Vous aimerez peut-être aussi
- Examen FF V2 2016 Corrigé PDFDocument10 pagesExamen FF V2 2016 Corrigé PDFYassin Belkacem0% (1)
- Corrige Technique Controle2018 PDFDocument31 pagesCorrige Technique Controle2018 PDFHamami AymenPas encore d'évaluation
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Bousnina100% (1)
- 05-Notion de FiletageDocument8 pages05-Notion de FiletagedayangPas encore d'évaluation
- Le Glock P. FALEMPINDocument32 pagesLe Glock P. FALEMPINhasan bishPas encore d'évaluation
- Bois PDFDocument68 pagesBois PDFFaycal CevPas encore d'évaluation
- 3-Devoir+de+synthese +N1-2AS-2021Document4 pages3-Devoir+de+synthese +N1-2AS-2021amri mohamedPas encore d'évaluation
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- Nrc014 Transmission Puissance Courroies ChainesDocument4 pagesNrc014 Transmission Puissance Courroies ChainesFilaliAbderrahimPas encore d'évaluation
- Devoir de Controle N2-1as-2023-Etau de CentrageDocument4 pagesDevoir de Controle N2-1as-2023-Etau de CentrageMannai IslemPas encore d'évaluation
- CAP Zéro Coupe Tube - 2020Document4 pagesCAP Zéro Coupe Tube - 2020Rodolphe SounouPas encore d'évaluation
- Correction Devoir+de+Synthese+N1 1AS 2019 VéDocument5 pagesCorrection Devoir+de+Synthese+N1 1AS 2019 VéMustafa Semmaa65% (17)
- Logique Séquentielle: Compteurs Intégrés AsynchronesDocument16 pagesLogique Séquentielle: Compteurs Intégrés AsynchronesbejaouiPas encore d'évaluation
- Devoir: Poste de deDocument5 pagesDevoir: Poste de debejaouiPas encore d'évaluation
- Devoir: Poste de deDocument5 pagesDevoir: Poste de debejaouiPas encore d'évaluation
- Normale Corigé 2012 PDFDocument8 pagesNormale Corigé 2012 PDFGuiliassPas encore d'évaluation
- 27 Lubrification ÉtanchéitéDocument4 pages27 Lubrification ÉtanchéitéAnonymous Zu0p0SWg7Pas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Fabory Catalog PDFDocument1 602 pagesFabory Catalog PDFsamiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi TarekDocument4 pagesDevoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi Tarekhayet debbichPas encore d'évaluation
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielPas encore d'évaluation
- Devoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument3 pagesDevoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de Robotyassine zitouni100% (1)
- 1ère Année Secondaire 0708 - Devoir de Synthése N°3Document5 pages1ère Année Secondaire 0708 - Devoir de Synthése N°3Kamel TayahiPas encore d'évaluation
- Devoir de Controle N° 3 - DTDocument2 pagesDevoir de Controle N° 3 - DTArfaoui AymenPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaPas encore d'évaluation
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Dissier TechniqueDocument5 pagesDissier Techniquentab50% (2)
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFTitan CR YZPas encore d'évaluation
- Devoir de Controle N°2: Systemede DecoupageDocument3 pagesDevoir de Controle N°2: Systemede DecoupageElafif HamdiPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoPas encore d'évaluation
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinPas encore d'évaluation
- Ds 2 Trim 3 Techmars 2012Document7 pagesDs 2 Trim 3 Techmars 2012Nidhal AbidiPas encore d'évaluation
- Vis EcrouDocument31 pagesVis Ecrouwissal khammeriPas encore d'évaluation
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- DS3 - 2015 - 2016 FinaleDocument9 pagesDS3 - 2015 - 2016 FinaleRidha ManaaPas encore d'évaluation
- 1 Dossier TechniqueDocument6 pages1 Dossier TechniqueChokri AtefPas encore d'évaluation
- BEP - ET - Poitiers - 1998 - Page 3 - 4 - PRDocument2 pagesBEP - ET - Poitiers - 1998 - Page 3 - 4 - PRNassim Rabaoui100% (1)
- DT1 2020 Mechanical R2018Document7 pagesDT1 2020 Mechanical R2018Fethi BenmassoudePas encore d'évaluation
