Vous aimerez peut-être aussi
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Exercice Equiprojectivit Machine Crire LveDocument3 pagesExercice Equiprojectivit Machine Crire Lvespectrum66Pas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Unité Flexible de Production - 3ème Technique (2014-2015) MR Elhadhri Ahmed PDFDocument9 pagesDevoir de Contrôle N°1 - Technologie Unité Flexible de Production - 3ème Technique (2014-2015) MR Elhadhri Ahmed PDFHichem HamdiPas encore d'évaluation
- Corrige Des Exercices de CotationDocument12 pagesCorrige Des Exercices de CotationAbderrahmane AzPas encore d'évaluation
- FR 161215 153045 ME aTDcybDocument14 pagesFR 161215 153045 ME aTDcybelking gingstarsPas encore d'évaluation
- Transmission Par Lien FlexibleDocument3 pagesTransmission Par Lien FlexibleYahya AidaraPas encore d'évaluation
- Devoir de Controle n1 Bac MecaniqueDocument3 pagesDevoir de Controle n1 Bac Mecaniqueأحمد رائد الفضاءPas encore d'évaluation
- Corrigé Bac Pro MEI 2020Document14 pagesCorrigé Bac Pro MEI 2020HakobyanPas encore d'évaluation
- Cours Cinmatique MVT Plan EquiprojectivitDocument2 pagesCours Cinmatique MVT Plan EquiprojectivitsallsmartPas encore d'évaluation
- Corrigé Exercice 1 - BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.Document12 pagesCorrigé Exercice 1 - BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.MATOUMBA PAULINPas encore d'évaluation
- Poulie Et Courroie1Document8 pagesPoulie Et Courroie1Boris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Devoir de Controle N1-1AS-2021-hache ViandesDocument3 pagesDevoir de Controle N1-1AS-2021-hache ViandesSaber Maalaoui0% (1)
- TD1-Dispositif de SerrageDocument6 pagesTD1-Dispositif de SerrageAlbertø Là VïtëssëPas encore d'évaluation
- CC1 - Octobre 2019-Touret - Meuler 2STE1Document4 pagesCC1 - Octobre 2019-Touret - Meuler 2STE1ESSOME ESSOME OLIVIER STEPHANE100% (1)
- La Chaîne D'énergie - Cours - ProfDocument2 pagesLa Chaîne D'énergie - Cours - ProfAzerty Delegfr100% (1)
- Tableau Des Shemas MecaniquesDocument1 pageTableau Des Shemas MecaniquesntabPas encore d'évaluation
- Devoir de Controle N°2: Systemede DecoupageDocument3 pagesDevoir de Controle N°2: Systemede DecoupageElafif HamdiPas encore d'évaluation
- Devoir de Synthèse N°1 2007 2008 (Région Kairouan)Document15 pagesDevoir de Synthèse N°1 2007 2008 (Région Kairouan)Piere Ebrahim50% (2)
- TD1 EngrenagesDocument6 pagesTD1 EngrenagesYoussefPas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- Exercice ConvoyeurDocument6 pagesExercice ConvoyeurHajar AmalouPas encore d'évaluation
- Statique Graphique 4 Forces CulmanDocument14 pagesStatique Graphique 4 Forces CulmanmohammedPas encore d'évaluation
- 02 Bac 2008 Contrôle CorrigéDocument12 pages02 Bac 2008 Contrôle CorrigéMohamed AbedPas encore d'évaluation
- Cours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFDocument8 pagesCours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFANDAHMOUPas encore d'évaluation
- Seie 4 Grafcet 3emeDocument3 pagesSeie 4 Grafcet 3emeSoumeya MachtaPas encore d'évaluation
- Schemas Cinematiques + CorrigesDocument5 pagesSchemas Cinematiques + Corrigesjamal50% (2)
- Cotes Tolerancees EleveDocument2 pagesCotes Tolerancees Elevesamir ghebouliPas encore d'évaluation
- TD Compresseur PR PDFDocument6 pagesTD Compresseur PR PDFzohirPas encore d'évaluation
- L'ABAQUE 2nd Méca Élève, PDFDocument88 pagesL'ABAQUE 2nd Méca Élève, PDFESSOME ESSOME OLIVIER STEPHANE100% (3)
- Cour 1 PDFDocument17 pagesCour 1 PDFsalwa BDPas encore d'évaluation
- Cours EtancheiteDocument4 pagesCours EtancheiteAbdou Lahat NdiayePas encore d'évaluation
- TD Statique Graphique - Lève Moto Hydraulique CorrigéDocument2 pagesTD Statique Graphique - Lève Moto Hydraulique CorrigéThierry MarvynPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
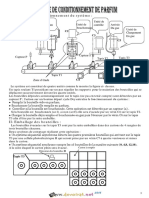
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Exercice Ajustements EleveDocument4 pagesExercice Ajustements Elevesamir ghebouliPas encore d'évaluation
