Vous aimerez peut-être aussi
- Les Exercices de La Methode SilvaDocument11 pagesLes Exercices de La Methode Silvaعرفان باهر100% (8)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TD MecaniqueDocument13 pagesTD MecaniqueSovann_Long80% (5)
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaPas encore d'évaluation
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- CI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument8 pagesCI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- CI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument4 pagesCI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- Bibliographie Stress Au Travail 2017-10-27Document15 pagesBibliographie Stress Au Travail 2017-10-27mael bikoroPas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- TD 22 - Comportement Statique Des SystèmesDocument6 pagesTD 22 - Comportement Statique Des Systèmesbhs channelPas encore d'évaluation
- Etude Des Mecanismes de Levage Et de Direction D'Un Pont RoulantDocument59 pagesEtude Des Mecanismes de Levage Et de Direction D'Un Pont Roulantamzal boudjmaamoundherPas encore d'évaluation
- Revisions MecaniquesDocument6 pagesRevisions MecaniquesAbdelali YacoubiPas encore d'évaluation
- COURSDocument4 pagesCOURSYoussef YouriPas encore d'évaluation
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- SwingDocument33 pagesSwingKarim KarimPas encore d'évaluation
- CI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIDocument19 pagesCI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIKhaled JberiPas encore d'évaluation
- TD 24 - Comportement Statique Des SystèmesDocument8 pagesTD 24 - Comportement Statique Des Systèmesbhs channel50% (2)
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- TD 13 - Comportement Cinématique Des SystèmesDocument9 pagesTD 13 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Exercices de Statique TSI 1Document31 pagesExercices de Statique TSI 1Mamoun DrissiPas encore d'évaluation
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument8 pagesCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiPas encore d'évaluation
- Meca TD Sujets 12 13 v01Document20 pagesMeca TD Sujets 12 13 v01Nadia DridiPas encore d'évaluation
- TD 29 - Arc-BoutementDocument7 pagesTD 29 - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- DS6 SujetDocument8 pagesDS6 SujetPierre BeckPas encore d'évaluation
- AE GM Liaison - Pivot-Roul LightDocument32 pagesAE GM Liaison - Pivot-Roul LightSimoMonkadPas encore d'évaluation
- CNC Si Tsi GM 2016Document22 pagesCNC Si Tsi GM 2016Chaoub ZainabPas encore d'évaluation
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Sciences Industrielles Pour L'Ingénieur I: PrésentationDocument24 pagesSciences Industrielles Pour L'Ingénieur I: PrésentationKiki RotoPas encore d'évaluation
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- TD5 - Cine - 2017 VTT PDFDocument6 pagesTD5 - Cine - 2017 VTT PDFIsmailPas encore d'évaluation
- TD2 PFS Hypers 16 17Document4 pagesTD2 PFS Hypers 16 17C&N BeatsPas encore d'évaluation
- TD Helico AscenseurDocument8 pagesTD Helico AscenseurWakule Christian MurhabaziPas encore d'évaluation
- Td3 StatiqueDocument10 pagesTd3 StatiqueYaye Anta DiopPas encore d'évaluation
- TD1 Complet2Document4 pagesTD1 Complet2Tafotchin KonePas encore d'évaluation
- TD Guidage en Translation 20-21Document6 pagesTD Guidage en Translation 20-21meryPas encore d'évaluation
- TPstatiquePilote 2006Document6 pagesTPstatiquePilote 2006dfffePas encore d'évaluation
- TD 28 - PFS Résolution GraphiqueDocument8 pagesTD 28 - PFS Résolution GraphiqueMohamed AbaakilPas encore d'évaluation
- Exo I1 1 Si2Document16 pagesExo I1 1 Si2Lamine SarrPas encore d'évaluation
- ENGEES00ScIngPSI-e 2000Document10 pagesENGEES00ScIngPSI-e 2000taruffiPas encore d'évaluation
- Exercice 4 Banc Pneumatique A1Document2 pagesExercice 4 Banc Pneumatique A1Mohamed Amine FaidiPas encore d'évaluation
