Vous aimerez peut-être aussi
- Démarrage Des Moteurs AsynchronesDocument91 pagesDémarrage Des Moteurs Asynchronesyassin akkninnPas encore d'évaluation
- Travail D'équipe - CopieDocument17 pagesTravail D'équipe - CopieErnest BakoutaPas encore d'évaluation
- Chapitre 5 ASSOCIATION DES COMPOSANTS PASSIFDocument17 pagesChapitre 5 ASSOCIATION DES COMPOSANTS PASSIFTorchaniPas encore d'évaluation
- TD 1 2geDocument4 pagesTD 1 2geAbdelhadi AZPas encore d'évaluation
- SNTF-Locomotive 6FE - Généralités (1) 2Document10 pagesSNTF-Locomotive 6FE - Généralités (1) 2Sihem MérPas encore d'évaluation
- TP2 ElpDocument2 pagesTP2 ElpIshak BoukhPas encore d'évaluation
- Physique Appli 1993Document8 pagesPhysique Appli 1993Super arabienPas encore d'évaluation
- Moteur SynchroneDocument11 pagesMoteur SynchroneAhmed MidoPas encore d'évaluation
- Corrige Sujet ET2006Document37 pagesCorrige Sujet ET2006maher alouiPas encore d'évaluation
- Sujet DS3 1TSI1 30 - 01 - 2020Document2 pagesSujet DS3 1TSI1 30 - 01 - 2020Achraf AlaouiPas encore d'évaluation
- Msyn PDFDocument34 pagesMsyn PDFbensumbbPas encore d'évaluation
- Hacheur Réversible Avec Asservissement en Courant Montage DidactiqueDocument11 pagesHacheur Réversible Avec Asservissement en Courant Montage DidactiqueIslam MęĐjPas encore d'évaluation
- IntroductionDocument10 pagesIntroductionbennoui houssem100% (1)
- Hacheur de CourantDocument26 pagesHacheur de CourantAbdelkarim D. AdelPas encore d'évaluation
- SNTF-Locomotive 6FE - Généralités (1) 2Document16 pagesSNTF-Locomotive 6FE - Généralités (1) 2Sihem MérPas encore d'évaluation
- BTSETK95Document6 pagesBTSETK95Sofiane OuadiPas encore d'évaluation
- TD CH03Document5 pagesTD CH03Doha BensPas encore d'évaluation
- Electronique Pratique 051 1982-07-08Document73 pagesElectronique Pratique 051 1982-07-08Jorge AgariePas encore d'évaluation
- Résumé Electricite-ElectroniqueDocument7 pagesRésumé Electricite-ElectroniqueOumarou HamissouPas encore d'évaluation
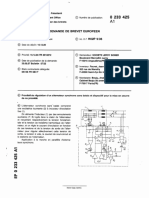
- EP0233425A1Document7 pagesEP0233425A1ilyes belhajPas encore d'évaluation
- Chapitre 4Document8 pagesChapitre 4ali hadjiPas encore d'évaluation
- TP - Électronique de Puissance PDFDocument23 pagesTP - Électronique de Puissance PDFabdelrhafour dhaimPas encore d'évaluation
- Cours AlternateurDocument10 pagesCours Alternateurjeremy54000100% (2)
- Electronique Pratique 081 1985-04Document61 pagesElectronique Pratique 081 1985-04Jorge AgariePas encore d'évaluation
- Variation de Vitesse MCCDocument12 pagesVariation de Vitesse MCCKaziiLaggoun0% (1)
- 3 Transfo Triphasé (TT)Document8 pages3 Transfo Triphasé (TT)Akouete BenissanPas encore d'évaluation
- Chapitre 02Document14 pagesChapitre 02Anisse HimeurPas encore d'évaluation
- ALTERNATEUR Explications Et DiagnosticDocument4 pagesALTERNATEUR Explications Et DiagnosticPaulo RochaPas encore d'évaluation
- TD E4 2e-OrdreDocument11 pagesTD E4 2e-Ordrelbog.trashPas encore d'évaluation
- TP 6 Accrochage Alternateur Triphase ReseauDocument7 pagesTP 6 Accrochage Alternateur Triphase ReseauAmiir AmirPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- MACHINES Chap 2 M.AsynchroneDocument15 pagesMACHINES Chap 2 M.AsynchroneAmiiRaPas encore d'évaluation
- MUF113132Document4 pagesMUF113132Bationo Antoine De padouePas encore d'évaluation
- C 642 Alternate Urs 2Document60 pagesC 642 Alternate Urs 2Julia Batista MéndezPas encore d'évaluation
- TP 3 Etude Machine Courant ContinuDocument6 pagesTP 3 Etude Machine Courant ContinuOnsPas encore d'évaluation
- Chap 5 PDFDocument14 pagesChap 5 PDFMohamed AmineeoxPas encore d'évaluation
- r731 Control Board ModuleDocument6 pagesr731 Control Board ModuleSidarta TrovãoPas encore d'évaluation
- Electronique de Puissance09 PDFDocument60 pagesElectronique de Puissance09 PDFbsamatrbsPas encore d'évaluation
- Electric Manitiu MRT 2150Document34 pagesElectric Manitiu MRT 2150brasg100% (3)
