Vous aimerez peut-être aussi
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Série N°15 Energie Cinétique 2012 2013 (Ben Amor Jameleddine)Document2 pagesSérie N°15 Energie Cinétique 2012 2013 (Ben Amor Jameleddine)Mewguvelezza AhmedsalekPas encore d'évaluation
- OLYMPIADE TerminaleDocument16 pagesOLYMPIADE TerminalealfredPas encore d'évaluation
- 10 Exercices de Maths Fonctions Avec Correction s1 PDFDocument12 pages10 Exercices de Maths Fonctions Avec Correction s1 PDFMouhibPas encore d'évaluation
- 01-LYTOKO - 1ère DDocument32 pages01-LYTOKO - 1ère DGeremyPas encore d'évaluation
- Sequence n5 - 2nde C - College Les Lilas 2014 2015 PDFDocument2 pagesSequence n5 - 2nde C - College Les Lilas 2014 2015 PDFIgor BAGNIA KETCHEMENPas encore d'évaluation
- Revision T°s PhysiqueDocument6 pagesRevision T°s PhysiquebipPas encore d'évaluation
- CorrigéEx 3 Bac Blanc D122016Document3 pagesCorrigéEx 3 Bac Blanc D122016Bourama DjirePas encore d'évaluation
- Mouvement Dans Un Champ Uniforme - Exercices - Devoirs: Exercice 1Document9 pagesMouvement Dans Un Champ Uniforme - Exercices - Devoirs: Exercice 1Amine AlaoUii Alaoui100% (1)
- TD 2 Mécanique Des FluidesDocument2 pagesTD 2 Mécanique Des FluidesMouäädPas encore d'évaluation
- 1S2 Serie1 LDTHDDocument2 pages1S2 Serie1 LDTHDBousso GueyePas encore d'évaluation
- Devoirs 1ère DC Extrait Du ''Le Physicien''Document19 pagesDevoirs 1ère DC Extrait Du ''Le Physicien''ruffinh223Pas encore d'évaluation
- OLYMPIADE - Niveau PremièreDocument14 pagesOLYMPIADE - Niveau PremièrealfredPas encore d'évaluation
- Exotrigo 1Document4 pagesExotrigo 1Diougal NangoPas encore d'évaluation
- Exercices Suites Numeriques Terminale S MathsDocument8 pagesExercices Suites Numeriques Terminale S MathsAIFRA100% (1)
- CO1 TS2 2016 LSLL WahabdiopDocument4 pagesCO1 TS2 2016 LSLL WahabdiopMed BriniPas encore d'évaluation
- c2 1bac Biof - Les Grandeurs Liées À La Quantité de Matière Prof - Sbiro (WWW - Pc1.ma) PDFDocument2 pagesc2 1bac Biof - Les Grandeurs Liées À La Quantité de Matière Prof - Sbiro (WWW - Pc1.ma) PDFHAMADA1972100% (2)
- Corrigé Bac D 1996Document3 pagesCorrigé Bac D 1996AMADOU TYOUPas encore d'évaluation
- Dev1s2a 1 CVMDocument1 pageDev1s2a 1 CVMAida MbodjiPas encore d'évaluation
- 1 2 Barycentre CoursDocument7 pages1 2 Barycentre CoursFlora Rachel100% (1)
- Compo 1er S S2Document2 pagesCompo 1er S S2Ismaïla Diallo0% (1)
- ILEPHYSIQUE - Phys - 1s Methodes Calcul Intensite Force PDFDocument5 pagesILEPHYSIQUE - Phys - 1s Methodes Calcul Intensite Force PDFMoussa BanaPas encore d'évaluation
- Dynmq PT Mat - EXO - Enoncés - FRDocument11 pagesDynmq PT Mat - EXO - Enoncés - FRkaderPas encore d'évaluation
- Extrait de Cours 1ere SVTDocument16 pagesExtrait de Cours 1ere SVTyoy100% (1)
- Serie 1 - La CinematiqueDocument7 pagesSerie 1 - La Cinematiquejofrelougangou23Pas encore d'évaluation
- BijectionDocument4 pagesBijectionkoloubla533856100% (1)
