Vous aimerez peut-être aussi
- Proba Chapitre4-MkiDocument7 pagesProba Chapitre4-MkisdfdgdPas encore d'évaluation
- Variables Aléatoires Et Lois de ProbabilitéDocument8 pagesVariables Aléatoires Et Lois de Probabilitésjaubert100% (3)
- Ch3 ProbaDocument30 pagesCh3 ProbaAchraf FadelPas encore d'évaluation
- Chap4 Variable Aléatoire Continue-1Document8 pagesChap4 Variable Aléatoire Continue-1NajlaealalawiPas encore d'évaluation
- Chapitre3 PROBA1-2022 2023Document11 pagesChapitre3 PROBA1-2022 2023hibaPas encore d'évaluation
- Chap17-Exercices Analyse AsymptotiquesDocument2 pagesChap17-Exercices Analyse AsymptotiquesAnowar SaleinePas encore d'évaluation
- Probabilités TD3Document2 pagesProbabilités TD3abidm2645Pas encore d'évaluation
- Cours Variables Aleatoires ContinuesDocument10 pagesCours Variables Aleatoires ContinuesPablo EscobarPas encore d'évaluation
- Mines 2016 Integrales A ParamtersDocument3 pagesMines 2016 Integrales A ParamtersAmine ZitounPas encore d'évaluation
- I w ∈ Ω/ X w: Chapitre 2: Lois De Probabilite DiscretesDocument7 pagesI w ∈ Ω/ X w: Chapitre 2: Lois De Probabilite DiscretesZ CoulPas encore d'évaluation
- Exos Variables A DensiteDocument10 pagesExos Variables A DensiteAndronet TechniquePas encore d'évaluation
- ITI3 - RAN - Probas - 3 (1) Cours ZwiiinDocument4 pagesITI3 - RAN - Probas - 3 (1) Cours Zwiiinsalma abaraghiPas encore d'évaluation
- Chapitre 3Document15 pagesChapitre 3Döūãe OđPas encore d'évaluation
- TD Proba CorrectionDocument44 pagesTD Proba CorrectionLerrys Obiang100% (1)
- 821 Exos 25 VARDensiteDocument2 pages821 Exos 25 VARDensiteYousra AlaouiPas encore d'évaluation
- Chapitre 3Document23 pagesChapitre 3OusswaPas encore d'évaluation
- Conducteur 1Document20 pagesConducteur 1RisalaPas encore d'évaluation
- Chap3 ProbaDocument10 pagesChap3 ProbaOumaima FakhrPas encore d'évaluation
- Cha 2Document11 pagesCha 2Blh OussamaPas encore d'évaluation
- Variables AléatoiresDocument17 pagesVariables Aléatoireslili edouardPas encore d'évaluation
- A 2016 - MATH. II MP.: Les Candidats Sont Priés de Mentionner de Façon Apparente Sur La Première Page de La CopieDocument5 pagesA 2016 - MATH. II MP.: Les Candidats Sont Priés de Mentionner de Façon Apparente Sur La Première Page de La CopieAnne GerardPas encore d'évaluation
- TD2Document2 pagesTD2abdelhakim assln100% (1)
- Cour 3Document8 pagesCour 3NininePas encore d'évaluation
- TD Lim-Cont-Dé ri-DL PCSM 2022-2023Document2 pagesTD Lim-Cont-Dé ri-DL PCSM 2022-2023diaoousmane1Pas encore d'évaluation
- TD4 Variable Aleatoire ContinuesDocument3 pagesTD4 Variable Aleatoire Continuesxtnm5ftzffPas encore d'évaluation
- DS02EtudedeFonctionFonctionsusuellesIntegrales PDFDocument6 pagesDS02EtudedeFonctionFonctionsusuellesIntegrales PDFmednourPas encore d'évaluation
- OPTIMISATIONDocument26 pagesOPTIMISATIONdjossinkou cabrelPas encore d'évaluation
- L2TD4Document3 pagesL2TD4Hassen TalebPas encore d'évaluation
- Fonctions UsuellesDocument14 pagesFonctions UsuellesAbdjalil AchehabPas encore d'évaluation
- Limites Et Continuité (Exercices Supplémentaires)Document82 pagesLimites Et Continuité (Exercices Supplémentaires)ArthurLeleu100% (1)
- 1r5TrBHcF2Ly-FMaw7O1ijBrRyx7lI ARDocument9 pages1r5TrBHcF2Ly-FMaw7O1ijBrRyx7lI ARali.belhajletaifPas encore d'évaluation
- Devoir SDocument7 pagesDevoir SALI MESSAOUD HanaPas encore d'évaluation
- CCP 08Document5 pagesCCP 08Salma SoulaymaniPas encore d'évaluation
- Chap 1 MF 1 2020 2021Document8 pagesChap 1 MF 1 2020 2021Black StarPas encore d'évaluation
- Exercices D - AnalyseDocument5 pagesExercices D - AnalyseAnas TahharPas encore d'évaluation
- Maths4 TD 2 Support PDFDocument5 pagesMaths4 TD 2 Support PDFNicolas DebrennePas encore d'évaluation
