Vous aimerez peut-être aussi
- 2 - Communication TechniqueDocument90 pages2 - Communication TechniqueAhlèm SààdàouiPas encore d'évaluation
- Act (Fraiseuse Universelle) P137-142Document6 pagesAct (Fraiseuse Universelle) P137-142Kereme JulienPas encore d'évaluation
- ds20304r1 ModelDocument14 pagesds20304r1 ModelChokri Atef50% (2)
- Distribution EW10J4Document17 pagesDistribution EW10J4handelsbanker100% (1)
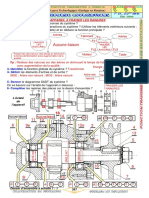
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- Machine de Debitage de Ceintures: Matière: Science de L'ingénieur Cœfficient: 3 Section: Sciences Maths BDocument11 pagesMachine de Debitage de Ceintures: Matière: Science de L'ingénieur Cœfficient: 3 Section: Sciences Maths Bdamia mohammedPas encore d'évaluation
- EMBRAYAGETDESADocument10 pagesEMBRAYAGETDESAHafida EnnajiPas encore d'évaluation
- Boite Vitesse Mini Projet (Imad)Document16 pagesBoite Vitesse Mini Projet (Imad)Houari Haouche60% (5)
- Explication Différentiel AutomobileDocument6 pagesExplication Différentiel AutomobileAndriatsirihasinaPas encore d'évaluation
- 2 Éme Cours de Dessin Industriel 3 CMDocument14 pages2 Éme Cours de Dessin Industriel 3 CMMohamed IsLemPas encore d'évaluation
- Distri Xu10j4rsDocument10 pagesDistri Xu10j4rsdamienm49Pas encore d'évaluation
- Mortaiseuse À ChaîneDocument10 pagesMortaiseuse À ChaîneRihab KoukiPas encore d'évaluation
- Fiche Sur Lecture Dun Dessin Densemble 1 PDFDocument9 pagesFiche Sur Lecture Dun Dessin Densemble 1 PDFSonia SalahPas encore d'évaluation
- FraisageDocument12 pagesFraisageWijdane El MoussaidPas encore d'évaluation
- 16 DirectionDocument4 pages16 Directionaline leonardPas encore d'évaluation
- DT1 2020 Mechanical R2018Document7 pagesDT1 2020 Mechanical R2018Fethi BenmassoudePas encore d'évaluation
- Tour Parallèle 2 PDFDocument6 pagesTour Parallèle 2 PDFAbi ClémentPas encore d'évaluation
- EnrenagesDocument4 pagesEnrenagesBouabdellaoui saif ennasrPas encore d'évaluation
- Ouvre Barriere SinusmaticDocument6 pagesOuvre Barriere SinusmaticmoumouPas encore d'évaluation
- 13-Liaison Pivot-Acti - p40-p48 - RepDocument11 pages13-Liaison Pivot-Acti - p40-p48 - RepESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Verins Maintien COURS CORRIGEDocument7 pagesVerins Maintien COURS CORRIGEDog RayzPas encore d'évaluation
- 228460P02 PDFDocument159 pages228460P02 PDFsldwPas encore d'évaluation
- Bts Construction Mecanique Mka 2019 Sujet1Document13 pagesBts Construction Mecanique Mka 2019 Sujet1Bernard Mbotchack100% (1)
- Boite de Vitesse - PDF Version 1Document166 pagesBoite de Vitesse - PDF Version 1Manu LatambasPas encore d'évaluation
- 14-Liaison Pivot - EXDocument8 pages14-Liaison Pivot - EXN'GOLO MAMADOU KONEPas encore d'évaluation
- Palier Carter AutoporteeDocument4 pagesPalier Carter AutoporteeMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Thème 3 Appareil À Brosser Les PatinsDocument4 pagesThème 3 Appareil À Brosser Les PatinsKenou LaudincePas encore d'évaluation
- EMCO Compact 8 ManuelDocument45 pagesEMCO Compact 8 Manuelrommelgaspar100% (1)
- ds1 0506 PDFDocument14 pagesds1 0506 PDFzaouia ayoubPas encore d'évaluation
- TD Conception MécaniqueDocument10 pagesTD Conception MécaniqueConception & Fabrication Mécanique100% (1)