- Cinema TiqueDocument15 pagesCinema TiqueEspoirPas encore d'évaluation
- Composition N°2 1ERE C LYDANODocument3 pagesComposition N°2 1ERE C LYDANONgouen AnouarPas encore d'évaluation
- Togo BAC D 2020 Sciences PhysiquesDocument2 pagesTogo BAC D 2020 Sciences PhysiqueszedicusboonPas encore d'évaluation
- Composition de Mathematiques Du 1 Semestre Niveau: 1S1 Duree: 4 HeuresDocument2 pagesComposition de Mathematiques Du 1 Semestre Niveau: 1S1 Duree: 4 HeuresKANDEPas encore d'évaluation
- TD PHY303 Physique Nucleaire2020 2021Document6 pagesTD PHY303 Physique Nucleaire2020 2021Amer Constat blaugrana100% (1)
- Ch07 Exercices+SolutionsDocument34 pagesCh07 Exercices+SolutionsSerges AbologoPas encore d'évaluation
- Compo 1ère S Sem 2Document3 pagesCompo 1ère S Sem 2Boubacar BaldePas encore d'évaluation
- Auto AdjDocument9 pagesAuto AdjHamza 01Pas encore d'évaluation
- Tchebychev InterpolationDocument6 pagesTchebychev InterpolationazzPas encore d'évaluation
- Auteur: ALLOH Yaovi Robert Professeur de Sciences Physiques Au TOGODocument28 pagesAuteur: ALLOH Yaovi Robert Professeur de Sciences Physiques Au TOGORodrigueWafoPas encore d'évaluation
- Série N° 1 Nombres Réels SMAI 23-24 Avec CorrigéDocument6 pagesSérie N° 1 Nombres Réels SMAI 23-24 Avec CorrigéSamahi Fatima ZahraPas encore d'évaluation
- Fonctions Primitives Serie D Exercices 1 4Document1 pageFonctions Primitives Serie D Exercices 1 4Malak KabbajPas encore d'évaluation
- Maths 1èrecDocument2 pagesMaths 1èrecYanoussa TEBAYAPas encore d'évaluation
- Annale Bac - TS2 - 26 - 05 - 2k15 - Daouda-NdongDocument315 pagesAnnale Bac - TS2 - 26 - 05 - 2k15 - Daouda-Ndongbibos8318Pas encore d'évaluation
- Solution Des Exercices - Énergie Cinétique - 1er S - SunudaaraDocument12 pagesSolution Des Exercices - Énergie Cinétique - 1er S - SunudaaraAmeth FallPas encore d'évaluation
- Chapitre 9 Angles Orientés Trigonométrie: Premières NotionsDocument10 pagesChapitre 9 Angles Orientés Trigonométrie: Premières NotionsJohan FaberPas encore d'évaluation
- Math Premier Cycle Ens Yaounde 2008Document2 pagesMath Premier Cycle Ens Yaounde 2008afrilanePas encore d'évaluation
- Correction - CCTL CPTEI P13 18012019Document8 pagesCorrection - CCTL CPTEI P13 18012019Luse AngePas encore d'évaluation
- CPTEI Veille Technologique - Grille Évaluation 2020Document6 pagesCPTEI Veille Technologique - Grille Évaluation 2020Luse AngePas encore d'évaluation
- Plaquette Ensiate Eleves 2020Document4 pagesPlaquette Ensiate Eleves 2020Luse AngePas encore d'évaluation
- Travaux Diriges N°4 Champs e Et BDocument4 pagesTravaux Diriges N°4 Champs e Et BLuse AngePas encore d'évaluation
- Cours Sciences de L'ingénieur1Document36 pagesCours Sciences de L'ingénieur1broukoPas encore d'évaluation
- Dimensionnement EscalierDocument3 pagesDimensionnement EscaliersalifsyPas encore d'évaluation
- Chap4 SMP5Document27 pagesChap4 SMP5Daoud El Caid100% (2)
- RakotondrabeTojonirinaJeanC ESPA MAST 19Document120 pagesRakotondrabeTojonirinaJeanC ESPA MAST 19Med ChePas encore d'évaluation