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 pagesDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresPas encore d'évaluation
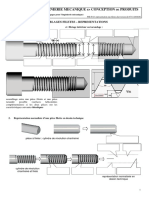
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- TechniqueDocument8 pagesTechniqueFredj Kriaa100% (2)
- Dossier TechniqueDocument8 pagesDossier Techniquebenchikh lindaPas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Saber DC N1 1S3 2021 2022Document4 pagesSaber DC N1 1S3 2021 2022Adam BensaidPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiOthman TmarPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- Invers 2020Document3 pagesInvers 2020Mortadha RabahPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Info (2007-2008) MR Toumi TaherDocument4 pagesDevoir de Synthèse N°1 - Technologie - 2ème Info (2007-2008) MR Toumi TaherSakkat Oussama100% (1)
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- DTDocument3 pagesDTMrnadhir MecaniquePas encore d'évaluation
- Cours Composition de Mouvement de Vitesse LvesDocument5 pagesCours Composition de Mouvement de Vitesse LvesziedttPas encore d'évaluation
- DS1-DT-Poste de Mise en GodetDocument4 pagesDS1-DT-Poste de Mise en GodetMouad Memni100% (1)
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- 1a Corr Tec 2000Document8 pages1a Corr Tec 2000becemPas encore d'évaluation
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocument4 pagesDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitPas encore d'évaluation
- TD Leve MotoDocument4 pagesTD Leve Motoelyes hamani100% (1)
- devoir2AS Cotation Manivelle2Document2 pagesdevoir2AS Cotation Manivelle2samsoum2004295250% (2)
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BDocument20 pagesCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniquePas encore d'évaluation
- Examens de Fin de Formation TS ESA 2007 Pratique Tous Les Variantes WWW Cours-Electromecanique ComDocument25 pagesExamens de Fin de Formation TS ESA 2007 Pratique Tous Les Variantes WWW Cours-Electromecanique ComSamir2020100% (1)
- Devoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFDocument15 pagesDevoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- Moteurs Asynchrones Triphasés: PrésentationDocument34 pagesMoteurs Asynchrones Triphasés: Présentationbejaoui100% (1)
- Rapport PFe CoorectionDocument62 pagesRapport PFe CoorectionbejaouiPas encore d'évaluation
- MG QCMDocument4 pagesMG QCMbejaouiPas encore d'évaluation
- Logique Combinatoire: Les Circuits Intégrés CombinatoiresDocument30 pagesLogique Combinatoire: Les Circuits Intégrés CombinatoiresbejaouiPas encore d'évaluation
- Les Amplificateurs Lineaires Integres: L A L IDocument21 pagesLes Amplificateurs Lineaires Integres: L A L IbejaouiPas encore d'évaluation
- Notions D'Asservissement Linéaire: Définition D'Un Système Asservi Schéma FonctionnelDocument22 pagesNotions D'Asservissement Linéaire: Définition D'Un Système Asservi Schéma FonctionnelbejaouiPas encore d'évaluation
- Compteurs Intégrés Synchrones: Ise en SituationDocument24 pagesCompteurs Intégrés Synchrones: Ise en SituationbejaouiPas encore d'évaluation
- Synthèse: CoefDocument5 pagesSynthèse: CoefbejaouiPas encore d'évaluation
- S U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en CartonDocument7 pagesS U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en Cartonbejaoui100% (1)
- Variateurs de Vitesse Pour Moteurs Asynchrones: FonctionsDocument28 pagesVariateurs de Vitesse Pour Moteurs Asynchrones: FonctionsbejaouiPas encore d'évaluation
- Énie Lectrique: Anuel de OursDocument7 pagesÉnie Lectrique: Anuel de OursbejaouiPas encore d'évaluation
- Rap 001Document100 pagesRap 001bejaouiPas encore d'évaluation
