Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Examen 1 - GEL-4100 - A18Document7 pagesExamen 1 - GEL-4100 - A18Jean Philippe MoroPas encore d'évaluation
- Examen 1 - GEL-4250 - H21Document5 pagesExamen 1 - GEL-4250 - H21Hamza CHAIBOUBPas encore d'évaluation
- Examen 1 - GEL-4250 - H15Document5 pagesExamen 1 - GEL-4250 - H15Hamza CHAIBOUBPas encore d'évaluation
- Examen 1 - GEL-4250 - H16Document6 pagesExamen 1 - GEL-4250 - H16Hamza CHAIBOUBPas encore d'évaluation
- Examen 1 - GEL-4250 - H18Document7 pagesExamen 1 - GEL-4250 - H18Hamza CHAIBOUBPas encore d'évaluation
- Retour: NB: Les Formules de Cette Feuille Étant Protégées, Vous Ne Pouvez Jouer Que Sur Les Colonnes A, B Et CDocument2 pagesRetour: NB: Les Formules de Cette Feuille Étant Protégées, Vous Ne Pouvez Jouer Que Sur Les Colonnes A, B Et CMou BenPas encore d'évaluation
- Triaxial C-10Document81 pagesTriaxial C-10Linbert rcPas encore d'évaluation
- Panneau SolaireDocument7 pagesPanneau SolaireCROMBEZPas encore d'évaluation
- Maquinas Sincronas Polos LisosDocument54 pagesMaquinas Sincronas Polos LisosBiancaPas encore d'évaluation
- Triaxial C 6Document78 pagesTriaxial C 6diegoleonzuluagapa_9Pas encore d'évaluation
- Triaxial C 5Document78 pagesTriaxial C 5diegoleonzuluagapa_9Pas encore d'évaluation
- KadijaDocument6 pagesKadijaHANANE WAAZIZPas encore d'évaluation
- Toma A 6 CM: Distancia DistanciaDocument5 pagesToma A 6 CM: Distancia DistanciajuanPas encore d'évaluation
- Triaxial C 4Document76 pagesTriaxial C 4diegoleonzuluagapa_9Pas encore d'évaluation
- Loris Favier, Tableur Chapitre 15Document6 pagesLoris Favier, Tableur Chapitre 15loris.favier.jean.mermozPas encore d'évaluation
- Radiocristallographie TP3Document5 pagesRadiocristallographie TP3يا سينPas encore d'évaluation
- Compte Rendu de LA37 BDocument7 pagesCompte Rendu de LA37 BHunter AlexPas encore d'évaluation
- Everfine Goniophotometers System Test Report Page 1 of 13: Planar Isolux Diagram (Unit:Lx) S (M) 0 90 C (DEG)Document13 pagesEverfine Goniophotometers System Test Report Page 1 of 13: Planar Isolux Diagram (Unit:Lx) S (M) 0 90 C (DEG)Стефан ЈокићPas encore d'évaluation
- Activité CatalytiqueDocument35 pagesActivité CatalytiqueArthur ZhangPas encore d'évaluation
- Espectros de DiseñoDocument30 pagesEspectros de DiseñoSánchez Sánchez Diana LizethPas encore d'évaluation
- Utilitaire de CalculDocument52 pagesUtilitaire de CalculNacer IzriPas encore d'évaluation
- Profil ExactitudeDocument6 pagesProfil ExactitudeAbou Ishak DendaniPas encore d'évaluation
- Tablas DiodosDocument14 pagesTablas DiodosMario Ivan OnofrePas encore d'évaluation
- EssaiDocument22 pagesEssaiSHAMI KHALILPas encore d'évaluation
- DRIPDocument3 pagesDRIPqualimed area19 icuPas encore d'évaluation
- DripsDocument3 pagesDripsqualimed area19 icuPas encore d'évaluation
- Ansi Pipe ScheduleDocument9 pagesAnsi Pipe ScheduleИбрагим ИбрагимгаджиевPas encore d'évaluation
- Rapport Des TpsDocument22 pagesRapport Des TpsLatifa BounaarPas encore d'évaluation
- tp2 IdentificationDocument10 pagestp2 IdentificationSarra Sdiri100% (1)
- Ansi Pipe ScheduleDocument15 pagesAnsi Pipe Schedulekarabasan193Pas encore d'évaluation
- Série TD #01Document1 pageSérie TD #01oubechou oubechouPas encore d'évaluation
- Série TD N 01Document1 pageSérie TD N 01Khezazna SeifPas encore d'évaluation
- Exercice0701 CorrigeDocument12 pagesExercice0701 CorrigeparisPas encore d'évaluation
- Triaxial C 3Document81 pagesTriaxial C 3diegoleonzuluagapa_9Pas encore d'évaluation
- Grupo5 - Obras Hidraulicas EspecialesDocument138 pagesGrupo5 - Obras Hidraulicas EspecialesPamela Carolina Pesántez-CabreraPas encore d'évaluation