- VARAD Enonces PDFDocument9 pagesVARAD Enonces PDFcieloPas encore d'évaluation
- FE16-Intégration Et Dérivation - v2Document3 pagesFE16-Intégration Et Dérivation - v2Marc TentiPas encore d'évaluation
- Série D'exercices N°1 - Math - Limite Et Continuités - Bac Technique (2016-2017) MR Dhaouadi AmeurDocument2 pagesSérie D'exercices N°1 - Math - Limite Et Continuités - Bac Technique (2016-2017) MR Dhaouadi Ameurسفيان البجاويPas encore d'évaluation
- S5 MPI AnalyseFourier!2014!Examen1Correction!20140110145452 PDFDocument3 pagesS5 MPI AnalyseFourier!2014!Examen1Correction!20140110145452 PDFLoraine TounaPas encore d'évaluation
- Cours Probabilites Lois ContinuesDocument12 pagesCours Probabilites Lois ContinuesJEAN JOSUE RAKOTOARIMANANAPas encore d'évaluation
- Fic 00102Document6 pagesFic 00102Tahiri MehdiPas encore d'évaluation
- Examen AnalyseDocument2 pagesExamen AnalyseskipperPas encore d'évaluation
- Etude D - Une Série de Fonction 2Document5 pagesEtude D - Une Série de Fonction 2Ręnaūd NgùemaPas encore d'évaluation
- Banque CCP Sup AnalyseDocument3 pagesBanque CCP Sup AnalyseSouleymane KarimPas encore d'évaluation
- CH5 Vac Et Loi PresDocument30 pagesCH5 Vac Et Loi Preschaimaeelhmami20Pas encore d'évaluation
- Série 2 Analyse 2Document8 pagesSérie 2 Analyse 2bouzidi hamzaPas encore d'évaluation
- CC1 - Math 4 - 2022 - 23 - Sequence - 1Document2 pagesCC1 - Math 4 - 2022 - 23 - Sequence - 1dougafatouma9Pas encore d'évaluation
- TD2 - 2016Document2 pagesTD2 - 2016Amine AzaoumPas encore d'évaluation
- Agreg TD EsperanceDocument4 pagesAgreg TD Esperancechristbest682Pas encore d'évaluation
- TD1. E.E. CorrigéDocument5 pagesTD1. E.E. Corrigéouidir8888Pas encore d'évaluation
- TD4 Var À DensitéDocument2 pagesTD4 Var À DensitéChrif NadorPas encore d'évaluation
- Les Lois ProbabilitéDocument27 pagesLes Lois Probabilitéhananaharchi19Pas encore d'évaluation
- TD 3Document3 pagesTD 3Elfried TchawouPas encore d'évaluation
- 3 Variables Aléatoires Continues Et Lois de ProbabilitésDocument10 pages3 Variables Aléatoires Continues Et Lois de Probabilitéserrab2012Pas encore d'évaluation
- Etude Locale Des FonctionsDocument1 pageEtude Locale Des FonctionsDavy NzaouPas encore d'évaluation
- Devoir2 Analyse4 2023 2024Document3 pagesDevoir2 Analyse4 2023 2024Taffohouo Nwaffeu Yves ValdezPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Avant-Projet de These NED - 03 - 2019Document5 pagesAvant-Projet de These NED - 03 - 2019Z CoulPas encore d'évaluation
- 2110 ANTENNA Agroecologie-Cours WEB-2Document76 pages2110 ANTENNA Agroecologie-Cours WEB-2Z CoulPas encore d'évaluation
- Annonce - Appel À Petits Projets 2023 - FRDocument9 pagesAnnonce - Appel À Petits Projets 2023 - FRZ CoulPas encore d'évaluation
- Equal Opportunities Form FrenchDocument2 pagesEqual Opportunities Form FrenchHaïdaraPas encore d'évaluation
- UntitledDocument10 pagesUntitledZ CoulPas encore d'évaluation
- 2022 Recrutementcmsafdi Cotonou VFDocument2 pages2022 Recrutementcmsafdi Cotonou VFZ CoulPas encore d'évaluation
- Décret Normes de Rejet03Document1 pageDécret Normes de Rejet03Z CoulPas encore d'évaluation
- Avant-Projet de These NED - 02 - 2019Document4 pagesAvant-Projet de These NED - 02 - 2019Z CoulPas encore d'évaluation
- Avant-Projet de These NED - 05 - 2019Document4 pagesAvant-Projet de These NED - 05 - 2019Z CoulPas encore d'évaluation
- Exemple de Plan Assurance Qualité Avec Procédures D'exécutionDocument60 pagesExemple de Plan Assurance Qualité Avec Procédures D'exécutionWassim Mansour100% (4)
- Avant-Projet de These NED - 01 - 2019Document4 pagesAvant-Projet de These NED - 01 - 2019Z CoulPas encore d'évaluation
