Vous aimerez peut-être aussi
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Activites Corrigée PDFDocument31 pagesActivites Corrigée PDFKadri MongiPas encore d'évaluation
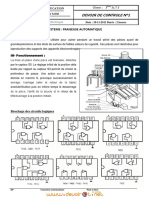
- Devoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachDocument6 pagesDevoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachGTO FFPas encore d'évaluation
- Reporting pilier 3 de solvabilité II: Guide pour la production des QRTD'EverandReporting pilier 3 de solvabilité II: Guide pour la production des QRTPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Buté - 2ème Technique (2012-2013) MR Ben Med MohamedDocument5 pagesDevoir de Synthèse N°2 - Technologie Buté - 2ème Technique (2012-2013) MR Ben Med MohamedRouaissi RidhaPas encore d'évaluation
- 3 Compteur Synchrone 2011 2012Document8 pages3 Compteur Synchrone 2011 2012Mohamed EL MASSOUDIPas encore d'évaluation
- Annexes Mikropascal 1Document6 pagesAnnexes Mikropascal 1Mohamed Ali TaheurPas encore d'évaluation
- DS2016Document6 pagesDS2016Heythem DhaouadiPas encore d'évaluation
- TP 2:programmation en Assembleur: I. ObjectifsDocument4 pagesTP 2:programmation en Assembleur: I. Objectifsyoussef_dabliz100% (1)
- Upload - Résumé Du Cours-Microcontroleurs - 2016-2017Document7 pagesUpload - Résumé Du Cours-Microcontroleurs - 2016-2017Habib Ben AmmarPas encore d'évaluation
- Compteur À Afficheur Numérique À 3 CaractéresDocument18 pagesCompteur À Afficheur Numérique À 3 CaractéresHachemi BhePas encore d'évaluation
- A2 1 Compteurs Integrés 17 18Document11 pagesA2 1 Compteurs Integrés 17 18Oumayma Ben MoussaPas encore d'évaluation
- Architecture Du Microprocesseur 6809 de MotorolaDocument14 pagesArchitecture Du Microprocesseur 6809 de MotorolaPhylipe Rodrigez100% (1)
- Devoir de Révision N2 Dossier Réponses RDocument5 pagesDevoir de Révision N2 Dossier Réponses Rsyrine torjmenPas encore d'évaluation
- CoursMP 1 ETL427Document24 pagesCoursMP 1 ETL427dbPas encore d'évaluation
- RAPPOTDocument10 pagesRAPPOTYahaya MadassirouPas encore d'évaluation
- TP1 4Document22 pagesTP1 4Abderrahmane WrPas encore d'évaluation
- Rapport 2Document16 pagesRapport 2Ayoub TarhouchiPas encore d'évaluation
- Dokumen - Tips - Robot Suiveur de LignepptDocument21 pagesDokumen - Tips - Robot Suiveur de LignepptHiba NacirPas encore d'évaluation
- Compteurs/Décompteurs IntégrésDocument4 pagesCompteurs/Décompteurs IntégrésAli ChourouPas encore d'évaluation
- Cahier de ChargeDocument9 pagesCahier de ChargeEric Dassie100% (1)
- Exposé GROUPE 5 PROGRAMMATION MICROCONTROLEURS AFFICHAGE TEXTEDocument17 pagesExposé GROUPE 5 PROGRAMMATION MICROCONTROLEURS AFFICHAGE TEXTEayodeleprecieux02Pas encore d'évaluation
- TD 2Document5 pagesTD 2adda chariPas encore d'évaluation
- 2 CH Sensor Suhu DS1820 LM35Document6 pages2 CH Sensor Suhu DS1820 LM35ImanuelPas encore d'évaluation
- DS Grafcet Logique Combinatoire CORRECTIONDocument7 pagesDS Grafcet Logique Combinatoire CORRECTIONchaouch.najeh100% (2)
- AVR MCU ProgrammingDocument121 pagesAVR MCU ProgrammingKenji NatsuhiPas encore d'évaluation
- Série Révision.4ScT.Document8 pagesSérie Révision.4ScT.Hichem Hamdi0% (1)
- Nizar ProgrammeDocument29 pagesNizar Programmeiramole med100% (1)
- DP 2Document4 pagesDP 2meriembelhadj2024Pas encore d'évaluation
- Devoir de Contrôle N°3 Climatiseur D'une Voiture 2014 2015 (MR Tarek Elbazmi)Document3 pagesDevoir de Contrôle N°3 Climatiseur D'une Voiture 2014 2015 (MR Tarek Elbazmi)Ridha GouadriaPas encore d'évaluation
- TD1 RepresentationetArithmetiqueDocument4 pagesTD1 RepresentationetArithmetiqueNasriMohsenPas encore d'évaluation
- Model Cours - CopieDocument9 pagesModel Cours - Copieabid alyaniPas encore d'évaluation
