Vous aimerez peut-être aussi
- Cours Circuit SéquentielDocument22 pagesCours Circuit SéquentielMelina AggarPas encore d'évaluation
- CH03 Cours Systèmes LogiquesDocument11 pagesCH03 Cours Systèmes Logiquesbrix brainPas encore d'évaluation
- Chapitre 4 Bascules V - EnseignantDocument6 pagesChapitre 4 Bascules V - Enseignantaziz bensaid2Pas encore d'évaluation
- Chap 4 Logique Séq 2020Document14 pagesChap 4 Logique Séq 2020Ali DridiPas encore d'évaluation
- Microprocess EurDocument24 pagesMicroprocess EurBOURAS Ihabe - بوراس إيهابPas encore d'évaluation
- MicroprocesseurDocument24 pagesMicroprocesseurmounaPas encore d'évaluation
- Chapi CIRCUITS LOGIQUES L1GInfo&GEI 2021-2022Document19 pagesChapi CIRCUITS LOGIQUES L1GInfo&GEI 2021-2022Zaza RatsiPas encore d'évaluation
- TP N°1Document21 pagesTP N°1benjomàa maissa100% (1)
- Document EleveDocument13 pagesDocument EleveakremibechirPas encore d'évaluation
- 2 - Circuits LogiquesDocument6 pages2 - Circuits Logiquesharold ChoudjaPas encore d'évaluation
- Cours de Bascules Numériques 2021-22Document23 pagesCours de Bascules Numériques 2021-22Manel AsnicarPas encore d'évaluation
- GTEE Partie 2Document22 pagesGTEE Partie 2Les trucs qui marchent vraiment 2020Pas encore d'évaluation
- Chapire I La Logique SéquentielleDocument8 pagesChapire I La Logique SéquentielleMouhamed MoustaphaPas encore d'évaluation
- Cours de Bascules Numériques 2017-2018Document28 pagesCours de Bascules Numériques 2017-2018Camile SiliaPas encore d'évaluation
- TP 2 AutomatismeDocument14 pagesTP 2 AutomatismeAmine MalihPas encore d'évaluation
- Cours Logiques Sequentielles Les Bascules SynchronesDocument12 pagesCours Logiques Sequentielles Les Bascules SynchronesCephas WogninPas encore d'évaluation
- Ch10 CI11 I11 SequentielleDocument8 pagesCh10 CI11 I11 Sequentiellecpommier100% (1)
- Cours Sur Les Bascules PDFDocument4 pagesCours Sur Les Bascules PDFAmineAb100% (1)
- Chap5 Systèmes Séquentiels 2016Document11 pagesChap5 Systèmes Séquentiels 2016MOHAMED AIT HADDOUCHPas encore d'évaluation
- Chap 3 Les Bascules Syst Log 2Document8 pagesChap 3 Les Bascules Syst Log 2mohamed ben slimanePas encore d'évaluation
- Présentation CL Cours6aDocument40 pagesPrésentation CL Cours6aBird 9Pas encore d'évaluation
- Logique SequentielleDocument28 pagesLogique SequentielleIkram ElaimaPas encore d'évaluation
- Cours Bascule CompteurDocument34 pagesCours Bascule CompteurFabiol TchiffoPas encore d'évaluation
- Bascule SDocument6 pagesBascule SYahya ElamraniPas encore d'évaluation
- BasculeDocument18 pagesBasculeMohamed HahiouiPas encore d'évaluation
- Circuits Logiques Séquentiels 1Document5 pagesCircuits Logiques Séquentiels 1Antonio SabaPas encore d'évaluation
- Chapitre IV 1Document64 pagesChapitre IV 1Monxef BlrPas encore d'évaluation
- 02 - Logique SequentielleDocument43 pages02 - Logique SequentielleouissemPas encore d'évaluation
- Circuits SéquentielDocument27 pagesCircuits SéquentielasmaPas encore d'évaluation
- 13 BasculesDocument5 pages13 BasculesZakaria GhazizPas encore d'évaluation
- Bascule CRDocument5 pagesBascule CRAbdourazak AbouPas encore d'évaluation
- Chapitre4 BasculesDocument20 pagesChapitre4 BasculeskhlifiPas encore d'évaluation
- Logique-Sequentielle ESTM GE GIMDocument36 pagesLogique-Sequentielle ESTM GE GIMCrateFXPas encore d'évaluation
