Vous aimerez peut-être aussi
- Devoir de Controle n1 Bac MecaniqueDocument3 pagesDevoir de Controle n1 Bac Mecaniqueأحمد رائد الفضاءPas encore d'évaluation
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoPas encore d'évaluation
- Invers 2020Document3 pagesInvers 2020Mortadha RabahPas encore d'évaluation
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocument4 pagesDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitPas encore d'évaluation
- CAP Zéro Coupe Tube - 2020Document4 pagesCAP Zéro Coupe Tube - 2020Rodolphe SounouPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- Leçon 4Document8 pagesLeçon 4TarekMostaphaPas encore d'évaluation
- 1ère Année Secondaire 0708 - Devoir de Synthése N°3Document5 pages1ère Année Secondaire 0708 - Devoir de Synthése N°3Kamel TayahiPas encore d'évaluation
- BEP - ET - Poitiers - 1998 - Page 3 - 4 - PRDocument2 pagesBEP - ET - Poitiers - 1998 - Page 3 - 4 - PRNassim Rabaoui100% (1)
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Résumé-De-Cours Dessin D'ensembleDocument9 pagesRésumé-De-Cours Dessin D'ensembleatika kabouyaPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFDocument10 pagesDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaPas encore d'évaluation
- Devoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument3 pagesDevoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de Robotyassine zitouni100% (1)
- Devoir+de+controle+N1-1 BackupDocument5 pagesDevoir+de+controle+N1-1 BackupRasmi Baananou0% (1)
- 1a Corr Tec 2000Document8 pages1a Corr Tec 2000becemPas encore d'évaluation
- 2ti ds1 2019Document4 pages2ti ds1 2019Besbes ZiedPas encore d'évaluation
- Devoir de Synthese #2: Travail DemandéDocument4 pagesDevoir de Synthese #2: Travail DemandéBouabdellaoui saif ennasr100% (1)
- Saber DC N1 1S3 2021 2022Document4 pagesSaber DC N1 1S3 2021 2022Adam BensaidPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi TarekDocument4 pagesDevoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi Tarekhayet debbichPas encore d'évaluation
- 27 Lubrification ÉtanchéitéDocument4 pages27 Lubrification ÉtanchéitéAnonymous Zu0p0SWg7Pas encore d'évaluation
- Partie 3 Etude Des SystemesDocument52 pagesPartie 3 Etude Des SystemesMAD-ALLAH OryaitaPas encore d'évaluation
- Cours Cotation FonctionnelleDocument4 pagesCours Cotation Fonctionnellelou louPas encore d'évaluation
- Enrouleur de RessortDocument5 pagesEnrouleur de RessortMountaser Bouaoud100% (1)
- N'est Autorisé Année MR:: Mise MarcheDocument5 pagesN'est Autorisé Année MR:: Mise MarchebejaouiPas encore d'évaluation
- Ch5 Guidage en TranslationDocument14 pagesCh5 Guidage en TranslationAB lifestylePas encore d'évaluation
- Epreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalDocument7 pagesEpreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalSaliouPas encore d'évaluation
- devoir2AS Cotation Manivelle2Document2 pagesdevoir2AS Cotation Manivelle2samsoum2004295250% (2)
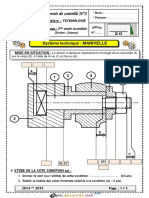
- Devoir de Contrôle N°2 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiDocument3 pagesDevoir de Contrôle N°2 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiAmeur AdemePas encore d'évaluation
- 8fa9r GriffeDocument2 pages8fa9r GriffeSimo StitPas encore d'évaluation
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Sujet BEPDocument6 pagesSujet BEPMamadou GassamaPas encore d'évaluation
- Technique PDFDocument23 pagesTechnique PDFAnonymous brJQnGr1kPas encore d'évaluation
- Les Filetages (Corrigé)Document25 pagesLes Filetages (Corrigé)masteratsii100% (2)
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Devoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaDocument4 pagesDevoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaGalena PrincePas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- Machine de Debitage de CeinturesDocument14 pagesMachine de Debitage de CeinturesGuiliass100% (1)
- Guidage en TranslationDocument33 pagesGuidage en TranslationMohamed SaifPas encore d'évaluation
- (Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeDocument4 pages(Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeMarouen MekkiPas encore d'évaluation
- TP Treuil EleveDocument6 pagesTP Treuil ElevemidounPas encore d'évaluation
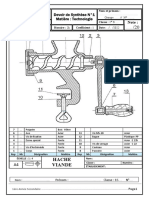
- Devoir de Controle N1-1AS-2021-hache ViandesDocument3 pagesDevoir de Controle N1-1AS-2021-hache ViandesSaber Maalaoui0% (1)
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaPas encore d'évaluation
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- DS N°1-1AS-2020-hache+viandes+Document4 pagesDS N°1-1AS-2020-hache+viandes+Youssef Aouadi0% (1)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had0% (1)
- DS1-DT-Poste de Mise en GodetDocument4 pagesDS1-DT-Poste de Mise en GodetMouad Memni100% (1)
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- LectureDocument4 pagesLectureRahma BaccarPas encore d'évaluation
- Etau de BricolageDocument2 pagesEtau de BricolagehamrouniPas encore d'évaluation
