Vous aimerez peut-être aussi
- Polycopie TPDocument22 pagesPolycopie TPWalidAdrarPas encore d'évaluation
- TP Dspace Buck Boost InverseurDocument5 pagesTP Dspace Buck Boost Inverseursami debbachePas encore d'évaluation
- Initiation Au Système dSPACE, de L'interface RTI Dans Simulink Et de ControlDesk Next Generation 5.4 Version 2.0 PDFDocument19 pagesInitiation Au Système dSPACE, de L'interface RTI Dans Simulink Et de ControlDesk Next Generation 5.4 Version 2.0 PDFAhmed BensaadaPas encore d'évaluation
- Elen0037 Labo1Document39 pagesElen0037 Labo1DominiquePas encore d'évaluation
- TP15 16 Decouv Noyau13 14Document7 pagesTP15 16 Decouv Noyau13 14Achraf BenbaPas encore d'évaluation
- TD Complet Reseau2 1314Document15 pagesTD Complet Reseau2 1314Georges Le Mignon OlePas encore d'évaluation
- Tpinfo741 ArduinoitDocument2 pagesTpinfo741 ArduinoitKARKAR NORAPas encore d'évaluation
- Travaux Pratiques - Microprocesseurs Microcontrôleurs PDFDocument13 pagesTravaux Pratiques - Microprocesseurs Microcontrôleurs PDFGoufi Aouf0% (1)
- 00 Présentation Générale 7PCGDocument61 pages00 Présentation Générale 7PCGSalvador FayssalPas encore d'évaluation
- Materiel TP Processeurs de SignauxDocument10 pagesMateriel TP Processeurs de SignauxTonprince Knight AdPas encore d'évaluation
- TP4 Application Pratique Des Files D'attente Avec Les Périphériques Du PIC24FDocument15 pagesTP4 Application Pratique Des Files D'attente Avec Les Périphériques Du PIC24FABDESSAMAD EL YOUSFYPas encore d'évaluation
- Rapport Mplab PDFDocument12 pagesRapport Mplab PDFSimo AbkariPas encore d'évaluation
- Ter LTSPDocument48 pagesTer LTSPMajid ChaffaiPas encore d'évaluation
- Efm V02Document2 pagesEfm V02ahmed ridaPas encore d'évaluation
- TD Complet Reseau2 1112Document15 pagesTD Complet Reseau2 1112Salah Gharbi100% (1)
- Travaux Dirigés FPGA & VHDL - 2Document28 pagesTravaux Dirigés FPGA & VHDL - 2simohamed1993Pas encore d'évaluation
- Travaux Dirigés FPGA & VHDLDocument28 pagesTravaux Dirigés FPGA & VHDLR.s. Félix75% (4)
- Sujet Projet M4207CDocument3 pagesSujet Projet M4207CMondesir Juvenal DKPas encore d'évaluation
- Cours Présentation Générale Logiciel TCGDocument68 pagesCours Présentation Générale Logiciel TCGfayssal salvadorPas encore d'évaluation
- TMC TP 4 2022 2023Document6 pagesTMC TP 4 2022 2023Omar CheikhrouhouPas encore d'évaluation
- TP1-ΜC - Prise en MainDocument17 pagesTP1-ΜC - Prise en MainNabil EL KassoumiPas encore d'évaluation
- Dspace ImportantDocument27 pagesDspace ImportantAymen OmariPas encore d'évaluation
- EFM CCNA4 v4Document3 pagesEFM CCNA4 v4Ikram Atik0% (2)
- EFM CCNA4 v4Document3 pagesEFM CCNA4 v4Ikram Atik0% (2)
- ReadmeDocument15 pagesReadmeMed MadridPas encore d'évaluation
- 516 PresentationDocument19 pages516 PresentationRosu SilviaPas encore d'évaluation
- Compte Rendu TP1 VHDLDocument8 pagesCompte Rendu TP1 VHDLboussaoud.oualidPas encore d'évaluation
- TP N 4Document7 pagesTP N 4ali18abidPas encore d'évaluation
- Prepasujet2 E52Document3 pagesPrepasujet2 E52Poubelle TrashPas encore d'évaluation