- Information: FeuilleDocument13 pagesInformation: FeuilleAmine HamikPas encore d'évaluation
- Tete AvaleDocument4 pagesTete AvaleKoukous MoussaPas encore d'évaluation
- DIFFUSDocument6 pagesDIFFUSmorchedtounsiPas encore d'évaluation
- Page 1 GNCTDocument1 pagePage 1 GNCTFitriyamirPas encore d'évaluation
- Fiche 06Document1 pageFiche 06f.kamy21Pas encore d'évaluation
- Fiche 06Document1 pageFiche 06f.kamy21Pas encore d'évaluation
- Tableau Des Epaisseur ANSIDocument1 pageTableau Des Epaisseur ANSImezianePas encore d'évaluation
- Charges ConduitesDocument1 pageCharges Conduitestl84ve31osdbzln3lg8Pas encore d'évaluation
- Fiche 06Document1 pageFiche 06nounouPas encore d'évaluation
- Charges ConduitesDocument1 pageCharges Conduitestl84ve31osdbzln3lg8Pas encore d'évaluation
- I ExamenFlotaciónDocument19 pagesI ExamenFlotaciónClaudia Fernanda Murrieta ZaratePas encore d'évaluation
- Calcul Des RIADocument8 pagesCalcul Des RIAMohamed Ilias HamaniPas encore d'évaluation
- CC - Capteurs Et Chaines 2023Document2 pagesCC - Capteurs Et Chaines 2023Fotcha EricPas encore d'évaluation
- ETUDE Préleminaire de La Fiabilite Loi Normale - DonnéesDocument9 pagesETUDE Préleminaire de La Fiabilite Loi Normale - Donnéeszalori nolarPas encore d'évaluation
- TP Turbo MachineDocument10 pagesTP Turbo MachineHoussem HouichiPas encore d'évaluation
- Acebutolol Comprimé Traitement Statistique StagiairesDocument3 pagesAcebutolol Comprimé Traitement Statistique StagiairesQueen BarbiePas encore d'évaluation
- Debite - SH Sag TimisoaraDocument11 pagesDebite - SH Sag TimisoaraMaria DuncaPas encore d'évaluation
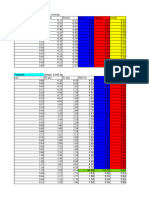
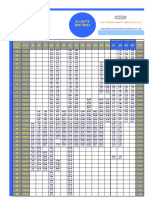
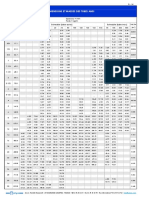
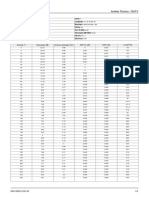
- Analise Técnica - FM/TV: Azimute (º) Atenuação (DB) Contorno Protegido (KM) ERP Az (KW) ERP (KW) % Erp PBDocument2 pagesAnalise Técnica - FM/TV: Azimute (º) Atenuação (DB) Contorno Protegido (KM) ERP Az (KW) ERP (KW) % Erp PBPéricles OliveiraPas encore d'évaluation
- Proj MedROE V UHFDocument6 pagesProj MedROE V UHFElmo Dutra FilhoPas encore d'évaluation
- Tabla de Lecturas GiroscopioDocument9 pagesTabla de Lecturas GiroscopioMarKo AvbPas encore d'évaluation
- Spa DimDocument1 pageSpa Dimmanuel alejandro ramos ortizPas encore d'évaluation
- Tableau Des ShedulesDocument1 pageTableau Des ShedulesFarid BouzayenPas encore d'évaluation
- PoutreDocument13 pagesPoutreAhmed GabiPas encore d'évaluation
- Fiche TD 2Document2 pagesFiche TD 2Naruto Ozomaki yayPas encore d'évaluation
- Série 3Document1 pageSérie 3Jean Philippe MoroPas encore d'évaluation
- Cours 04Document21 pagesCours 04asalmadPas encore d'évaluation
- Cours 02 - La Boucle de Régulation Et Régulateurs PIDDocument16 pagesCours 02 - La Boucle de Régulation Et Régulateurs PIDJean Philippe MoroPas encore d'évaluation
- DMAICDocument12 pagesDMAICJean Philippe MoroPas encore d'évaluation
- Cours Module 4Document18 pagesCours Module 4Jean Philippe MoroPas encore d'évaluation
- TD MX Solaire Serie N°3 Enoncé+SolutionDocument4 pagesTD MX Solaire Serie N°3 Enoncé+SolutionJalal TiYalPas encore d'évaluation
- Présentation Marrakech TelecomDocument20 pagesPrésentation Marrakech TelecomTarik TifaqPas encore d'évaluation
- Hardware 1Document13 pagesHardware 1Yasin .kPas encore d'évaluation
- Chapitre 7Document26 pagesChapitre 7Hamza ElgadiPas encore d'évaluation
- Chapitre3 ImageDocument25 pagesChapitre3 ImageIchrak Ben NejmaPas encore d'évaluation
- 9782307632092Document25 pages9782307632092Hassan AbaPas encore d'évaluation
