Vous aimerez peut-être aussi
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)Document0 pageDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)saded05Pas encore d'évaluation
- Devoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedDocument10 pagesDevoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedKhalil BkekriPas encore d'évaluation
- Série Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahDocument6 pagesSérie Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi Abdallahnajlae alfathiPas encore d'évaluation
- Devoir Syn FullDocument10 pagesDevoir Syn FullMouad Memni0% (1)
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 3ème Technique (2010-2011) MR Abdallah RaouafiOthman TmarPas encore d'évaluation
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinPas encore d'évaluation
- DevoirDocument2 pagesDevoirsoufiane8fkaPas encore d'évaluation
- Commandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnDocument7 pagesCommandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnYoussef YouriPas encore d'évaluation
- Devoir de Synthèse N°1 2014 2015 (Lotfi)Document12 pagesDevoir de Synthèse N°1 2014 2015 (Lotfi)AnouarPas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Dhahri Salah)Document6 pagesDevoir de Synthèse N°1 2012 2013 (Dhahri Salah)Youssef CherniPas encore d'évaluation
- DS2.3 ST - DTDocument6 pagesDS2.3 ST - DTBouabdellaoui saif ennasrPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhAmira JebaliPas encore d'évaluation
- N'est Autorisé Année MR:: Mise MarcheDocument5 pagesN'est Autorisé Année MR:: Mise MarchebejaouiPas encore d'évaluation
- Machine de Debitage de CeinturesDocument14 pagesMachine de Debitage de CeinturesGuiliass100% (1)
- Partie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STDocument4 pagesPartie Genie Electrique: Nom: ... Prénom: . . N°: . . 4STHakim SaidiPas encore d'évaluation
- DS2 3ScT 2019-2020Document9 pagesDS2 3ScT 2019-2020Ridha ManaaPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- DT 2Document5 pagesDT 2Rami AliPas encore d'évaluation
- Ds 2 Trim 3 Techmars 2012Document7 pagesDs 2 Trim 3 Techmars 2012Nidhal AbidiPas encore d'évaluation
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- DeoirDocument6 pagesDeoirbasmaPas encore d'évaluation
- TP 1: Logique Combinatoire: Epreuves PratiquesDocument2 pagesTP 1: Logique Combinatoire: Epreuves PratiquesOussema ElloumiPas encore d'évaluation
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- S A D T D C: Ysteme Utomatique E RI E AissesDocument6 pagesS A D T D C: Ysteme Utomatique E RI E Aisseslou louPas encore d'évaluation
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaPas encore d'évaluation
- Devoir À RendreDocument2 pagesDevoir À RendreElias AzoumPas encore d'évaluation
- Devoir de Controle N°2: Systemede DecoupageDocument3 pagesDevoir de Controle N°2: Systemede DecoupageElafif HamdiPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFMayouMohAmed100% (1)
- Devoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiDocument8 pagesDevoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiFethi BenmassoudePas encore d'évaluation
- REPUBLIQUE TUNISIENNE MINISTERE DE L'EDUCATION. 4 Ème SCIENCES TECHNIQUES SECTION - LYCEE HANNIBAL DE L'ARIANA. DUREE - 4 Heures TECHNIQUE PDFDocument12 pagesREPUBLIQUE TUNISIENNE MINISTERE DE L'EDUCATION. 4 Ème SCIENCES TECHNIQUES SECTION - LYCEE HANNIBAL DE L'ARIANA. DUREE - 4 Heures TECHNIQUE PDFRaja Tě JazziriPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Application 3 Moto Compresseur D Air A Piston PDFDocument10 pagesApplication 3 Moto Compresseur D Air A Piston PDFHajar NhailaPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiFethi BenmassoudePas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 pagesDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresPas encore d'évaluation