- 1-Montage DémontageDocument14 pages1-Montage DémontageMohamed Amin MnasriPas encore d'évaluation
- Chapitre II Grafcet 1 PDFDocument11 pagesChapitre II Grafcet 1 PDFChakib Titoussa100% (1)
- Ajustement Cours ProfDocument6 pagesAjustement Cours Profakou100% (1)
- Devoir de Contrôle N°1 - Génie Électrique - Bac TechniqueDocument7 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac TechniqueAlaeddine Ben HassenPas encore d'évaluation
- Gamme D Usinage de La Piece 2Document3 pagesGamme D Usinage de La Piece 2Med Amine HattakiPas encore d'évaluation
- Met T 31 TDDocument5 pagesMet T 31 TDspectrum66Pas encore d'évaluation
- Correction Du Devoir de Contrôle N°1 - Technologie - 2ème SC (2009-2010) WWW - Lycee-NetDocument4 pagesCorrection Du Devoir de Contrôle N°1 - Technologie - 2ème SC (2009-2010) WWW - Lycee-NetMoha BenhPas encore d'évaluation
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- Train Valseur Dernière PageDocument6 pagesTrain Valseur Dernière PageNaoufel Fares100% (1)
- TD Avant RattrapageDocument6 pagesTD Avant RattrapageBakary Biro100% (1)
- Potence A Trant Sur MurDocument3 pagesPotence A Trant Sur Murمحمد الأمين شرفاوي67% (3)
- Cours Courroies Chaines PRDocument2 pagesCours Courroies Chaines PRmasteratsii100% (1)
- Devoir N2 Cotation Fonctionelle 2 As Griffe 2012Document4 pagesDevoir N2 Cotation Fonctionelle 2 As Griffe 2012haykel71Pas encore d'évaluation
- Echelle de PompierDocument3 pagesEchelle de PompierOUSMANE DIALLOPas encore d'évaluation
- 3 DS2 - DT 2020 - 2021Document5 pages3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- Chapitre 3 Frottement AdherenceDocument6 pagesChapitre 3 Frottement AdherencezouhairPas encore d'évaluation
- Devoir N2 Cotation Bras 2 ASDocument2 pagesDevoir N2 Cotation Bras 2 ASRizouga AbdallahPas encore d'évaluation
- SaadDocument12 pagesSaadBoukdir Saad Din0% (1)
- Devoir de Synthèse N°3 2009 2010 (Ghnimi Noura (Gharbi Jamel Eddine)Document6 pagesDevoir de Synthèse N°3 2009 2010 (Ghnimi Noura (Gharbi Jamel Eddine)Khaled AamiraPas encore d'évaluation
- 1 DS de Statique Graphique Et Analytique - PelleteuseDocument4 pages1 DS de Statique Graphique Et Analytique - PelleteuseMohamed NaciriPas encore d'évaluation
- (Les) (TD) Joint de CardanDocument2 pages(Les) (TD) Joint de CardanDAKING GAMING100% (1)
- Exercice Ajustements eDocument3 pagesExercice Ajustements eMohsen SaidiPas encore d'évaluation
- Sujet - Lève Personne - ÉlèveDocument10 pagesSujet - Lève Personne - ÉlèveremivsnPas encore d'évaluation
- BAC 2013 SI Normale STM PDFDocument18 pagesBAC 2013 SI Normale STM PDFyassine yazidiPas encore d'évaluation
- SujetFinalTirage AMDocument14 pagesSujetFinalTirage AMSoulaiman HarrakPas encore d'évaluation
- 2014 Normale Sujet PDFDocument18 pages2014 Normale Sujet PDFOtman OtoPas encore d'évaluation
- 2009 BAC SI Normale STM Corrigé PDFDocument5 pages2009 BAC SI Normale STM Corrigé PDFyassine yazidiPas encore d'évaluation
- BAC 2011 SI Normale STM PDFDocument16 pagesBAC 2011 SI Normale STM PDFyassine yazidiPas encore d'évaluation
- 2008 Normal SujetDocument16 pages2008 Normal SujetAbdelmoghit Idhsaine100% (1)
- Normale 2012 PDFDocument16 pagesNormale 2012 PDFGuiliassPas encore d'évaluation
- BAC 2018 Sciences de Lingénieur STM PDFDocument17 pagesBAC 2018 Sciences de Lingénieur STM PDFAbdelali YacoubiPas encore d'évaluation
- SOLIDWORKS Doc-Prof MOUKHTARI 1STM PDFDocument7 pagesSOLIDWORKS Doc-Prof MOUKHTARI 1STM PDFyassine yazidiPas encore d'évaluation
- Série-5-Suite-1bac-Sc - F PDFDocument1 pageSérie-5-Suite-1bac-Sc - F PDFyassine yazidiPas encore d'évaluation
- Correction de L Exercice D ApplicationDocument13 pagesCorrection de L Exercice D ApplicationJoris KeršanskasPas encore d'évaluation
- Cours Prof Filetage TardageDocument4 pagesCours Prof Filetage Tardageyassine yazidiPas encore d'évaluation
- EXERCICES Comportement Global Dun Circuit ÉlectriqueDocument4 pagesEXERCICES Comportement Global Dun Circuit Électriqueyassine yazidi100% (1)
- Cour MeDocument54 pagesCour Meyassine yazidiPas encore d'évaluation