- BasculesDocument19 pagesBasculesMahdi LahdiliPas encore d'évaluation
- 1-Architecture Chapitre 1-4Document35 pages1-Architecture Chapitre 1-4Mounaim AaouadouPas encore d'évaluation
- Chapitre 4Document8 pagesChapitre 4rajakrifaPas encore d'évaluation
- ch2 - C - Logiques Séquentiels (Complet)Document85 pagesch2 - C - Logiques Séquentiels (Complet)DønuTsPas encore d'évaluation
- Logique SequentielleDocument7 pagesLogique SequentielleMoustapha Sall100% (1)
- Ch2 Log SequentielleDocument12 pagesCh2 Log SequentielleHana KhemissiPas encore d'évaluation
- Présentation Logique SequentielleDocument50 pagesPrésentation Logique SequentiellemohPas encore d'évaluation
- Logique Sequentielle Partie 1 CoursDocument8 pagesLogique Sequentielle Partie 1 Coursfehmi001Pas encore d'évaluation
- Amlal Annoukhaili TP02Document13 pagesAmlal Annoukhaili TP02Amine MalihPas encore d'évaluation
- ch5 CircuitssequentielsDocument14 pagesch5 CircuitssequentielsHicham Edd0% (1)
- Chapitre 1 - Rappel Sur Les Circuits SéquentielsDocument18 pagesChapitre 1 - Rappel Sur Les Circuits SéquentielsTtech hackPas encore d'évaluation
- Une Bascule Ou Un Basculeur Est Un Circuit Intégré Logique Doté DDocument7 pagesUne Bascule Ou Un Basculeur Est Un Circuit Intégré Logique Doté DvyasnaikoPas encore d'évaluation
- Bascule (Circuit Logique)Document8 pagesBascule (Circuit Logique)Maella AdjPas encore d'évaluation
- 04 Introduction Aux Circuits Séquentiels 01Document10 pages04 Introduction Aux Circuits Séquentiels 01Poupée De SoiePas encore d'évaluation
- Les Circuits SéquentielsDocument14 pagesLes Circuits SéquentielsJOHNE JKPas encore d'évaluation
- 07 - Initiation À La Logique SéquentielleDocument12 pages07 - Initiation À La Logique SéquentielleRafiRafiPas encore d'évaluation
- Cours E Logique Sequentielle Fonction MemorisationDocument14 pagesCours E Logique Sequentielle Fonction MemorisationMhammed ElhoussiniPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TP1 - Intromatlab by MeDocument51 pagesTP1 - Intromatlab by Melodyyy4Pas encore d'évaluation
- Les Techniques de La CommunicationDocument8 pagesLes Techniques de La Communicationlodyyy4Pas encore d'évaluation
- Omar MoutabirDocument5 pagesOmar Moutabirlodyyy4Pas encore d'évaluation
- Probabilite Et Variable Aleatoire pdf1Document7 pagesProbabilite Et Variable Aleatoire pdf1Akadiri HonfoPas encore d'évaluation
- Entretien Et Depannage PDFDocument157 pagesEntretien Et Depannage PDFMãl ÎkPas encore d'évaluation
- Les Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableDocument2 pagesLes Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableHello HelloPas encore d'évaluation
- Devoir SondeDocument6 pagesDevoir Sondewassime FassiPas encore d'évaluation
- Factures Etudes 2014Document14 pagesFactures Etudes 2014Achour SiderPas encore d'évaluation
- CE WOURI EXAM BLANC PROB IH AVRIL 2024Document2 pagesCE WOURI EXAM BLANC PROB IH AVRIL 2024Valere DJOHPas encore d'évaluation
- Routiers: Prévention D'effondrement Liés Souterraines Solution Renforcement RemblaisDocument12 pagesRoutiers: Prévention D'effondrement Liés Souterraines Solution Renforcement RemblaisPaul Zephyrin AwonaPas encore d'évaluation
- Activite 2 5e Semaine 1Document2 pagesActivite 2 5e Semaine 1Aboubacar KountaPas encore d'évaluation
- 09 Cours Statistiques Pourcentages ProbabiliteDocument19 pages09 Cours Statistiques Pourcentages ProbabiliteOtmane LhmPas encore d'évaluation
