmad TajPas encore d'évaluation
- Une Vie de ChienDocument6 pagesUne Vie de ChienChrysalidePas encore d'évaluation
- 6-1-Plan D'implantation Des Pieux Et Dalle D'ancrageDocument1 page6-1-Plan D'implantation Des Pieux Et Dalle D'ancrageKina BouhafsPas encore d'évaluation
- Yiùoo: Eirsl?Document1 pageYiùoo: Eirsl?SMITHPas encore d'évaluation
- Pp-SistemaDocument1 pagePp-Sistemacesar cerna nievesPas encore d'évaluation
- Republique Algerienne Democratique Et Populaire: LegendeDocument1 pageRepublique Algerienne Democratique Et Populaire: LegendeGHOMIDPas encore d'évaluation
- Vigas 1º Pav Folha 1 - A1Document1 pageVigas 1º Pav Folha 1 - A1Alam GalimbertiPas encore d'évaluation
- Schéma de Structure: Garder & Revivre Les Traces de L'histoireDocument1 pageSchéma de Structure: Garder & Revivre Les Traces de L'histoireArchi ProjetPas encore d'évaluation
- Vigas Cintamento 1Document1 pageVigas Cintamento 1Wil OliveiraPas encore d'évaluation
- U-02 Situatie ExistentaDocument1 pageU-02 Situatie ExistentagobekgobekPas encore d'évaluation
- TSA 2018-chp1-KEDIRDocument24 pagesTSA 2018-chp1-KEDIRIlyas KendouciPas encore d'évaluation
- Chapitre7 Travail EnergieDocument12 pagesChapitre7 Travail EnergieAstrid OlartePas encore d'évaluation
- SLOT PU SP-EXE PL 00.bDocument1 pageSLOT PU SP-EXE PL 00.bvictor muléPas encore d'évaluation
- Suite KieuDocument15 pagesSuite KieuChad HernandezPas encore d'évaluation
- PLAN D'AMENAGEMENT NOE ModelDocument1 pagePLAN D'AMENAGEMENT NOE Modelbata filyPas encore d'évaluation
- Mapa Geologico Local - Canal Sauce BajoDocument1 pageMapa Geologico Local - Canal Sauce BajoRAUL MONTEZAPas encore d'évaluation
- 3.2. Plano Ubicacion de Calicatas y Zonificacion-PctpDocument1 page3.2. Plano Ubicacion de Calicatas y Zonificacion-PctpjessienayelizamoraterronesPas encore d'évaluation
- Peta LintasanDocument1 pagePeta LintasanMuhammad LuthfiPas encore d'évaluation
- Plan Boitier T4Document1 pagePlan Boitier T4Mou MouPas encore d'évaluation
- Weinerberger Poster Récap 2024Document1 pageWeinerberger Poster Récap 2024Julien MauricePas encore d'évaluation
- Plan TPG 2022 Geo PDFDocument1 pagePlan TPG 2022 Geo PDFYoann Gino ChiaffredoPas encore d'évaluation
- Lamina A-2Document1 pageLamina A-2Vasques Timoteo RonalPas encore d'évaluation
- Proposed Layout at Jogodishpur (Option-1)Document1 pageProposed Layout at Jogodishpur (Option-1)saloman.vasuprada28Pas encore d'évaluation
- Lamina A-4Document1 pageLamina A-4Vasques Timoteo RonalPas encore d'évaluation
- Planta Spda AssDocument1 pagePlanta Spda AssCleberson FerrazPas encore d'évaluation
- TP1 FuzzyuDocument4 pagesTP1 FuzzyuwsrfcvPas encore d'évaluation
- 2019 Cours Automatismes-1Document41 pages2019 Cours Automatismes-1wsrfcvPas encore d'évaluation
- TP2 FuzzyuDocument2 pagesTP2 FuzzyuwsrfcvPas encore d'évaluation
- Polycopie Traitement Signal-S6Document93 pagesPolycopie Traitement Signal-S6wsrfcvPas encore d'évaluation
- Exercice 1: Monte-Charge: 1 N. Kabbaj, Automates Programmables Industriels 2015Document17 pagesExercice 1: Monte-Charge: 1 N. Kabbaj, Automates Programmables Industriels 2015wsrfcvPas encore d'évaluation
- Fiche 03Document6 pagesFiche 03wsrfcvPas encore d'évaluation
- Fiche 04Document3 pagesFiche 04wsrfcvPas encore d'évaluation
- Corexam 2000Document4 pagesCorexam 2000wsrfcvPas encore d'évaluation