- Devoir de Synthese #02: Bouabidi Y. Ben Othman MDocument6 pagesDevoir de Synthese #02: Bouabidi Y. Ben Othman MBouabdellaoui saif ennasrPas encore d'évaluation
- 5grafcet Exercice 04Document1 page5grafcet Exercice 04KingSqueed 888Pas encore d'évaluation
- Unité de Fabrication de Fûts - DPMDocument4 pagesUnité de Fabrication de Fûts - DPMramziPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFTitan CR YZPas encore d'évaluation
- Zaghouan Systeme de Traitement Thermique: Devoir de Synthese N°3Document3 pagesZaghouan Systeme de Traitement Thermique: Devoir de Synthese N°3Quincaillerie Ben MansourPas encore d'évaluation
- DC14ST2008 Enonce Corrige PDFDocument8 pagesDC14ST2008 Enonce Corrige PDFnermin brahmiPas encore d'évaluation
- Chap. III: Automate Programmable Industriel (API) : AutomatismeDocument27 pagesChap. III: Automate Programmable Industriel (API) : Automatismeimane elmamoune100% (1)
- DP Elec 13 - 14Document4 pagesDP Elec 13 - 14Elafif HamdiPas encore d'évaluation
- TP3-6a PerageDocument1 pageTP3-6a PeragebaskourPas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- 1-Circuit Intégré: 74XX83:: Document Constructeur Des Circuits Intégrés Utilisés Dans Carte de CommandeDocument3 pages1-Circuit Intégré: 74XX83:: Document Constructeur Des Circuits Intégrés Utilisés Dans Carte de CommandeHakim SaidiPas encore d'évaluation
- DCN°3 3ScT 16-17 DTDocument3 pagesDCN°3 3ScT 16-17 DTBouabdellaoui saif ennasr100% (1)
- DT DS1 3STDocument2 pagesDT DS1 3STKadri MongiPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Électrique - Bac TechniqueDocument7 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac TechniqueAlaeddine Ben HassenPas encore d'évaluation
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
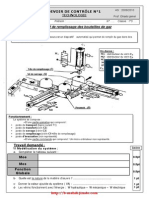
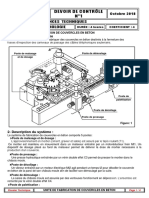
- S U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en CartonDocument7 pagesS U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en Cartonbejaoui100% (1)
- 3-Devoir de Controle N1-2AS-2021Document5 pages3-Devoir de Controle N1-2AS-2021Rasmi BaananouPas encore d'évaluation
- Examen AutomatismeDocument5 pagesExamen AutomatismeKadjePas encore d'évaluation
- Td1 API Grafcet Geet19Document7 pagesTd1 API Grafcet Geet19dansokomahaPas encore d'évaluation
- Commande de MachinesDocument3 pagesCommande de MachinesJean Claude Agnomo100% (2)
- DS-2Ing-AutInd 2016Document3 pagesDS-2Ing-AutInd 2016Nouha MnassriPas encore d'évaluation
- Serie A.L.IDocument12 pagesSerie A.L.IArfaoui AymenPas encore d'évaluation
- Eclaircisserments Concernant Les Compteurs SynchronesDocument2 pagesEclaircisserments Concernant Les Compteurs SynchronesArfaoui AymenPas encore d'évaluation
- Série2 - PICDocument8 pagesSérie2 - PICArfaoui AymenPas encore d'évaluation
- 01 Prototypage Circuit Elec DDocument16 pages01 Prototypage Circuit Elec DArfaoui AymenPas encore d'évaluation
- Correction D.Rep GE DS3 MAI2022Document4 pagesCorrection D.Rep GE DS3 MAI2022Arfaoui Aymen100% (1)
- DPS3 ElectrLYCEE TABARKADocument3 pagesDPS3 ElectrLYCEE TABARKAArfaoui AymenPas encore d'évaluation
- TP XX Realisation D Un Circuit Imprime - SolutionsDocument6 pagesTP XX Realisation D Un Circuit Imprime - SolutionsArfaoui AymenPas encore d'évaluation
- Exercice MLI+LCDDocument5 pagesExercice MLI+LCDArfaoui AymenPas encore d'évaluation
- B3-Moteur Asynchrone Triphasé-2020-ÉlèveDocument12 pagesB3-Moteur Asynchrone Triphasé-2020-ÉlèveArfaoui AymenPas encore d'évaluation
- 5 L ApiDocument10 pages5 L ApiArfaoui AymenPas encore d'évaluation
- A.L.I BacDocument7 pagesA.L.I BacArfaoui AymenPas encore d'évaluation
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 pagesCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- Dev Cont N - 1 4tecDocument6 pagesDev Cont N - 1 4tecArfaoui AymenPas encore d'évaluation