- Quotidien n-2920-CDocument40 pagesQuotidien n-2920-CZ CoulPas encore d'évaluation
- Avant-Projet de These NED - 04 - 2019Document3 pagesAvant-Projet de These NED - 04 - 2019Z CoulPas encore d'évaluation
- Projet-dAAP 8 FONRID 2021 VFDocument9 pagesProjet-dAAP 8 FONRID 2021 VFZ CoulPas encore d'évaluation
- Décret Normes de Rejet04Document1 pageDécret Normes de Rejet04Z CoulPas encore d'évaluation
- Décret Normes de Rejet01Document1 pageDécret Normes de Rejet01Z CoulPas encore d'évaluation
- Décret Normes de Rejet02Document1 pageDécret Normes de Rejet02Z CoulPas encore d'évaluation
- Décret Normes de Rejet05Document1 pageDécret Normes de Rejet05Z CoulPas encore d'évaluation
- Décret Normes de Rejet07Document1 pageDécret Normes de Rejet07Z CoulPas encore d'évaluation
- Décret Normes de Rejet08Document1 pageDécret Normes de Rejet08Z CoulPas encore d'évaluation
- Quotidien N°2877Document24 pagesQuotidien N°2877Z CoulPas encore d'évaluation
- CMP 2009 Code Des Marches Publics 2009Document120 pagesCMP 2009 Code Des Marches Publics 2009lebogsoPas encore d'évaluation
- Décret Normes de Rejet06Document1 pageDécret Normes de Rejet06Z CoulPas encore d'évaluation
- Décret Normes de Rejet09Document1 pageDécret Normes de Rejet09Z CoulPas encore d'évaluation
- Quotidien n-2905-cDocument44 pagesQuotidien n-2905-cZ CoulPas encore d'évaluation
- Quotidien n-2912-cDocument36 pagesQuotidien n-2912-cZ CoulPas encore d'évaluation
- Quotidien n-2907-cDocument32 pagesQuotidien n-2907-cZ CoulPas encore d'évaluation
- Quotidien n-2903-cDocument44 pagesQuotidien n-2903-cZ CoulPas encore d'évaluation
- Quotidien n-2908-c PDFDocument44 pagesQuotidien n-2908-c PDFZ CoulPas encore d'évaluation
- Tube VentouriDocument10 pagesTube VentouriMohammed BoulbairPas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Mesure de Compression Moteur Vers FinaleDocument46 pagesMesure de Compression Moteur Vers FinaleRaouf HarzallahPas encore d'évaluation
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- Memoire Inj Messaoud BENZOUAIDocument168 pagesMemoire Inj Messaoud BENZOUAIManong ShegueyPas encore d'évaluation
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- Prise en Main de Microsoft Office Excel 2016Document713 pagesPrise en Main de Microsoft Office Excel 2016max80% (5)
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 pagesPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimPas encore d'évaluation
- ALIZE LCPC MU v1.5 FR PDFDocument116 pagesALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
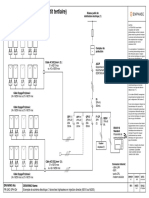
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 pagesTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 page2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Pas encore d'évaluation
- The Cuban Missile CrisisDocument8 pagesThe Cuban Missile Crisismilan.bodis523Pas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- TP2Document4 pagesTP2Youssef Don RajawiPas encore d'évaluation
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002Pas encore d'évaluation
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 pagesCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Jadwal Genap 2223-2Document2 pagesJadwal Genap 2223-2nowo benyPas encore d'évaluation
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 pagesChapitre 1 LES OUTILS MATHEMATIQUESa.ddPas encore d'évaluation
- Analyse D'une Situation de Communication en TaDocument2 pagesAnalyse D'une Situation de Communication en Taroger martin bassong batiigPas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Process AciérieDocument6 pagesProcess Aciériesanae jaouiPas encore d'évaluation