- Cap PiezoDocument11 pagesCap PiezowsrfcvPas encore d'évaluation
- SGI 5 - CGF Bourse - Analyse - Septembre 2019Document18 pagesSGI 5 - CGF Bourse - Analyse - Septembre 2019deldiazePas encore d'évaluation
- Voici Les Avantages Les Et InconvenientsDocument2 pagesVoici Les Avantages Les Et Inconvenientshospitabledoctr53Pas encore d'évaluation
- Gabarit 20pour 20queues 20dDocument3 pagesGabarit 20pour 20queues 20dwlidhaaaPas encore d'évaluation
- LE BUTEUR PDF Du 16/03/2011Document24 pagesLE BUTEUR PDF Du 16/03/2011PDF JournalPas encore d'évaluation
- Asd1 CH6Document14 pagesAsd1 CH6elfidharoua1s3Pas encore d'évaluation
- Stage de 1ere Année LIVRABLE 1: Présentation de L'organisme D'accueilDocument12 pagesStage de 1ere Année LIVRABLE 1: Présentation de L'organisme D'accueilapi-673357128Pas encore d'évaluation
- Ensa C6Document4 pagesEnsa C6Houssame NaimPas encore d'évaluation
- Document (1) OignonsDocument6 pagesDocument (1) OignonsLASSIOPas encore d'évaluation
- Correction de L'évaluationDocument2 pagesCorrection de L'évaluationLudivine MauchausséePas encore d'évaluation
- PHILIPS - DreamStation BiPAP AVAPSDocument2 pagesPHILIPS - DreamStation BiPAP AVAPSHack clashPas encore d'évaluation
- MGP7121 Exercice PERT PDFDocument16 pagesMGP7121 Exercice PERT PDFMarwa LahkimPas encore d'évaluation
- Organigrama INSHSDocument1 pageOrganigrama INSHSlibermeusPas encore d'évaluation
- Analyse-15 Le Marche Des Engrais MinerauxDocument4 pagesAnalyse-15 Le Marche Des Engrais MinerauxEl ZinebPas encore d'évaluation
- UQAM Fiche dinformationDDDocument4 pagesUQAM Fiche dinformationDDandwinkelvinPas encore d'évaluation
- 133554FRDocument47 pages133554FRyacineala90Pas encore d'évaluation
- Catalogo General Apoyos FammsaDocument48 pagesCatalogo General Apoyos FammsarloayzamariacaPas encore d'évaluation
- Essai D'analyse Des Composantes Du Tableau de Bord Ressources Humaines PDFDocument126 pagesEssai D'analyse Des Composantes Du Tableau de Bord Ressources Humaines PDFPierre WoodmanPas encore d'évaluation
- KACIMI EL HASSANI Mounya PDFDocument72 pagesKACIMI EL HASSANI Mounya PDFmohamed laibPas encore d'évaluation
- Baremes Opcoep Remontees MecaniquesDocument17 pagesBaremes Opcoep Remontees MecaniquesStartup AuchecornePas encore d'évaluation
- Expose Du Groupe IiiDocument17 pagesExpose Du Groupe IiiabdoulayePas encore d'évaluation
- Anssi Guide Communication Crise CyberDocument56 pagesAnssi Guide Communication Crise CyberjohnPas encore d'évaluation
- Cas Pratique Sur Le Contrat de VenteDocument4 pagesCas Pratique Sur Le Contrat de VenteEfonPas encore d'évaluation
- 1868 Em25112015 PDFDocument22 pages1868 Em25112015 PDFelmoudjahid_dzPas encore d'évaluation
- Chapitre 2 Application RépartieDocument25 pagesChapitre 2 Application Répartiesafe selmiPas encore d'évaluation
- SIG InitiationDocument55 pagesSIG InitiationmissaouiPas encore d'évaluation
- D - 93 - 609 Modalites Statut Fonction Publique (1993)Document8 pagesD - 93 - 609 Modalites Statut Fonction Publique (1993)SegaAlainCoulibalyPas encore d'évaluation
- Série SILENT-100 DESIGN 3CDocument5 pagesSérie SILENT-100 DESIGN 3CyassinePas encore d'évaluation
- Scenariu Didactic l2 XDocument4 pagesScenariu Didactic l2 XRaluca MihalachePas encore d'évaluation
- Cahier - Des - Charges - APS Ouenghi VFDocument35 pagesCahier - Des - Charges - APS Ouenghi VFIssifouHamdaneAdamPas encore d'évaluation