- La Programmation Des PIC en C (Le Temp D'horloge) PDFDocument19 pagesLa Programmation Des PIC en C (Le Temp D'horloge) PDFNisou ProPas encore d'évaluation
- Cours Emi Micro 2020 (Microp CHP 1,2,3)Document15 pagesCours Emi Micro 2020 (Microp CHP 1,2,3)Youssef El AjraouiPas encore d'évaluation
- EFM VirtualisationDocument5 pagesEFM VirtualisationzbaylzamlPas encore d'évaluation
- Bafr Catalogue Formation TwincatDocument20 pagesBafr Catalogue Formation TwincataszdcfsefPas encore d'évaluation
- A Tutorial Introduction To ControlDocument38 pagesA Tutorial Introduction To ControlSamba GueyePas encore d'évaluation
- R4P Pin DamienDocument4 pagesR4P Pin DamienAchchabPas encore d'évaluation
- TIA Formation CPU 315-2DPDocument23 pagesTIA Formation CPU 315-2DPМхамед Аит АбдерахманPas encore d'évaluation
- TP Sockets UdpDocument20 pagesTP Sockets UdpAouatif AouatifoPas encore d'évaluation
- PIC en C - TempsDocument19 pagesPIC en C - TempsFarah MahdiaPas encore d'évaluation
- Poly TPDocument14 pagesPoly TPIma AutPas encore d'évaluation
- Rts TPDocument31 pagesRts TPMarc NdanjiPas encore d'évaluation
- TP Reseaux 1 IpDocument5 pagesTP Reseaux 1 Ipabdel dalilPas encore d'évaluation
- Fascicules TP 11 - V2 (1) RadhwenDocument117 pagesFascicules TP 11 - V2 (1) Radhwenservice électricité bâtimentPas encore d'évaluation
- TP7 - MPLS VPN+++++Document21 pagesTP7 - MPLS VPN+++++ysfhlePas encore d'évaluation
- TP de Prise en Main de Uc - OS-IIDocument11 pagesTP de Prise en Main de Uc - OS-IIAnis KarouiPas encore d'évaluation
- TP Sockets TCP LinuxDocument24 pagesTP Sockets TCP LinuxAouatif AouatifoPas encore d'évaluation
- 2.1.4.7 Lab - Establishing A Console Session With Tera TermDocument11 pages2.1.4.7 Lab - Establishing A Console Session With Tera Termaicha Guefrachi100% (1)
- TFTPDocument7 pagesTFTPapi-359420495Pas encore d'évaluation
- TP Uc877 SAADAOUI Vide À CompléterDocument8 pagesTP Uc877 SAADAOUI Vide À CompléterBenkilani RimPas encore d'évaluation
- TG MicrocontrolDocument8 pagesTG MicrocontrolrahmaboufalghaPas encore d'évaluation
- Travaux Pratiques - Microprocesseurs MicrocontrôleursDocument11 pagesTravaux Pratiques - Microprocesseurs MicrocontrôleursMila zPas encore d'évaluation
- Tpssupindus - v1 - Avec Wincc 2ge-Aii Chaoui 2020-2021Document75 pagesTpssupindus - v1 - Avec Wincc 2ge-Aii Chaoui 2020-2021Fettah GuarnaouiPas encore d'évaluation
- TSTL SPCL Contrôler Un Moteur Pas À Pas Avec ArduinoDocument6 pagesTSTL SPCL Contrôler Un Moteur Pas À Pas Avec Arduinonew technologyPas encore d'évaluation
- Documentation Technique PDFDocument8 pagesDocumentation Technique PDFEslem IslamPas encore d'évaluation
- Tns Compte RenduDocument41 pagesTns Compte RendubadrPas encore d'évaluation
- TP - Asterisk - SCCP de Cheikh MbengueDocument17 pagesTP - Asterisk - SCCP de Cheikh MbengueINFORMATIQUE POUR TOUSPas encore d'évaluation
- TP Prise en Main UnityDocument10 pagesTP Prise en Main UnityNabil Lee100% (2)