- Gestion de Production Doc-ÉlèveDocument7 pagesGestion de Production Doc-Élèveyassine yazidiPas encore d'évaluation
- Quantité de Matière Dans LDocument1 pageQuantité de Matière Dans Lyassine yazidiPas encore d'évaluation
- الفرض الأول في الفيزياء والكيمياء المسلك الدولي الأولى باك علوم رياضية 1)Document2 pagesالفرض الأول في الفيزياء والكيمياء المسلك الدولي الأولى باك علوم رياضية 1)KERARMICHAIMAE100% (3)
- Coupes Et Sections TDDocument6 pagesCoupes Et Sections TDyassine yazidiPas encore d'évaluation
- CONVERTIRelvDocument5 pagesCONVERTIRelvyassine yazidiPas encore d'évaluation
- TD Eq Chim 1ereDocument14 pagesTD Eq Chim 1ereyassine yazidiPas encore d'évaluation
- CONVERTIRelvDocument5 pagesCONVERTIRelvyassine yazidiPas encore d'évaluation
- Registre D'élevage Gratuit Plateforme Du MielDocument12 pagesRegistre D'élevage Gratuit Plateforme Du Mielmas.eric34Pas encore d'évaluation
- Le Marketing Digital Pour Les NulsDocument453 pagesLe Marketing Digital Pour Les NulsAMINEPas encore d'évaluation
- NXO 5v7ds7NU PDFDocument69 pagesNXO 5v7ds7NU PDFChristophe GarnierPas encore d'évaluation
- La Création de ValeurDocument68 pagesLa Création de Valeursene seydina mouhamedPas encore d'évaluation
- Plastiques TechniquesDocument1 pagePlastiques Techniquesbagueneau YOUTUBEPas encore d'évaluation
- Théorie Des MachinesDocument20 pagesThéorie Des MachinesJeanne Varenne EmvutouPas encore d'évaluation
- PédopsyDocument3 pagesPédopsyTASMINE HAMZAPas encore d'évaluation
- French Gr5 Final RevDocument5 pagesFrench Gr5 Final Revezzeldin3khaterPas encore d'évaluation
- Antoche 1497Document21 pagesAntoche 1497Flynders PetryePas encore d'évaluation
- JumiaDocument3 pagesJumiakhalidPas encore d'évaluation
- 2les NavigateursDocument2 pages2les NavigateursImane TlmPas encore d'évaluation
- Elaboration Et Caracterisation Des Compo 20150413142733 582136Document5 pagesElaboration Et Caracterisation Des Compo 20150413142733 582136Fox FouPas encore d'évaluation
- Fonction Convertir Machines Synchrones Triphases CoursDocument5 pagesFonction Convertir Machines Synchrones Triphases CoursdddddPas encore d'évaluation
- Osp 1168-35-4 La Notion de Projet en Psychologie de L OrientationDocument13 pagesOsp 1168-35-4 La Notion de Projet en Psychologie de L OrientationMus OubPas encore d'évaluation
- Les Produits D EntretienDocument3 pagesLes Produits D EntretienSandrine CharinPas encore d'évaluation
- Convention PFE EntrepriseenTunisieDocument3 pagesConvention PFE EntrepriseenTunisieChaima BelhediPas encore d'évaluation
- La Motivation Des Élèves de Formation ProfessionnelleDocument22 pagesLa Motivation Des Élèves de Formation ProfessionnelleOlsen MalagaPas encore d'évaluation
- Cours 4 Introduction À La Génomique 2021Document10 pagesCours 4 Introduction À La Génomique 2021fsxnsstoaehkbhlzygPas encore d'évaluation
- Ingénierie - Le Cycle en VDocument3 pagesIngénierie - Le Cycle en VbommobPas encore d'évaluation
- Sujet 2022Document4 pagesSujet 2022baha brahmiPas encore d'évaluation
- Projet PFE01Document127 pagesProjet PFE01soukaPas encore d'évaluation
- 425 914 1 SMDocument10 pages425 914 1 SMkami ouachemPas encore d'évaluation
- Fiche ROME BrasseurDocument5 pagesFiche ROME BrasseuryannplmrPas encore d'évaluation
- Finances Publiques - Raya ChoubaniDocument37 pagesFinances Publiques - Raya Choubaniمنير بعكةPas encore d'évaluation
- Pont Mixte FINALDocument26 pagesPont Mixte FINALĐíßMohammedRiadPas encore d'évaluation
- Exercices Is LM BPDocument6 pagesExercices Is LM BPDachka Ridore100% (1)
- Les Points Clé Pour Bien Écrire.Document60 pagesLes Points Clé Pour Bien Écrire.HanKethyaneth100% (1)
- Trading Price Action TRENDSDocument53 pagesTrading Price Action TRENDSKOUASSI KOFFI JEAN DE CAPISTRANPas encore d'évaluation
- Cours No 10-Ostèologie (Suite)Document7 pagesCours No 10-Ostèologie (Suite)Feriel FerielPas encore d'évaluation
- Exposé Réorganisation Du CapitalfinalDocument30 pagesExposé Réorganisation Du CapitalfinalAdil BentalebPas encore d'évaluation