- Compact NSX PDFDocument50 pagesCompact NSX PDFMouna BoujelbenPas encore d'évaluation
- Document - Unique - Evaluation - Risques - Professionnels ZMDocument11 pagesDocument - Unique - Evaluation - Risques - Professionnels ZMMariano OKEPas encore d'évaluation
- Referentiel Construction Universitaire-1Document18 pagesReferentiel Construction Universitaire-1BCPas encore d'évaluation
- HTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensDocument40 pagesHTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensMEDARBEL AbdelkrimPas encore d'évaluation
- Kitchen Xtone 2023Document89 pagesKitchen Xtone 2023Murat KanberoğluPas encore d'évaluation
- Transfert de Chaleur Par Rayonnement1 PDFDocument31 pagesTransfert de Chaleur Par Rayonnement1 PDFDemba SyllaPas encore d'évaluation
- Dépannage Des Différentes Parties Des Machines ÉlectriquesDocument18 pagesDépannage Des Différentes Parties Des Machines ÉlectriquesNtui Junior71% (7)
- Cours de MR Cailler Épistémologie de La Communication Des OrganisationsDocument30 pagesCours de MR Cailler Épistémologie de La Communication Des OrganisationsNicolasAPas encore d'évaluation
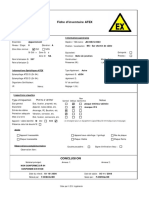
- Fiche D'inventaire ATEX: Informations Générales Appontement EnvironnementDocument2 pagesFiche D'inventaire ATEX: Informations Générales Appontement EnvironnementMohammed DjelailiPas encore d'évaluation
- Formations Qshe PDFDocument4 pagesFormations Qshe PDFfieti zlatanPas encore d'évaluation
- Grimoire Magie Terre BLANCDocument38 pagesGrimoire Magie Terre BLANCflorent34150100% (2)
- Méthode de Résolution de Problèmes Et Outils AssociésDocument17 pagesMéthode de Résolution de Problèmes Et Outils AssociésbinlinPas encore d'évaluation
- SVT 3ème - L10 - La Dégradation Du SolDocument7 pagesSVT 3ème - L10 - La Dégradation Du SolYVESPas encore d'évaluation
- Devoir de Contrôle N°1 - Algorithmique - Bac Informatique (2012-2013) Mme Mediha Sfar PDFDocument2 pagesDevoir de Contrôle N°1 - Algorithmique - Bac Informatique (2012-2013) Mme Mediha Sfar PDFAyoub AbidPas encore d'évaluation
- Cours 2 Capteurs MEMSDocument9 pagesCours 2 Capteurs MEMSTurbo NSXPas encore d'évaluation
- Cours Phonolgie 2LMD - 3Document15 pagesCours Phonolgie 2LMD - 3Ouassila DjekidaPas encore d'évaluation
- Comment La Sociologie Explique-T-Elle Les Comportements Criminels?Document2 pagesComment La Sociologie Explique-T-Elle Les Comportements Criminels?Nicolas Nolivos100% (1)
- CM1 L9 Ranger Des Fractions Simples 2020Document3 pagesCM1 L9 Ranger Des Fractions Simples 2020koss koss100% (1)
- Les Interjections Et Les Onomatopées - Quelle Est La Richesse Apportée Par Leur Utilisation Dans La Bande DessinéeDocument18 pagesLes Interjections Et Les Onomatopées - Quelle Est La Richesse Apportée Par Leur Utilisation Dans La Bande DessinéePinar SezerPas encore d'évaluation
- Poutre Hyperstatique Encastrée Et Uniformément Chargée: Iset KelibiaDocument7 pagesPoutre Hyperstatique Encastrée Et Uniformément Chargée: Iset KelibiaRayen ElloumiPas encore d'évaluation
- Beer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsDocument7 pagesBeer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsJean-Serein MbendePas encore d'évaluation
- Vibration SystemsDocument24 pagesVibration SystemsaliPas encore d'évaluation