- Cours1 Muc Mii m1Document20 pagesCours1 Muc Mii m1Hicham BordjPas encore d'évaluation
- Formation MikropascalDocument69 pagesFormation MikropascalNejib JallouliPas encore d'évaluation
- IMPORTANTDocument7 pagesIMPORTANTYassine AmrPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Électrique Panneau Solaire Panneau Solaire - Bac Technique (2009-2010) Mme Feki FaizaDocument12 pagesDevoir Corrigé de Contrôle N°2 - Génie Électrique Panneau Solaire Panneau Solaire - Bac Technique (2009-2010) Mme Feki FaizaNesrine NouiraPas encore d'évaluation
- Leçon A23-Circuits Combinatoires 2016Document7 pagesLeçon A23-Circuits Combinatoires 2016Aissa IsmailPas encore d'évaluation
- Rapporte Des Travaux Pratiques Les CapteDocument16 pagesRapporte Des Travaux Pratiques Les CapteHachem BelouafiPas encore d'évaluation
- TP2 Asp GBM3-LMDDocument4 pagesTP2 Asp GBM3-LMDDONIA JBELIPas encore d'évaluation
- Modélisme - CNC - Hardware - Contrôleur Chinois TB6560 BleuDocument7 pagesModélisme - CNC - Hardware - Contrôleur Chinois TB6560 BleuStéphane ZsPas encore d'évaluation
- TPN10Document4 pagesTPN10mondherPas encore d'évaluation
- Exercice MIPSDocument3 pagesExercice MIPSbenazizaaya8Pas encore d'évaluation
- TD 2 - Finale - VFF - 2024 - VFFFDocument3 pagesTD 2 - Finale - VFF - 2024 - VFFFdansokomahaPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Électrique - 3ème Technique (2014-2015) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°3 - Génie Électrique - 3ème Technique (2014-2015) MR Raouafi AbdallahAbdelhakim Ebdelli100% (3)
- Application Des Multiplexeurs Et Des DemultiplexeursDocument8 pagesApplication Des Multiplexeurs Et Des DemultiplexeursSaid EchPas encore d'évaluation
- Codeur Decodeur MultiplexeurDocument9 pagesCodeur Decodeur MultiplexeurDame GayePas encore d'évaluation
- Correction TDn°1Document6 pagesCorrection TDn°1Zidi NesimPas encore d'évaluation
- 2023 Manuel TP PIC18F45K22 MPLABX 2Document21 pages2023 Manuel TP PIC18F45K22 MPLABX 2Amine LahlalPas encore d'évaluation
- Mini Projet-MechatronicDocument9 pagesMini Projet-MechatronicFiras KhemakhemPas encore d'évaluation
- TP 1 Etude Arduino UNO 4 1Document13 pagesTP 1 Etude Arduino UNO 4 1Kamal ZeghdarPas encore d'évaluation
- Robot Suiveur de LigneDocument22 pagesRobot Suiveur de Ligneridha annabi100% (1)
- Sequentiel LioDocument50 pagesSequentiel LioamourgloirePas encore d'évaluation
- TD Microcontroleur 2Document25 pagesTD Microcontroleur 2Ismael GhaziPas encore d'évaluation
- Asservissement de Vitesse PID D'un MoteurDocument15 pagesAsservissement de Vitesse PID D'un MoteurMohamed Riyad Boudallaa100% (1)
- Cours 1 4AMRI Circuits ProgrammablesDocument23 pagesCours 1 4AMRI Circuits ProgrammableshamzaPas encore d'évaluation
- Correction Rattrapage MuC MPro 2011Document5 pagesCorrection Rattrapage MuC MPro 2011Bouabdellah AdjloutPas encore d'évaluation
- Theme2 BenkacemDocument11 pagesTheme2 BenkacemMehdi BKPas encore d'évaluation
- DC1 4T Dpe 17 CorrectionDocument4 pagesDC1 4T Dpe 17 Correctiontakecoin767Pas encore d'évaluation
- Devoir de Contôle N2 Electrique (DR)Document3 pagesDevoir de Contôle N2 Electrique (DR)FM HELSENKIPas encore d'évaluation
- 2 ControleThEtPr Modelisation3D VISIODocument5 pages2 ControleThEtPr Modelisation3D VISIOdodoPas encore d'évaluation
- Presentation Cci - Matinale Erp 29 OctobreDocument31 pagesPresentation Cci - Matinale Erp 29 OctobremohamedPas encore d'évaluation
- Louiscroce PratiqueDocument9 pagesLouiscroce PratiquedodoPas encore d'évaluation
- 2 ControleThEtPr Modelisation3D VISIODocument5 pages2 ControleThEtPr Modelisation3D VISIOdodoPas encore d'évaluation
- TD 05Document1 pageTD 05SeVILLA8DzPas encore d'évaluation
