Vous aimerez peut-être aussi
- Eval 3 Guidage en Rotation TOURET A MEULERDocument5 pagesEval 3 Guidage en Rotation TOURET A MEULERGaston 91Pas encore d'évaluation
- 5 Freins 2Document64 pages5 Freins 2mehdiPas encore d'évaluation
- CNC Si Tsi GM 2016Document22 pagesCNC Si Tsi GM 2016Chaoub ZainabPas encore d'évaluation
- ASM Chap2 Encastrement V01 EtudiantsDocument18 pagesASM Chap2 Encastrement V01 Etudiantsachraf mhimdiPas encore d'évaluation
- Diapo Cours - RLT 16 17Document36 pagesDiapo Cours - RLT 16 17Section Maintenance LP-BlériotPas encore d'évaluation
- Assemblage Des PiècesDocument36 pagesAssemblage Des PiècesjabePas encore d'évaluation
- Pince DebrayableDocument4 pagesPince Debrayablefrederic sateraPas encore d'évaluation
- 16 DirectionDocument4 pages16 Directionaline leonardPas encore d'évaluation
- 20 - 20 - 2060 200503 20118 209 20 - 20 - 20 - 20D1 Ares 507-607PS RHB SYS EL HY FR TA03 TA05 PDFDocument54 pages20 - 20 - 2060 200503 20118 209 20 - 20 - 20 - 20D1 Ares 507-607PS RHB SYS EL HY FR TA03 TA05 PDFbillll43Pas encore d'évaluation
- Assemblage RoulementDocument10 pagesAssemblage RoulementElmehdi ElmessaoudiPas encore d'évaluation
- Palier Carter AutoporteeDocument4 pagesPalier Carter AutoporteeMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- cours du LTNOB F3CDocument10 pagescours du LTNOB F3Crodnain MourePas encore d'évaluation
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- Cours Dimensionnement Des RoulementsDocument10 pagesCours Dimensionnement Des RoulementsBadr EdouhabiPas encore d'évaluation
- Direction: CaractéristiquesDocument8 pagesDirection: CaractéristiquesBruno 9449Pas encore d'évaluation
- Liaison PivotDocument54 pagesLiaison PivotElgoHouda100% (1)
- Liaison PivotDocument6 pagesLiaison Pivotsaded05Pas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- AE GM Liaison - Pivot-Roul LightDocument32 pagesAE GM Liaison - Pivot-Roul LightSimoMonkadPas encore d'évaluation
- Cours LiaisonPivotDocument22 pagesCours LiaisonPivotemyazPas encore d'évaluation
- Lecture de Plans (2020)Document17 pagesLecture de Plans (2020)city gamesPas encore d'évaluation
- Rapport THSADocument59 pagesRapport THSAayoub fsaPas encore d'évaluation
- Guidage en Rotation TsDocument7 pagesGuidage en Rotation TscissePas encore d'évaluation
- Texte Activite Bts MVPDocument3 pagesTexte Activite Bts MVPMaghrebi YassinPas encore d'évaluation
- CI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesDocument4 pagesCI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesKhaled JberiPas encore d'évaluation
- TD 12 - Cin Matique Graphique - CIR Et Quiprojectivit PDFDocument8 pagesTD 12 - Cin Matique Graphique - CIR Et Quiprojectivit PDFIsmailPas encore d'évaluation
- 4.CHEMIN DE ROULEMENT Corrigé PDFDocument16 pages4.CHEMIN DE ROULEMENT Corrigé PDFIshak ReggazPas encore d'évaluation
- TD5 - Cine - 2017 VTT PDFDocument6 pagesTD5 - Cine - 2017 VTT PDFIsmailPas encore d'évaluation
- 9 - Les VérinsDocument78 pages9 - Les VérinsMohamed SalamPas encore d'évaluation
- GIM-Chapitre 1 - Fonction Guidage en Rotation 2eme PartieDocument28 pagesGIM-Chapitre 1 - Fonction Guidage en Rotation 2eme PartieDavid VHOUMBY100% (1)
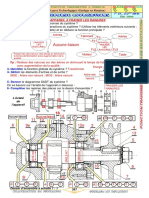
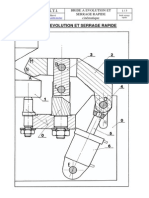