- Spring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplateD'EverandSpring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplatePas encore d'évaluation
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLD'EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- test6 (7)Document90 pagestest6 (7)Âh MèdPas encore d'évaluation
- These Romain DELPOUXDocument173 pagesThese Romain DELPOUXÂh MèdPas encore d'évaluation
- EC812 Cmde Annales2017Document22 pagesEC812 Cmde Annales2017Âh MèdPas encore d'évaluation
- test6 (7)Document90 pagestest6 (7)Âh MèdPas encore d'évaluation
- EC812 Cmde Annales2017Document22 pagesEC812 Cmde Annales2017Âh MèdPas encore d'évaluation
- Commande - Des.machines - Chap1.introduction 2020Document79 pagesCommande - Des.machines - Chap1.introduction 2020Abdø AboulQasimPas encore d'évaluation
- Compte Rendu de TP 02 - EC842Document19 pagesCompte Rendu de TP 02 - EC842Âh MèdPas encore d'évaluation
- Compte Rendu de TP 02 - EC842Document19 pagesCompte Rendu de TP 02 - EC842Âh MèdPas encore d'évaluation
- Correction Du TD Représentation D'étatDocument5 pagesCorrection Du TD Représentation D'étatÂh MèdPas encore d'évaluation
- Représentation D'état Des Systèmes ÉchantillonnésDocument10 pagesReprésentation D'état Des Systèmes ÉchantillonnésÂh MèdPas encore d'évaluation
- Commande Numérique de Systèmes Discrets (Part 01)Document12 pagesCommande Numérique de Systèmes Discrets (Part 01)Âh MèdPas encore d'évaluation
- Correction Du TD Représentation D'étatDocument5 pagesCorrection Du TD Représentation D'étatÂh MèdPas encore d'évaluation
- TP02b - EC - 842 - Modélisation Et Simulation Du MSAPDocument4 pagesTP02b - EC - 842 - Modélisation Et Simulation Du MSAPÂh Mèd100% (1)
- Ge MeaDocument89 pagesGe MeaKheira NiatiPas encore d'évaluation
- Solution TD N°2 Réseaux ÉlectriqueDocument5 pagesSolution TD N°2 Réseaux ÉlectriqueÂh MèdPas encore d'évaluation
- Tpgénératrice IndependanteDocument5 pagesTpgénératrice IndependanteÂh Mèd100% (1)
- TD N°2 Réseaux ÉlectriqueDocument2 pagesTD N°2 Réseaux ÉlectriqueÂh MèdPas encore d'évaluation
- TD N°1 RéseauxDocument2 pagesTD N°1 RéseauxÂh MèdPas encore d'évaluation
- Devoir de Contrôle N°1 - Algorithmique - Bac Informatique (2012-2013) Mme Mediha Sfar PDFDocument2 pagesDevoir de Contrôle N°1 - Algorithmique - Bac Informatique (2012-2013) Mme Mediha Sfar PDFAyoub AbidPas encore d'évaluation
- Vibration SystemsDocument24 pagesVibration SystemsaliPas encore d'évaluation
- Document - Unique - Evaluation - Risques - Professionnels ZMDocument11 pagesDocument - Unique - Evaluation - Risques - Professionnels ZMMariano OKEPas encore d'évaluation
- Convection Forcee Dans Des Surfaces PlanDocument8 pagesConvection Forcee Dans Des Surfaces Planim enePas encore d'évaluation
- Compte Rendu FonderieDocument9 pagesCompte Rendu FonderiedmedmahdiPas encore d'évaluation
- Les Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableDocument2 pagesLes Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableHello HelloPas encore d'évaluation