- Examen Normal Mécanique Du Point SMPC 2018 2019correctionDocument7 pagesExamen Normal Mécanique Du Point SMPC 2018 2019correctionRachif MesrarPas encore d'évaluation
- CHP 3 Analyse Vibratoire 2020Document52 pagesCHP 3 Analyse Vibratoire 2020Maram Sellami100% (1)
- Moam - Info - Generalites Sur Les Systemes Asservis - 59d0806f1723ddd8863ffcca - 2Document6 pagesMoam - Info - Generalites Sur Les Systemes Asservis - 59d0806f1723ddd8863ffcca - 2Islam LakatPas encore d'évaluation
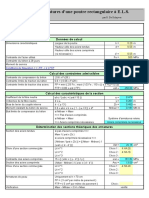
- POUTRE Rectangulaire en ELSDocument1 pagePOUTRE Rectangulaire en ELSHabibMoussaMohamedPas encore d'évaluation
- Solution de La Série de TD #01 Thermodynamique Des ÉquilibresDocument3 pagesSolution de La Série de TD #01 Thermodynamique Des ÉquilibresCherif LaifaPas encore d'évaluation
- BimeVete11 (Viscosite)Document16 pagesBimeVete11 (Viscosite)eva romePas encore d'évaluation
- Eota TR045Document17 pagesEota TR045Sofian30Pas encore d'évaluation
- Calcul Des Structures - Sollicitations-1Document9 pagesCalcul Des Structures - Sollicitations-1Diadji TallPas encore d'évaluation
- Serie3exrecices 150508154405 Lva1 App6891Document1 pageSerie3exrecices 150508154405 Lva1 App6891Youssef EL MliliPas encore d'évaluation
- Série N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21Document2 pagesSérie N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21AHMED ES-SAHELYPas encore d'évaluation
- Rheologie Dal MardDocument11 pagesRheologie Dal MardCHAHID MOHAMMEDPas encore d'évaluation
- Cinematique PDFDocument8 pagesCinematique PDFguetardPas encore d'évaluation
- Corrige de La Serie 6Document3 pagesCorrige de La Serie 6Achraf EnoualiPas encore d'évaluation
- Cours RDM 6 PDFDocument7 pagesCours RDM 6 PDFJeudi VeritéPas encore d'évaluation
- Boyer Regles CEM PCB v3Document16 pagesBoyer Regles CEM PCB v3thitanaPas encore d'évaluation
- Electrocinetique Regime Sinusoidal Force PDFDocument7 pagesElectrocinetique Regime Sinusoidal Force PDFDjawad Abi AyadPas encore d'évaluation
- 11 1c1Document7 pages11 1c1MOUNIA ELMANSORIPas encore d'évaluation
- Geometrie Masse 1 16Document16 pagesGeometrie Masse 1 16fz bfsPas encore d'évaluation
- Calcul Du Volume Utile 3Document65 pagesCalcul Du Volume Utile 3jack GNIMPas encore d'évaluation
- Note Bande Pleine RDCDocument14 pagesNote Bande Pleine RDCUlrich GBENOUPas encore d'évaluation
- Cours Hydraulique 82 La CompressibiliteDocument2 pagesCours Hydraulique 82 La CompressibiliteNestor ChiantsePas encore d'évaluation
- COURS Hydraulique Generale MEPA 2010Document85 pagesCOURS Hydraulique Generale MEPA 2010Bernard Palmer50% (2)
- Série 2 TD Thermodynamique AP2 2021 - 2022Document3 pagesSérie 2 TD Thermodynamique AP2 2021 - 2022Karima HamdanPas encore d'évaluation
- TP 6 Etude Reducteur Train EpicycloidalDocument12 pagesTP 6 Etude Reducteur Train EpicycloidalLAALAIFAICELPas encore d'évaluation