- CC1 - Octobre 2019-Touret - Meuler 2STE1Document4 pagesCC1 - Octobre 2019-Touret - Meuler 2STE1ESSOME ESSOME OLIVIER STEPHANE100% (1)
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
- DcN°3-1ère-hachoir-2020-2021 Un ÉlèveDocument4 pagesDcN°3-1ère-hachoir-2020-2021 Un ÉlèveAdam BensaidPas encore d'évaluation
- 4 SC Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 SC Tech-dt-11-12-Systeme Automatique de MoulageezzinePas encore d'évaluation
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (1)
- 8fap4-Bride HydrauliqueDocument2 pages8fap4-Bride HydrauliquemohsenPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Devoir de Synthèse N°1 2010 2011 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2010 2011 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Dhahri Salah)Document6 pagesDevoir de Synthèse N°1 2012 2013 (Dhahri Salah)Youssef CherniPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Devoir de Synthèse N°1 2013 2014 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2013 2014 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTDocument5 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTDocument5 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTYoussef CherniPas encore d'évaluation
- P A P P: Oste Utomatique de Einture de ArabolesDocument15 pagesP A P P: Oste Utomatique de Einture de ArabolesYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Système Automatique de Sciage - 3ème Technique (2010-2011) MR Heni AbdellatifDocument4 pagesDevoir de Synthèse N°1 - Technologie Système Automatique de Sciage - 3ème Technique (2010-2011) MR Heni AbdellatifYoussef CherniPas encore d'évaluation
- Amdec Ii PDFDocument5 pagesAmdec Ii PDFAchraf BouZara100% (1)
- TP3 MathsDocument2 pagesTP3 MathsAyadi AyaPas encore d'évaluation
- 2021 03 Metro SI Sujet2 ExoC NuisancesSonoresDocument3 pages2021 03 Metro SI Sujet2 ExoC NuisancesSonoresS2wtzPas encore d'évaluation
- Corrige La Reunion Spe J1 28 Mars 2023 FH 2Document7 pagesCorrige La Reunion Spe J1 28 Mars 2023 FH 2gab.iwibanPas encore d'évaluation
- Cours de Procédés ToposDocument23 pagesCours de Procédés Topose.walid3rPas encore d'évaluation
- Meshing - 16 01 2017Document33 pagesMeshing - 16 01 2017Aymane MouallemPas encore d'évaluation
- Fiche Pédagogique TCS 230411 062553Document47 pagesFiche Pédagogique TCS 230411 062553Sino SimoPas encore d'évaluation
- Note de Calcul Cuve 9m3Document37 pagesNote de Calcul Cuve 9m3anouarchiba7967% (3)
- TD1-Complement Sur Le Calcul Vectoriel-1s1 PDFDocument8 pagesTD1-Complement Sur Le Calcul Vectoriel-1s1 PDFKhadidiatou MbenguePas encore d'évaluation
- Trigo SpheriqueDocument8 pagesTrigo SpheriqueMargot SchwindlerPas encore d'évaluation
- Ds 02 Diffraction Interference DopplerDocument2 pagesDs 02 Diffraction Interference DopplerWendy TillemontPas encore d'évaluation
- AtmosphereDocument31 pagesAtmosphereAnime StagePas encore d'évaluation
- TP TD Géothermie - 2018 PDFDocument8 pagesTP TD Géothermie - 2018 PDFjjjnhjjhj ijiPas encore d'évaluation
- Fond Prof 2019-2020 PDFDocument133 pagesFond Prof 2019-2020 PDFMomar ThiobanePas encore d'évaluation
- Chapitre 2Document6 pagesChapitre 2Monkey D luffyPas encore d'évaluation
- Cours1 2020-2021Document23 pagesCours1 2020-2021Mohamed El MassoudiPas encore d'évaluation
- Conducteurs Et Câbles - CopieDocument101 pagesConducteurs Et Câbles - CopieYassin oukessouPas encore d'évaluation
- Série TD 1 Compléments Mathématiques Physique1Document7 pagesSérie TD 1 Compléments Mathématiques Physique1big bossPas encore d'évaluation
- TP Spe Serie 2 3 Structurel Dynamique CapsuleuseDocument2 pagesTP Spe Serie 2 3 Structurel Dynamique CapsuleuseAlexandre LamPas encore d'évaluation
- Systeme de Securite Incendie: Rapport D'Associativite #Da 15 00 02 BDocument13 pagesSysteme de Securite Incendie: Rapport D'Associativite #Da 15 00 02 BISGEPas encore d'évaluation
- Commande Par Mode Hybride111Document13 pagesCommande Par Mode Hybride111Muhammad BneijaraPas encore d'évaluation
- Bac Février 2023Document15 pagesBac Février 2023Matthew mikaPas encore d'évaluation
- La Base de L'électricitéDocument112 pagesLa Base de L'électricitéLarabihotmail.fr LarabiPas encore d'évaluation
- Énergie Cinétique de RotationDocument12 pagesÉnergie Cinétique de RotationYale HongPas encore d'évaluation
- NF P 98-200-7 - Déflexion Au CurviamètreDocument9 pagesNF P 98-200-7 - Déflexion Au CurviamètreMerlin BinsangouPas encore d'évaluation
- Alge BreDocument61 pagesAlge BreLarbi BadrourPas encore d'évaluation
- 0460 447 176 FRDocument22 pages0460 447 176 FRrufin rufin rufinPas encore d'évaluation
- Essais de Durete Et Preparation DechantillonsDocument12 pagesEssais de Durete Et Preparation DechantillonsSoufiane ElakredarPas encore d'évaluation
- Les Contrôles Méthodes Thermiques Et Thermomécaniques 2009-2014Document104 pagesLes Contrôles Méthodes Thermiques Et Thermomécaniques 2009-2014natalie belchue100% (5)
- Catherine Chevalley La Physique de HeideggerDocument24 pagesCatherine Chevalley La Physique de HeideggerHv13 l'enfant EsckobaPas encore d'évaluation