- RedresseursDocument21 pagesRedresseursNADERRR0% (1)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Cours: Machine Asynchrone: I-Généralités 1 - DéfinitionDocument10 pagesCours: Machine Asynchrone: I-Généralités 1 - DéfinitionFatiPas encore d'évaluation
- Cours Mec Fluides SMP 17 18Document43 pagesCours Mec Fluides SMP 17 18FatiPas encore d'évaluation
- Eolienne Dossier ThematiqueDocument20 pagesEolienne Dossier ThematiqueFatiPas encore d'évaluation
- CalculDocument9 pagesCalculFatiPas encore d'évaluation
- Efficacité Énergétique-1Document36 pagesEfficacité Énergétique-1Fati50% (2)
- Iut MC Et2 4 ForwardDocument5 pagesIut MC Et2 4 ForwardFatiPas encore d'évaluation
- Convertisseur DC DCDocument3 pagesConvertisseur DC DCFatiPas encore d'évaluation
- Rencontre Des Deux Infinis-2016 Xavier DoligezDocument63 pagesRencontre Des Deux Infinis-2016 Xavier DoligezFatiPas encore d'évaluation
- Organigramme-2Document3 pagesOrganigramme-2Abdel Motaleb AL-SaadyPas encore d'évaluation
- Norman Robert Foster PDFDocument14 pagesNorman Robert Foster PDFEya MethlouthiPas encore d'évaluation
- موضوع اختبار الفصل الثالث -اللغة الفرنسية -الأولى ثانوي آداب وفلسفة-2Document2 pagesموضوع اختبار الفصل الثالث -اللغة الفرنسية -الأولى ثانوي آداب وفلسفة-2azoug.karim01Pas encore d'évaluation
- Négociation CommercialeDocument7 pagesNégociation Commercialeoussama ouhababPas encore d'évaluation
- 2 Asepsie Et AntisepsieDocument10 pages2 Asepsie Et AntisepsieChristian NgalaPas encore d'évaluation
- Merise 1 Csi Ida1Document65 pagesMerise 1 Csi Ida1maurian seuPas encore d'évaluation
- Tarea 5 de Frances Yoa Intermedio 2Document6 pagesTarea 5 de Frances Yoa Intermedio 2jose limaPas encore d'évaluation
- CV Julia Szanka FRDocument1 pageCV Julia Szanka FRJulija SankaPas encore d'évaluation
- CV Anouari - FluidesDocument2 pagesCV Anouari - FluidesAbdou AbdouuPas encore d'évaluation
- Taxes D'effet Équivalant À Des Droits de Douane 2006Document15 pagesTaxes D'effet Équivalant À Des Droits de Douane 2006berniverPas encore d'évaluation
- Questionnaire D'enqueteDocument2 pagesQuestionnaire D'enqueteCarion Gaïus Mahuto DOSSAPas encore d'évaluation
- DS TW 11mai CorDocument6 pagesDS TW 11mai CorDescartes VergezPas encore d'évaluation
- Le Livre Du Salut GoétiqueDocument61 pagesLe Livre Du Salut Goétiquemonczka patrick100% (1)
- CV HoudaDocument1 pageCV HoudamessaoudiPas encore d'évaluation
- CV Sahbani Taher FraDocument3 pagesCV Sahbani Taher FrataherPas encore d'évaluation
- Comment Suivre Un Nouveau ConvertiDocument15 pagesComment Suivre Un Nouveau Convertiben tshikendaPas encore d'évaluation
- Autovision Rue Satoris - Recherche GoogleDocument1 pageAutovision Rue Satoris - Recherche GoogleLaurent BerishajPas encore d'évaluation
- Etat Des Unités IndustriellesDocument7 pagesEtat Des Unités Industrielleshama abdoulaye diallo aboubacar100% (2)
- NF EN 450-1 - Octobre 2005 PDFDocument33 pagesNF EN 450-1 - Octobre 2005 PDFKevin CodjoviPas encore d'évaluation
- EFM Maintenance D'un Réseau - Variante 1 - CorrectionDocument3 pagesEFM Maintenance D'un Réseau - Variante 1 - CorrectionbaybaysalahPas encore d'évaluation
- Lanista RPGDocument32 pagesLanista RPGWanda Von DunajevvPas encore d'évaluation
- Catalogue Picasso CafeDocument26 pagesCatalogue Picasso CafeAbderrahmane EssaouriPas encore d'évaluation
- Montres À QuartzDocument60 pagesMontres À QuartzMikeNovember100% (1)
- Cahier de Charge AEPDocument60 pagesCahier de Charge AEPRKAM MellecemPas encore d'évaluation
- Lettre de MotivationDocument2 pagesLettre de MotivationGabriel ValtchevPas encore d'évaluation
- Catalogue ChaussuresDocument62 pagesCatalogue ChaussuresSERATPas encore d'évaluation
- ds1 CinDocument3 pagesds1 Cinmohamed laghribPas encore d'évaluation
- Droit Des Sociétés 1Document152 pagesDroit Des Sociétés 1David GNAGOPas encore d'évaluation
- 20220212000935Document255 pages20220212000935Said BabaciPas encore d'évaluation
- Wittfogel Le Despotisme OrientalDocument712 pagesWittfogel Le Despotisme Orientalzaadig100% (1)