- Cours - Génie Mécanique - Roues de Friction Variateur de Vitesse - 3ème Technique (2015-2016) MR HAMDOUNI SabeurDocument8 pagesCours - Génie Mécanique - Roues de Friction Variateur de Vitesse - 3ème Technique (2015-2016) MR HAMDOUNI SabeurRouaissi Ridha100% (1)
- 2ti ds1 2019Document4 pages2ti ds1 2019Besbes ZiedPas encore d'évaluation
- Rapport THSADocument59 pagesRapport THSAayoub fsaPas encore d'évaluation
- Sujet 5 Mécanisme de Transmission CorrectionDocument6 pagesSujet 5 Mécanisme de Transmission CorrectionYahya AidaraPas encore d'évaluation
- TMM2 GIM Sujet 3 REDUCTEUR DE ROUE DROITE DE MOISSONNEUSEDocument5 pagesTMM2 GIM Sujet 3 REDUCTEUR DE ROUE DROITE DE MOISSONNEUSEThierry BoulayPas encore d'évaluation
- A 30 DDocument34 pagesA 30 DGégé di TPPas encore d'évaluation
- Boite de VitesseDocument8 pagesBoite de VitesseHamami AymenPas encore d'évaluation
- Schéma Technique Du Moteur Scooter Minarelli - ScootcustomDocument15 pagesSchéma Technique Du Moteur Scooter Minarelli - ScootcustomMar PopPas encore d'évaluation
- Pince Coupe-Cable: Par 5', 10', 11' Et 14'Document2 pagesPince Coupe-Cable: Par 5', 10', 11' Et 14'Zaafoury WassimPas encore d'évaluation
- TD4 Chaines de SolidesDocument5 pagesTD4 Chaines de SolidesfabisotresPas encore d'évaluation
- Le TrancannageDocument16 pagesLe Trancannagelouna yunaPas encore d'évaluation
- Theme 15 Scie SauteuseDocument5 pagesTheme 15 Scie SauteuseCasa Maestro100% (1)
- Ilovepdf - Merged (3) - RemovedDocument12 pagesIlovepdf - Merged (3) - RemovedRémiPas encore d'évaluation
- Définition D'engrenageDocument24 pagesDéfinition D'engrenageO'zSamaPas encore d'évaluation
- Examen - 1GM Iset Nabeul 2016Document6 pagesExamen - 1GM Iset Nabeul 2016Sabri WisPas encore d'évaluation
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- 3906 Ni 92252065Document41 pages3906 Ni 92252065Haithem WerheniPas encore d'évaluation
- BE Meca - FinalDocument28 pagesBE Meca - FinalKaoutar BouqdirPas encore d'évaluation
- Travaux DirigesDocument32 pagesTravaux Dirigestarik outalPas encore d'évaluation
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Devoir de Contrôle N°1 - Génie Mécanique - Unité de Taraudage - Bac Technique (Document7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Unité de Taraudage - Bac Technique (Black BleachPas encore d'évaluation
- Conception 2 CFM2 2020Document10 pagesConception 2 CFM2 2020Mohamed BerzoukPas encore d'évaluation
- Fonction Assemblage (Les Assemblages Démontables)Document24 pagesFonction Assemblage (Les Assemblages Démontables)MIMFS85% (20)
- Dossier Technique Truelle Bg39Document13 pagesDossier Technique Truelle Bg39michelPas encore d'évaluation
- App3 Rep STE STM SMB PDFDocument10 pagesApp3 Rep STE STM SMB PDFNSANGOUPas encore d'évaluation
- Les carnets de construction et vol du cerf-volant: envie de voler plus hautD'EverandLes carnets de construction et vol du cerf-volant: envie de voler plus hautÉvaluation : 5 sur 5 étoiles5/5 (1)
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013D'EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Déjouer les plans des bookmakers dans les quintés+ de trotD'EverandDéjouer les plans des bookmakers dans les quintés+ de trotPas encore d'évaluation