- Formation Sur Les Automates Programmables Niveau I: CotusemDocument85 pagesFormation Sur Les Automates Programmables Niveau I: CotusembejaouiPas encore d'évaluation
- La Liaison Série RS232Document45 pagesLa Liaison Série RS232bejaouiPas encore d'évaluation
- Cours Systèmes SED ProfDocument5 pagesCours Systèmes SED ProfbejaouiPas encore d'évaluation
- Quelle(s) Technologie(s) de Communications Pour Les Projets de Smart-Metering - BearingPoint FranceDocument11 pagesQuelle(s) Technologie(s) de Communications Pour Les Projets de Smart-Metering - BearingPoint FrancebejaouiPas encore d'évaluation
- XbeeDocument26 pagesXbeebejaouiPas encore d'évaluation
- Automate ProgrammableDocument26 pagesAutomate ProgrammablebejaouiPas encore d'évaluation
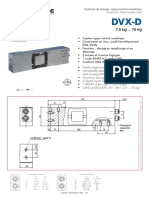
- FT DVX D FeDocument4 pagesFT DVX D FebejaouiPas encore d'évaluation
- 2015 HorreinDocument194 pages2015 HorreinbejaouiPas encore d'évaluation
- 2 Liaisons Élémentaires CorrigéDocument2 pages2 Liaisons Élémentaires Corrigéfandouli saifeddinePas encore d'évaluation
- Permis Machine Synthese Session 2020Document12 pagesPermis Machine Synthese Session 2020api-489017636Pas encore d'évaluation
- Climatiseur de Laboratoire A660Document7 pagesClimatiseur de Laboratoire A660Hatem Boukhili100% (1)
- Norme Boulonnerie Construction Infra Ldoc3Document7 pagesNorme Boulonnerie Construction Infra Ldoc3bastophePas encore d'évaluation
- MOCN Et Programmation Cours 14-01-10Document30 pagesMOCN Et Programmation Cours 14-01-10SALAH HamziPas encore d'évaluation
- Td02 Bande RouleuseDocument7 pagesTd02 Bande RouleuseWalae EloiriachiPas encore d'évaluation
- 24 Exo Maison Selectivite DisjoncteurDocument2 pages24 Exo Maison Selectivite Disjoncteuramel moussaouiPas encore d'évaluation
- FiletrageDocument3 pagesFiletrageamaniPas encore d'évaluation
- Ghalem+ Lalla - FraisageDocument14 pagesGhalem+ Lalla - Fraisagefaroukhan0909Pas encore d'évaluation
- Relais Temporisés: Gamme CT-EDocument32 pagesRelais Temporisés: Gamme CT-EAbu FayedPas encore d'évaluation
- Dossier Technique AM4-2019Document2 pagesDossier Technique AM4-2019Zeina NounPas encore d'évaluation
- Projet Tutoré - Présentation PowerPoint Finale (Récupéré)Document17 pagesProjet Tutoré - Présentation PowerPoint Finale (Récupéré)altti bouayePas encore d'évaluation
- Raccords Et Accessoirs A Mettre en NomenclatureDocument4 pagesRaccords Et Accessoirs A Mettre en NomenclaturecheikhfurtifPas encore d'évaluation
- Pont Arrière: CaractéristiquesDocument2 pagesPont Arrière: Caractéristiquesapi-3765963Pas encore d'évaluation
- Programmation Theorique PDFDocument12 pagesProgrammation Theorique PDFالمركز الخاص بالتكوين المهنيPas encore d'évaluation
- VérinDocument114 pagesVérinmenahadilPas encore d'évaluation
- Exercice Verin HydrauliqueDocument3 pagesExercice Verin Hydrauliquemerhawi memePas encore d'évaluation
- Fiche GlockDocument3 pagesFiche Glockhasan bishPas encore d'évaluation
- Grue Mobile Sany STC 500Document6 pagesGrue Mobile Sany STC 500ناصرقوجيلPas encore d'évaluation
- LECON Outillage de Base Du Monteur Dépanneur FrigoristeDocument8 pagesLECON Outillage de Base Du Monteur Dépanneur FrigoristeAIFRAPas encore d'évaluation
- Montage Meissa3 Complet 0222Document26 pagesMontage Meissa3 Complet 0222GustavoGuevaraPas encore d'évaluation
- Conjugación Del Verbo Avoir (Francés) : Cahier Cuaderno Livres Libros Crayons Lápiz Stylo LapiceroDocument2 pagesConjugación Del Verbo Avoir (Francés) : Cahier Cuaderno Livres Libros Crayons Lápiz Stylo LapiceroPatricia Daniela De Felix QuispePas encore d'évaluation
- Rapport FiniDocument20 pagesRapport FiniWannes AhmedPas encore d'évaluation
- F121 Representation Org FiletesDocument2 pagesF121 Representation Org FiletesbousmailPas encore d'évaluation