- Groupe N°5 Exposé PVTDocument6 pagesGroupe N°5 Exposé PVTSani yaou AbdoullahiPas encore d'évaluation
- Bioinformatique ExamenDocument24 pagesBioinformatique ExamenSôümïã Tôu100% (1)
- Peda2 630 PDFDocument87 pagesPeda2 630 PDFsalvateur2012Pas encore d'évaluation
- Béton Armee AymenDocument47 pagesBéton Armee AymenbensofienPas encore d'évaluation
- TextesDocument16 pagesTextesDOULEZEROPas encore d'évaluation
- Glance 76Document48 pagesGlance 76Cayo YandjuePas encore d'évaluation
- Fraisage S3 3Document4 pagesFraisage S3 3aiglePas encore d'évaluation
- تعبیر شرح نحو میر اردو سوال و جواب PDFDocument168 pagesتعبیر شرح نحو میر اردو سوال و جواب PDFDrJaved KhanPas encore d'évaluation
- French HandoutDocument25 pagesFrench HandoutAlvaro FloresPas encore d'évaluation
- Tsgo Eff Corrige V1 PDFDocument5 pagesTsgo Eff Corrige V1 PDFDon Yassine33% (3)
- QCM Réseau - Partie 3 - WayToLearnXDocument11 pagesQCM Réseau - Partie 3 - WayToLearnXAwonoPas encore d'évaluation
- Jean Houssaye Triange PedagogiqueDocument18 pagesJean Houssaye Triange PedagogiqueL'As De Pique100% (1)
- Atelier DESIGN THINKING - INSAT2023Document26 pagesAtelier DESIGN THINKING - INSAT2023Bochra ArfaouiPas encore d'évaluation
- After Market Catalogue Edition2 2013 FRDocument226 pagesAfter Market Catalogue Edition2 2013 FRdiraw100% (2)
- SDH (Système Du Design Humain) - 4typesDocument15 pagesSDH (Système Du Design Humain) - 4typesExperience Electrique100% (12)
- Adjectif Qualificatif cm1 45 4 01Document2 pagesAdjectif Qualificatif cm1 45 4 01mirelutza86Pas encore d'évaluation
- EMD1314Document5 pagesEMD1314mohammed8nizarPas encore d'évaluation
- Trape 3Document6 pagesTrape 3Istvan MadacsyPas encore d'évaluation
- Le Secret de La Richesse - Recherche Google 3Document1 pageLe Secret de La Richesse - Recherche Google 3Hamed SaidPas encore d'évaluation
- Resumé HistoireDocument11 pagesResumé HistoireOlfaPas encore d'évaluation
- Exercices D'électrotechnique (Transformateur)Document34 pagesExercices D'électrotechnique (Transformateur)belilimane180Pas encore d'évaluation
- 25goutte A GoutteDocument4 pages25goutte A GoutteDJIDJIKPas encore d'évaluation
- SSFR2009 03Document48 pagesSSFR2009 03Walid OzPas encore d'évaluation
- CI102 Acidite Boisson ColaDocument16 pagesCI102 Acidite Boisson ColaChrist AngePas encore d'évaluation
- Dzi CV Hie OtheroneDocument7 pagesDzi CV Hie OtheronezeroldPas encore d'évaluation
- Equilibres Doxydo-RéductionDocument42 pagesEquilibres Doxydo-Réductionlahcen essPas encore d'évaluation
- Tumeurs UrothelialesDocument40 pagesTumeurs UrothelialesAntoine AILLOUDPas encore d'évaluation
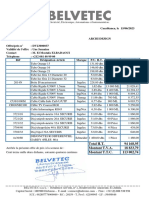
- Devis ARCHIDESIGN - 230531 - 3Document1 pageDevis ARCHIDESIGN - 230531 - 3yaaninvestPas encore d'évaluation
- Cours Exploitation PortuaireDocument75 pagesCours Exploitation PortuaireMaher FriouiPas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Le marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentD'EverandLe marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentPas encore d'évaluation
- Stratégie d'Investissement en Crypto-monnaie: Comment Devenir Riche Avec les Crypto-monnaiesD'EverandStratégie d'Investissement en Crypto-monnaie: Comment Devenir Riche Avec les Crypto-monnaiesÉvaluation : 3.5 sur 5 étoiles3.5/5 (11)
- Le money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneD'EverandLe money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneÉvaluation : 3 sur 5 étoiles3/5 (3)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Python Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.D'EverandPython Offensif : Le guide du débutant pour apprendre les bases du langage Python et créer des outils de hacking.Pas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)