- Bride Serrage RapideDocument3 pagesBride Serrage RapideRedaAbdraouf0% (2)
- STI BE - Guidage en RotationDocument14 pagesSTI BE - Guidage en Rotationmeoh eezaPas encore d'évaluation
- TR de P CoursDocument16 pagesTR de P CoursomatrPas encore d'évaluation
- Présentation Sur Les RoulementsDocument27 pagesPrésentation Sur Les RoulementsManar BePas encore d'évaluation
- Roulements CoursDocument6 pagesRoulements CoursYous lbPas encore d'évaluation
- Synthèse Direction (Prof)Document15 pagesSynthèse Direction (Prof)Landing Sané100% (1)
- Montage de Roulements COURSDocument6 pagesMontage de Roulements COURSdjalikadjouPas encore d'évaluation
- Chapitre - 1 Guidage en Rotation PDFDocument23 pagesChapitre - 1 Guidage en Rotation PDFniniPas encore d'évaluation
- A 3 Suspension AvantDocument6 pagesA 3 Suspension AvantjuanlestonPas encore d'évaluation
- Cours 3Document9 pagesCours 3Amine RyderPas encore d'évaluation
- Isostatismes MIP MAPDocument6 pagesIsostatismes MIP MAPISMAILPas encore d'évaluation
- Montage de Roulements COURS Et TDDocument14 pagesMontage de Roulements COURS Et TDMes ZerPas encore d'évaluation
- Systemes MecaniquesDocument6 pagesSystemes MecaniquesCheikh Abdoul Hakim BABOUPas encore d'évaluation
- tp05 Roue Vis 1112Document4 pagestp05 Roue Vis 1112Serge SoursouPas encore d'évaluation
- ASSIF Notes Du Cours GuidageDocument18 pagesASSIF Notes Du Cours Guidageiraoui jamal (Ebay)Pas encore d'évaluation
- Cours TransmissionDocument8 pagesCours TransmissionNeoXana01100% (1)
- Rapport BureauDocument39 pagesRapport BureauAbdou AarabPas encore d'évaluation
- TD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFDocument49 pagesTD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFmukoPas encore d'évaluation
- BE Meca - FinalDocument28 pagesBE Meca - FinalKaoutar BouqdirPas encore d'évaluation
- GUIDAGE EN ROTATION ÉlèveDocument21 pagesGUIDAGE EN ROTATION ÉlèveKahri Youssef100% (1)
- Explication Différentiel AutomobileDocument6 pagesExplication Différentiel AutomobileAndriatsirihasinaPas encore d'évaluation
- 7 - Liaisons Mécaniques - Guidage en Translation - ÉléveDocument8 pages7 - Liaisons Mécaniques - Guidage en Translation - ÉléveZalfeni AymenPas encore d'évaluation
- Calcul Durée de Vie Des Roulements V2Document6 pagesCalcul Durée de Vie Des Roulements V2PLAKOST & CIEPas encore d'évaluation
- Pont Elevateur Colonne BTSDocument11 pagesPont Elevateur Colonne BTSsebti abassiPas encore d'évaluation
- Poly VDocument32 pagesPoly VJamel CharefPas encore d'évaluation
- Facicule Construction M4caniqueDocument101 pagesFacicule Construction M4caniqueJean CorreaPas encore d'évaluation
- 13-Liaison Pivot-Acti - p40-p48 - RepDocument11 pages13-Liaison Pivot-Acti - p40-p48 - RepESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- 07Document7 pages07api-3765963100% (2)
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Liste Des Pièces WDB9321821L488602Document2 pagesListe Des Pièces WDB9321821L488602Hadj Ahmed SaoudiPas encore d'évaluation
- Fiche Technique Simplifiée LA MAIZONETDocument5 pagesFiche Technique Simplifiée LA MAIZONETDéwidBenNirflötPas encore d'évaluation
- Examen de Fin de Formation TSMFM 2011 v1 Pratique CorrigeDocument9 pagesExamen de Fin de Formation TSMFM 2011 v1 Pratique CorrigeMouad ElansariPas encore d'évaluation