- CCP Sii MP 2007 EpreuveDocument18 pagesCCP Sii MP 2007 Epreuvehamza hamzaPas encore d'évaluation
- DYN-ENER07 Sujet - Equilibrer Un Solide en Rotation Autour D'un Axe FixeDocument10 pagesDYN-ENER07 Sujet - Equilibrer Un Solide en Rotation Autour D'un Axe FixeseddikmorabetPas encore d'évaluation
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- (Dyn) (TD) Nacelle A Fleche Telescopique H21Document4 pages(Dyn) (TD) Nacelle A Fleche Telescopique H21Salah DarkPas encore d'évaluation
- 2-Dossier Travail DemandDocument11 pages2-Dossier Travail Demandjuliette ravinetPas encore d'évaluation
- Exos CinématiqueDocument40 pagesExos Cinématiquehamzasaad615Pas encore d'évaluation
- CI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesCI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueKhaled JberiPas encore d'évaluation
- Feuille n1 MecanismesDocument4 pagesFeuille n1 MecanismesntabPas encore d'évaluation
- La Suspension Anti-Plongée de La Motocyclette BMW K1200SDocument9 pagesLa Suspension Anti-Plongée de La Motocyclette BMW K1200SKhaled AlouiniPas encore d'évaluation
- TP Croix de Malte INDEXADocument9 pagesTP Croix de Malte INDEXASidi RachPas encore d'évaluation
- DS1 MP - 13 - 11 - 21 (Sujet)Document7 pagesDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDIPas encore d'évaluation
- 130 Engrenages PreparationDocument9 pages130 Engrenages PreparationIkram MisbahPas encore d'évaluation
- TD0423T52Document8 pagesTD0423T52rachid.ait.bouale01Pas encore d'évaluation
- Ilovepdf - Merged (3) - RemovedDocument12 pagesIlovepdf - Merged (3) - RemovedRémiPas encore d'évaluation
- Verins Maintien COURS CORRIGEDocument7 pagesVerins Maintien COURS CORRIGEDog RayzPas encore d'évaluation
- DM1Document5 pagesDM1bhsbhs19Pas encore d'évaluation
- Flexion (Elevateur de Voitures)Document3 pagesFlexion (Elevateur de Voitures)SERGIOPas encore d'évaluation
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- TD1 PFS 17 18Document4 pagesTD1 PFS 17 18Yassine Bouchatta50% (2)
- TD EmbDocument5 pagesTD EmbFARES Naoufel100% (1)
- CI STAT Suj MotoDocument5 pagesCI STAT Suj MotoMohamed Khaled GdouraPas encore d'évaluation
- Cours TE 1 Schematisation Cinematique CorrectionDocument8 pagesCours TE 1 Schematisation Cinematique Correctionhanane hamidiPas encore d'évaluation
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- Cinématique Des Solides - TD2 EnoncéDocument3 pagesCinématique Des Solides - TD2 EnoncéImad HakkachePas encore d'évaluation
- 2 Chapitre 2Document73 pages2 Chapitre 2mohamed benabbouPas encore d'évaluation
- 03.2 - Cinématique Du Point - TD2Document4 pages03.2 - Cinématique Du Point - TD2Khaled JberiPas encore d'évaluation
- CCP SupDocument22 pagesCCP SupKhaled JberiPas encore d'évaluation
- Klubprepa Extrait 4760Document4 pagesKlubprepa Extrait 4760Mimita Lafleur100% (1)
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- coursMP2I AlgebreDocument118 pagescoursMP2I AlgebreKhaled JberiPas encore d'évaluation
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument4 pagesCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- CI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument7 pagesCI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreDocument12 pagesCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- CI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesDocument11 pagesCI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesKhaled JberiPas encore d'évaluation
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
- CI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesCI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueKhaled JberiPas encore d'évaluation
- CI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionDocument5 pagesCI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionKhaled JberiPas encore d'évaluation
- CI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeDocument8 pagesCI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
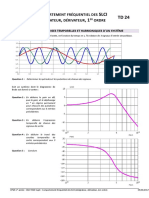