- B3-Moteur Asynchrone Triphasé-2020-ÉlèveDocument12 pagesB3-Moteur Asynchrone Triphasé-2020-ÉlèveArfaoui AymenPas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- Devoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi NasrDocument7 pagesDevoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi Nasrmatmatijamel100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFArfaoui Aymen100% (2)
- Dev Cont N - 1 4tecDocument6 pagesDev Cont N - 1 4tecArfaoui AymenPas encore d'évaluation
- Cours DiapoDocument34 pagesCours DiapoluciePas encore d'évaluation
- Club Sportif AmateurDocument9 pagesClub Sportif AmateurMam OunPas encore d'évaluation
- Devenez Mentaliste Bastien BricoutDocument30 pagesDevenez Mentaliste Bastien BricoutKantik33% (3)
- Emoto Masaru - Fliege Jurgen - Le Pouvoir Guerisseur de L EauDocument108 pagesEmoto Masaru - Fliege Jurgen - Le Pouvoir Guerisseur de L EauHOUETONIAL100% (6)
- Préparer Un Entretien D'embaucheDocument4 pagesPréparer Un Entretien D'embaucheAbril DíazPas encore d'évaluation
- Sols Gonflants PDFDocument97 pagesSols Gonflants PDFAT NMPas encore d'évaluation
- Chapitre 4-La Gestion Des ConflitsDocument28 pagesChapitre 4-La Gestion Des ConflitsMaroPas encore d'évaluation
- Gestion D'un Feu TricoloreDocument9 pagesGestion D'un Feu TricolorelfadliPas encore d'évaluation
- La PonctuationDocument10 pagesLa PonctuationVanya SimeonovaPas encore d'évaluation
- Différence Entre Une Société Et Une EntrepriseDocument6 pagesDifférence Entre Une Société Et Une EntrepriseKaramPas encore d'évaluation
- Tests Psy Syllogisme @FTDocument5 pagesTests Psy Syllogisme @FTfatou tinePas encore d'évaluation
- M1 TP1 VHDLDocument21 pagesM1 TP1 VHDLboulainine houriaPas encore d'évaluation
- Algebre 2022 CoursintegralDocument74 pagesAlgebre 2022 CoursintegralBoulitoPas encore d'évaluation
- guide d - أ©purationDocument44 pagesguide d - أ©purationnassima100% (1)
- These LoussakoumounouDocument529 pagesThese LoussakoumounouYannick Demeo Goli100% (1)
- L'inconscientDocument5 pagesL'inconscientVieilleChamelle100% (1)
- Feuille TageDocument1 pageFeuille TageAissa Aimene100% (1)
- Comment Configurer SARDocument5 pagesComment Configurer SARaurorion_adminPas encore d'évaluation
- Psychologie Et AlchimieDocument20 pagesPsychologie Et Alchimiezordzema100% (2)
- Aslugen N Tira N Tmazight PDFDocument292 pagesAslugen N Tira N Tmazight PDFMuhaduRemdan100% (3)
- Plan D' Affaire - Le Saule EnergetiqueDocument33 pagesPlan D' Affaire - Le Saule EnergetiqueLorena GoguPas encore d'évaluation
- 1958 Les Musulmans en Amérique D'avant Christophe ColombDocument8 pages1958 Les Musulmans en Amérique D'avant Christophe ColombneferisaPas encore d'évaluation
- Histoire de La Communication Communication Ch2 Les Differents MediaDocument29 pagesHistoire de La Communication Communication Ch2 Les Differents MediaFanny GaboryPas encore d'évaluation
- 14-Puits D'infiltration (Nonc)Document2 pages14-Puits D'infiltration (Nonc)Anass NfifakhPas encore d'évaluation
- Technique de Communication 2Document8 pagesTechnique de Communication 2SamyChemala100% (1)
- Sujet: Dans Quelle Mesure Le SEO Est-Il Un Facteur D'accompagnement À La Transformation Digitale de Nestlé ? Le Cas deDocument93 pagesSujet: Dans Quelle Mesure Le SEO Est-Il Un Facteur D'accompagnement À La Transformation Digitale de Nestlé ? Le Cas debapstPas encore d'évaluation
- Objets Et Classes C++Document60 pagesObjets Et Classes C++Anas Yassine100% (1)
- 6 Conseils Pour Devenir Un Pro Du TradingDocument76 pages6 Conseils Pour Devenir Un Pro Du TradingSaad Tate100% (3)
- Rapport de Jury CGL Histoire 2022Document3 pagesRapport de Jury CGL Histoire 2022Croco BochuPas encore d'évaluation
- EssaiDocument422 pagesEssaiPhilippe BeugniezPas encore d'évaluation