- Dissertation Natygane de Jaegher VFDocument17 pagesDissertation Natygane de Jaegher VFNatygane De JaegherPas encore d'évaluation
- Devoir de Contrôle N°3 - Math - 3ème Math (2017-2018) MR Meddeb TarekDocument2 pagesDevoir de Contrôle N°3 - Math - 3ème Math (2017-2018) MR Meddeb TarekChaker Ben MahmoudPas encore d'évaluation
- Entretien Et Depannage PDFDocument157 pagesEntretien Et Depannage PDFMãl ÎkPas encore d'évaluation
- Comment La Sociologie Explique-T-Elle Les Comportements Criminels?Document2 pagesComment La Sociologie Explique-T-Elle Les Comportements Criminels?Nicolas Nolivos100% (1)
- Méthode de Résolution de Problèmes Et Outils AssociésDocument17 pagesMéthode de Résolution de Problèmes Et Outils AssociésbinlinPas encore d'évaluation
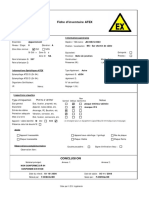
- Fiche D'inventaire ATEX: Informations Générales Appontement EnvironnementDocument2 pagesFiche D'inventaire ATEX: Informations Générales Appontement EnvironnementMohammed DjelailiPas encore d'évaluation
- Projet de Thèse - Mamadou COULIBALYDocument5 pagesProjet de Thèse - Mamadou COULIBALYMamadou CoulibalyPas encore d'évaluation
- Sujet TravailDocument2 pagesSujet TravaillotfiPas encore d'évaluation
- Grimoire Magie Terre BLANCDocument38 pagesGrimoire Magie Terre BLANCflorent34150100% (2)
- Devoir SondeDocument6 pagesDevoir Sondewassime FassiPas encore d'évaluation
- Livre MMCDocument172 pagesLivre MMCFRANCKY JORDAN NJOCKE NDIKIPas encore d'évaluation
- 09 Cours Statistiques Pourcentages ProbabiliteDocument19 pages09 Cours Statistiques Pourcentages ProbabiliteOtmane LhmPas encore d'évaluation
- Activite 2 5e Semaine 1Document2 pagesActivite 2 5e Semaine 1Aboubacar KountaPas encore d'évaluation
- Cours 2 Capteurs MEMSDocument9 pagesCours 2 Capteurs MEMSTurbo NSXPas encore d'évaluation
- Dépannage Des Différentes Parties Des Machines ÉlectriquesDocument18 pagesDépannage Des Différentes Parties Des Machines ÉlectriquesNtui Junior71% (7)
- Formations Qshe PDFDocument4 pagesFormations Qshe PDFfieti zlatanPas encore d'évaluation
- AP FonctionsDocument2 pagesAP FonctionsMarlèneAndrieuPas encore d'évaluation
- 1 - Contrôle Et ManagementDocument23 pages1 - Contrôle Et ManagementlolaPas encore d'évaluation
- SVT 3ème - L10 - La Dégradation Du SolDocument7 pagesSVT 3ème - L10 - La Dégradation Du SolYVESPas encore d'évaluation
- Devoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarDocument3 pagesDevoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarimedPas encore d'évaluation
- Epistémologie Des Sciences HumainesDocument2 pagesEpistémologie Des Sciences HumainesmeldimanchePas encore d'évaluation
- Referentiel Construction Universitaire-1Document18 pagesReferentiel Construction Universitaire-1BCPas encore d'évaluation
- Beer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsDocument7 pagesBeer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsJean-Serein MbendePas encore d'évaluation
- Cours Phonolgie 2LMD - 3Document15 pagesCours Phonolgie 2LMD - 3Ouassila DjekidaPas encore d'évaluation