Vous aimerez peut-être aussi
- Chapitre 1 - Le Système de MotorisationDocument69 pagesChapitre 1 - Le Système de MotorisationNidal BestPas encore d'évaluation
- Fondamentaux de L'electricité Générale PDFDocument13 pagesFondamentaux de L'electricité Générale PDFKouakou Khan100% (2)
- TP 02 DuretéDocument7 pagesTP 02 DuretéNidal BestPas encore d'évaluation
- MoulageDocument11 pagesMoulagealphaPas encore d'évaluation
- Exam-MEF - ENSMM-2015 PDFDocument10 pagesExam-MEF - ENSMM-2015 PDFاشراقةاملPas encore d'évaluation
- Turbo ReacteurDocument11 pagesTurbo ReacteurNidal BestPas encore d'évaluation
- Compte Rendu TP N°2: Appareil D'Etude D'Une Enveloppe Epaisse - Ref Sm1011Document8 pagesCompte Rendu TP N°2: Appareil D'Etude D'Une Enveloppe Epaisse - Ref Sm1011Nidal BestPas encore d'évaluation
- E15Document11 pagesE15Nidal BestPas encore d'évaluation
- Support de Cours N°2 - ERDocument21 pagesSupport de Cours N°2 - ERNidal BestPas encore d'évaluation
- Concours 2012 (+sol.) Proposition EPST23Document19 pagesConcours 2012 (+sol.) Proposition EPST23Nidal BestPas encore d'évaluation
- Concours 2013 (+sol.) Proposition EPSTTDocument19 pagesConcours 2013 (+sol.) Proposition EPSTTNidal BestPas encore d'évaluation
- Enveloppe MinceDocument7 pagesEnveloppe MinceNidal BestPas encore d'évaluation
- 1 - Cours TriphaseDocument31 pages1 - Cours TriphaseNidal BestPas encore d'évaluation
- Ms GM Rabah+AddadDocument132 pagesMs GM Rabah+AddadNidal BestPas encore d'évaluation
- NT CLCLDocument7 pagesNT CLCLNidal BestPas encore d'évaluation
- Cours N°3-Hygiene-Et-SecuriteDocument73 pagesCours N°3-Hygiene-Et-SecuriteNidal BestPas encore d'évaluation
- TP EtorqueDocument27 pagesTP EtorqueNidal BestPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- Eléments de La CAODocument19 pagesEléments de La CAONidal BestPas encore d'évaluation
- Modélisation GéométriqueDocument15 pagesModélisation GéométriqueNidal BestPas encore d'évaluation
- Rapport de StageDocument12 pagesRapport de StageNidal Best100% (1)
- Techniques de Mesures Partie B Distance2020Document41 pagesTechniques de Mesures Partie B Distance2020Nidal BestPas encore d'évaluation
- Chaud RalDocument52 pagesChaud RalNidal BestPas encore d'évaluation
- Notice RDM Le Mans (Ossatures)Document5 pagesNotice RDM Le Mans (Ossatures)Nidal BestPas encore d'évaluation
- Chap 6Document7 pagesChap 6Nidal BestPas encore d'évaluation
- Glissement - FR - 2016 - Web PDFDocument196 pagesGlissement - FR - 2016 - Web PDFTuan NguyenPas encore d'évaluation
- TD 4 Et 5 Avec Correction 2022Document12 pagesTD 4 Et 5 Avec Correction 2022ABDELKADER SULTANE OFFICIELPas encore d'évaluation
- PROMO-MATHS Test 3Document3 pagesPROMO-MATHS Test 3CHETSA CédricPas encore d'évaluation
- Cheickna SackoDocument27 pagesCheickna SackoCheicknaPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015)Document4 pagesDevoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2014-2015)Batata bluePas encore d'évaluation
- Arpenteur Du Web MVT Lune Satellites JupiterDocument17 pagesArpenteur Du Web MVT Lune Satellites JupiterqwztjiorxsPas encore d'évaluation
- A Le Stator: - I PrésentationDocument24 pagesA Le Stator: - I PrésentationWiam MahboubPas encore d'évaluation
- Série D'exercices tcs2Document1 pageSérie D'exercices tcs2Série AsiatiquePas encore d'évaluation
- Electro 2Document2 pagesElectro 2LeavMenghuyPas encore d'évaluation
- Systeme D'amortisseur DELTADocument180 pagesSysteme D'amortisseur DELTABrice Patrice GollyPas encore d'évaluation
- Fiches Cesar 2d FR v1Document2 pagesFiches Cesar 2d FR v1Jasmin AgriPas encore d'évaluation
- Controle HydroDocument2 pagesControle HydroAnonymous 80p9OVPas encore d'évaluation
- TD2 CorDocument8 pagesTD2 Corzizou SaadaPas encore d'évaluation
- Pfe VRDDocument70 pagesPfe VRDkhalid ilalenPas encore d'évaluation
- Cours Hacheur SerieDocument15 pagesCours Hacheur SerieMaxence KouessiPas encore d'évaluation
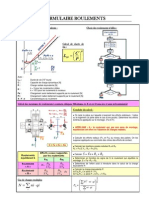
- RoulementsDocument1 pageRoulementsissatkaPas encore d'évaluation
- Thermique (1) - 10-19Document10 pagesThermique (1) - 10-19Amina YahuPas encore d'évaluation
- Chimie TP1 Correction Eleve EtalonnageDocument1 pageChimie TP1 Correction Eleve Etalonnageoxford33Pas encore d'évaluation
- 11 Lois Binom Poisson SolDocument4 pages11 Lois Binom Poisson SolSofiene GuedriPas encore d'évaluation
- 07 Calcul Numerique Scilab6Document16 pages07 Calcul Numerique Scilab6Esther YaroPas encore d'évaluation
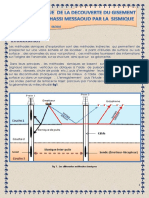
- Bref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La SismiqueDocument8 pagesBref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La Sismiquedjeddi mabrouk100% (3)
- Methodes Statistiques PDFDocument150 pagesMethodes Statistiques PDFsamirnet100% (2)
- 14 Matrices CorrigeDocument13 pages14 Matrices CorrigeAyoub MoustaouliPas encore d'évaluation
- Matériaux Pour Le Stockage de L'énergieDocument33 pagesMatériaux Pour Le Stockage de L'énergieWalid AbouloifaPas encore d'évaluation
- Phys FR 1 PDFDocument133 pagesPhys FR 1 PDFAbdelghaniBenMekki100% (1)
- LP203 2012 C8 PDFDocument22 pagesLP203 2012 C8 PDFBoujah Wel LimamPas encore d'évaluation
- SC L'équilibreDocument55 pagesSC L'équilibreMourad ThbPas encore d'évaluation