- IMMFP01Document72 pagesIMMFP01Gigiblu100% (1)
- Signaux NumeriquesDocument4 pagesSignaux NumeriquesAmine AlaouiPas encore d'évaluation
- ExoDocument29 pagesExoMahj AyouPas encore d'évaluation
- MP106tgv - Inst - F MANUEL D INSTALLATION ET PROGRAMMATION PDFDocument68 pagesMP106tgv - Inst - F MANUEL D INSTALLATION ET PROGRAMMATION PDFMohsen Fazzani75% (4)
- TD Interconnexion ReseauxDocument3 pagesTD Interconnexion ReseauxCecile Pouwams100% (1)
- Charge CondensateurDocument2 pagesCharge CondensateurHadil SellamiPas encore d'évaluation
- Data Book TTLDocument15 pagesData Book TTLbenPas encore d'évaluation
- Introduction Générale de Puissance ÉlectroniqueDocument9 pagesIntroduction Générale de Puissance ÉlectroniqueChakib ZendaguiPas encore d'évaluation
- Chapitre 4Document6 pagesChapitre 4Kolawolé BAKARYPas encore d'évaluation
- Rapport PfaDocument58 pagesRapport PfaMed baskounPas encore d'évaluation
- Ouvrages Bibliotheque ENIMDocument71 pagesOuvrages Bibliotheque ENIMAbdennacer AyebPas encore d'évaluation
- Devoir TS972Document11 pagesDevoir TS972RahimoRhmPas encore d'évaluation
- TD Rdresseur Code MCCDocument4 pagesTD Rdresseur Code MCCESSADIKE ZAITAPas encore d'évaluation
- 17 Devis WifiDocument24 pages17 Devis WifiVE TOPas encore d'évaluation
- COURS Systemes Embarques PDFDocument33 pagesCOURS Systemes Embarques PDFseye abdou azizPas encore d'évaluation
- Les Imperfections de L Oeil 2Document5 pagesLes Imperfections de L Oeil 2s18db911Pas encore d'évaluation
- gtr3 - 15 09 2023Document1 pagegtr3 - 15 09 2023OUMAIMA LYOUSFIPas encore d'évaluation
- Projet D'integrationDocument14 pagesProjet D'integrationMohamadou FabilouPas encore d'évaluation
- Chap3 Gpio Addr RegDocument49 pagesChap3 Gpio Addr RegNadhem Rusty AbidiPas encore d'évaluation
- Chapitre 3 Architecture Base OrdinateursDocument87 pagesChapitre 3 Architecture Base OrdinateursJudicaël SekaPas encore d'évaluation
- TD1 Electronique Numerique 2023Document3 pagesTD1 Electronique Numerique 2023wjdj832Pas encore d'évaluation
- Notions FondamentalesDocument26 pagesNotions FondamentalesAhmed HasbellaouiPas encore d'évaluation
- 1a Sei Teleinfoet Reseaux Info (2016-2017) @formateur OkDocument56 pages1a Sei Teleinfoet Reseaux Info (2016-2017) @formateur OkLouis KouassiPas encore d'évaluation
- Livret 4A Cahier Cours-FINALDocument160 pagesLivret 4A Cahier Cours-FINALHmidi Fredj100% (7)
- Scrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!D'EverandScrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!Pas encore d'évaluation
- Le Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsD'EverandLe Minage De Bitcoin 101: Le Guide du Débutant de Bitcoin Pour Faire de L'argent Avec Des BitcoinsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Le must bilingue™ des courriels professionnels: Le guide de référence des mails en anglaisD'EverandLe must bilingue™ des courriels professionnels: Le guide de référence des mails en anglaisÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le sablier d or: ou le temps universel entre le sable d hier et celui de demainD'EverandLe sablier d or: ou le temps universel entre le sable d hier et celui de demainPas encore d'évaluation
- Méca-génius formation présente: Le fonctionnement du système d'injection électronique d'une motoD'EverandMéca-génius formation présente: Le fonctionnement du système d'injection électronique d'une motoPas encore d'évaluation
- Longboard Dancing - Figures et Pas de Danse - RegularD'EverandLongboard Dancing - Figures et Pas de Danse - RegularPas encore d'évaluation