- TP1 Physique 2 2019-2020Document5 pagesTP1 Physique 2 2019-2020Marwan BouchelaghemPas encore d'évaluation
- Notice Telecommande Compatible SOMFY-SIMINORDocument1 pageNotice Telecommande Compatible SOMFY-SIMINORAlain LamouchePas encore d'évaluation
- Catalogue L Univers Boulonnerie Visserie ProliansDocument180 pagesCatalogue L Univers Boulonnerie Visserie ProliansLabriss LabrissPas encore d'évaluation
- Aiguiser La Lame de Son CouteauDocument5 pagesAiguiser La Lame de Son CouteauverdiergrPas encore d'évaluation
- Chapitre 2liaison CompleteDocument8 pagesChapitre 2liaison CompleteYouness El HamriPas encore d'évaluation
- CfaoDocument19 pagesCfaoimenePas encore d'évaluation
- Construction de Triangles (Chauve-Souris)Document7 pagesConstruction de Triangles (Chauve-Souris)Equipe de MathématiquesPas encore d'évaluation
- Exercice Tableaux Croisés DynamiquesDocument52 pagesExercice Tableaux Croisés Dynamiquesngock isom herve danielPas encore d'évaluation
- 4 Transmission 1Document60 pages4 Transmission 1mehdiPas encore d'évaluation
- 264 Winchester MagnumDocument10 pages264 Winchester MagnumCarlos AntonioPas encore d'évaluation
- Catalogue ChambriardDocument12 pagesCatalogue ChambriardPhilippe LamoussierePas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique Chaîne de Conditionnement de Medicaments - Bac Technique (2016-2017) MR Mlaouhi SlaheddineDocument11 pagesDevoir de Contrôle N°1 - Génie Mécanique Chaîne de Conditionnement de Medicaments - Bac Technique (2016-2017) MR Mlaouhi SlaheddineDhia Cherni100% (1)
- Fiche Technique PVC-U FORAGEDocument2 pagesFiche Technique PVC-U FORAGEKelanemer AboubakrPas encore d'évaluation
- Transmission Et Transformation de MouvementsDocument37 pagesTransmission Et Transformation de MouvementsKarim DorghamPas encore d'évaluation
- PLOMBERIEDocument4 pagesPLOMBERIEPapiPas encore d'évaluation
- A. Définition de L'idée de Projet: Fabrication de Boites À Vitesse AutomatiquesDocument2 pagesA. Définition de L'idée de Projet: Fabrication de Boites À Vitesse AutomatiqueshichemPas encore d'évaluation
- Tte 03 Ce 1Document4 pagesTte 03 Ce 1Djerbien Slouma100% (1)
- Utilisation CMT300Document11 pagesUtilisation CMT300DEPas encore d'évaluation
- OKH-CKC 007 E08620 13 To 09 12 08Document20 pagesOKH-CKC 007 E08620 13 To 09 12 08DIMAKATSOVIC_2827026Pas encore d'évaluation
- Programme D'entretien Preventif TEREXDocument12 pagesProgramme D'entretien Preventif TEREXMourad Wanen100% (1)
- Glossaire Industriel Anglais FrançaisDocument4 pagesGlossaire Industriel Anglais Françaissebastien ghiciniPas encore d'évaluation
- Continental Edison CELVW1249A DishwasherDocument13 pagesContinental Edison CELVW1249A DishwasherAdi AntonescuPas encore d'évaluation
- Cinematique Transmission de PuissanceDocument22 pagesCinematique Transmission de Puissancepierre blanchinPas encore d'évaluation
- Notice de Montage Equipement de Motorisation Servo Moteur de ...Document12 pagesNotice de Montage Equipement de Motorisation Servo Moteur de ...Cédric RONJONPas encore d'évaluation
- CaractéristiquesDocument46 pagesCaractéristiquesMahaman kabirouPas encore d'évaluation
- PBE - EPU 04 - Equipment Enginering - ParticipantsDocument25 pagesPBE - EPU 04 - Equipment Enginering - ParticipantsHamidPas encore d'évaluation