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI02 TD05 Corrigé - Imposer Une VitesseDocument6 pagesCI02 TD05 Corrigé - Imposer Une VitesseKhaled JberiPas encore d'évaluation
- CI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document7 pagesCI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeDocument2 pagesCI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument5 pagesCI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument3 pagesCI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI02 Cours - Déterminer Les Lois de Commande en Mouvement D - Un Mécanisme - Cas Des Chaînes OuvertesDocument15 pagesCI02 Cours - Déterminer Les Lois de Commande en Mouvement D - Un Mécanisme - Cas Des Chaînes OuvertesKhaled JberiPas encore d'évaluation
- CI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueDocument6 pagesCI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument2 pagesCI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- Epreuve E41 Bts Elec 2019 SujetDocument21 pagesEpreuve E41 Bts Elec 2019 Sujetoussama houariPas encore d'évaluation
- RazafindrakotoJacquelin ESPA MAST 2017Document217 pagesRazafindrakotoJacquelin ESPA MAST 2017ABINAPas encore d'évaluation
- Présentation Leader 2Document14 pagesPrésentation Leader 2Rosine PergamentPas encore d'évaluation
- Une Biodiversité MenacéeDocument1 pageUne Biodiversité Menacéeniu sauPas encore d'évaluation
- T 7h2uw 2022 1Document1 pageT 7h2uw 2022 1MamPas encore d'évaluation
- Les Mille Visages de L IndianOceanieDocument110 pagesLes Mille Visages de L IndianOceanieAli Abbas100% (1)
- Achar2Bases de Calcul de lEC3Document19 pagesAchar2Bases de Calcul de lEC3Omar OmarPas encore d'évaluation
- F Bakini, M Touzani, S JerbiDocument26 pagesF Bakini, M Touzani, S JerbiMălina-Ionela CorlătianuPas encore d'évaluation
- Echafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentDocument47 pagesEchafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentZirig ChafikPas encore d'évaluation
- التمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفDocument11 pagesالتمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفhoulahilaPas encore d'évaluation
- Personal SkillsDocument11 pagesPersonal SkillsAgathe GrenonPas encore d'évaluation
- DT2022-18 Document Travail Grille de DensiteDocument26 pagesDT2022-18 Document Travail Grille de Densitefrederic amadonPas encore d'évaluation
- Achouri Amira NouhaDocument135 pagesAchouri Amira NouhaEmmanuel AvegnonPas encore d'évaluation
- Antennes - Techniques PDFDocument47 pagesAntennes - Techniques PDFMANERERPas encore d'évaluation
- Digital Signal ProcessorDocument69 pagesDigital Signal ProcessorFaresPas encore d'évaluation
- Spe645 Annexe2 22-1 1063862Document20 pagesSpe645 Annexe2 22-1 1063862tpolenorPas encore d'évaluation
- Achat Et AaproDocument33 pagesAchat Et AaproOualid BelbrikPas encore d'évaluation
- RespirationDocument19 pagesRespirationarselbleez441Pas encore d'évaluation
- Rapport de Stage Complete Sur La Gestion Des Opérations de CréditDocument44 pagesRapport de Stage Complete Sur La Gestion Des Opérations de Créditrogerkom.profsPas encore d'évaluation
- La Mise en Forme PFE-1Document3 pagesLa Mise en Forme PFE-1pfePas encore d'évaluation
- Processeur M MoireDocument66 pagesProcesseur M Moiresayedyoussef390Pas encore d'évaluation
- Gestion Budgétaire: Contrôle BudgetaireDocument25 pagesGestion Budgétaire: Contrôle BudgetaireKhansaa HaroudPas encore d'évaluation
- 1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFDocument18 pages1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFGuyMoquette100% (1)
- Samuel Blaser, Marc Ducret - JazzdorDocument2 pagesSamuel Blaser, Marc Ducret - JazzdorolocesPas encore d'évaluation
- Le Labfab de Rennes 2012-2013: DiaporamaDocument14 pagesLe Labfab de Rennes 2012-2013: DiaporamalabfabfrPas encore d'évaluation
- Chapitre07.eurocode 8 PDFDocument11 pagesChapitre07.eurocode 8 PDFMohamed HaykelPas encore d'évaluation