Vous aimerez peut-être aussi
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Mecanique RationnelleDocument159 pagesMecanique RationnelleAnonymous cIN9ClVW100% (2)
- CI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesDocument11 pagesCI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesKhaled JberiPas encore d'évaluation
- Manuel de Reference 4st Version1Document222 pagesManuel de Reference 4st Version1Zied MakkiPas encore d'évaluation
- DYN Cours - Dynamique Et Énergétique Des Systèmes de Solides Indéformables - CorrigéDocument22 pagesDYN Cours - Dynamique Et Énergétique Des Systèmes de Solides Indéformables - CorrigéCandy Soundouss100% (1)
- Polycope Cours Mecanique Du Point LAMSAADIDocument59 pagesPolycope Cours Mecanique Du Point LAMSAADIMohamed Driouch100% (2)
- Benhalima Nadia - Cours de Physique1-2019-2020Document105 pagesBenhalima Nadia - Cours de Physique1-2019-2020benhalima nadiaPas encore d'évaluation
- CinématiqueDocument14 pagesCinématiqueAbdelkoddousPas encore d'évaluation
- CI03 Cours - Prévoir Et Identifier Le Comportement Temporel D'un SLCIDocument15 pagesCI03 Cours - Prévoir Et Identifier Le Comportement Temporel D'un SLCIأبو كعب علاء الدينPas encore d'évaluation
- Cours de Robotique-V3-18-12-2018Document51 pagesCours de Robotique-V3-18-12-2018Omar 95Pas encore d'évaluation
- Polycopié MRDocument88 pagesPolycopié MRderradji nabilPas encore d'évaluation
- Coursanalyseetcalculdesstructures R.admaNDocument101 pagesCoursanalyseetcalculdesstructures R.admaNKhalid el hartiPas encore d'évaluation
- Poly-Copié Phisique-1 - SALEMDocument112 pagesPoly-Copié Phisique-1 - SALEMameri ibrahimPas encore d'évaluation
- MecaniquDocument7 pagesMecaniquSylia BoukhiarPas encore d'évaluation
- Cours Installations Industrielles en PDF ParDocument43 pagesCours Installations Industrielles en PDF ParAnonymous x02Fa9xxpV100% (3)
- TCM Cours GIM 1 ZINE PDFDocument64 pagesTCM Cours GIM 1 ZINE PDFAbdelmajid AittalebPas encore d'évaluation
- Polycopie coursTTSDocument113 pagesPolycopie coursTTSFakhreddine OkailPas encore d'évaluation
- Polycope Physique S1 2018fin PDFDocument59 pagesPolycope Physique S1 2018fin PDFderghal100% (1)
- B+®ton Arm+® Guide de CalculDocument135 pagesB+®ton Arm+® Guide de CalculThillo SOWPas encore d'évaluation
- Université Du Québec: Nouvelle Méthode de Génération Des Trajectoires Pour La Commande de Bras de RobotsDocument150 pagesUniversité Du Québec: Nouvelle Méthode de Génération Des Trajectoires Pour La Commande de Bras de RobotsHamdi AlouiPas encore d'évaluation
- TournageDocument13 pagesTournageChokri AtefPas encore d'évaluation
- Reg Auto Hachana OussamaDocument130 pagesReg Auto Hachana Oussamaamadou tallPas encore d'évaluation
- Plan Cours 5Document3 pagesPlan Cours 5fangatauPas encore d'évaluation
- Capture D'écran . 2023-05-18 À 22.03.45Document73 pagesCapture D'écran . 2023-05-18 À 22.03.45Yassine AboussalahPas encore d'évaluation
- SOMMAIREDocument5 pagesSOMMAIRERabah AmidiPas encore d'évaluation
- Polycopié - Djamel OUZANDJA - Résistance Des Matériauxs PDFDocument104 pagesPolycopié - Djamel OUZANDJA - Résistance Des Matériauxs PDFNatalie VormanPas encore d'évaluation
- Dynamique Et VibrationsDocument59 pagesDynamique Et VibrationsZeina GhandourPas encore d'évaluation
- Feuilletage 675Document17 pagesFeuilletage 675Ahmed ZrPas encore d'évaluation
- Meca PDFDocument44 pagesMeca PDFHenri-joel Diabagate100% (1)
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- 421 PC Freinage Des Trains VFRDocument26 pages421 PC Freinage Des Trains VFRThelesphore DJATCHEJIE SIMOPas encore d'évaluation
- Cbades5ltps5gc HTDocument74 pagesCbades5ltps5gc HTBelaid AbdennourPas encore d'évaluation
- Chap06 OA 2023Document15 pagesChap06 OA 2023dawoud.kenzariPas encore d'évaluation
- Cours PDFDocument44 pagesCours PDFChaouki Abdallah100% (1)
- Ingénierie Mécanique - Transmission de Puissance - Tome 2Document287 pagesIngénierie Mécanique - Transmission de Puissance - Tome 2Jacques BONOU100% (1)
- 00-Cours Comple 2STE - 2023-2024 - p1-p140Document142 pages00-Cours Comple 2STE - 2023-2024 - p1-p140housinmechani1Pas encore d'évaluation
- Cours MSDocument70 pagesCours MSRedouane RedaPas encore d'évaluation
- Dessin Tech TF1Document12 pagesDessin Tech TF1Yannick devario YOUSSI BANGPas encore d'évaluation
- Analyse de L'Ecoulement Dans La Roue D'Une Turbine Hydraulique Axiale de Type Hélice Prise en Considération Du Jeu de Bout D'aubeDocument107 pagesAnalyse de L'Ecoulement Dans La Roue D'Une Turbine Hydraulique Axiale de Type Hélice Prise en Considération Du Jeu de Bout D'aubeHajar MaqrotePas encore d'évaluation
- Decument de Traction Ahmed1Document15 pagesDecument de Traction Ahmed1Ahmed AhmedPas encore d'évaluation
- 2006evry0039 PDFDocument119 pages2006evry0039 PDFKhalil HsainePas encore d'évaluation
- Commande Vectorielle Des Onduleurs Multi NivauxDocument109 pagesCommande Vectorielle Des Onduleurs Multi NivauxFrancis Logamou AdoumPas encore d'évaluation
- CIN Cours - Cinématique Du Solide Indéformable - CorrigéDocument33 pagesCIN Cours - Cinématique Du Solide Indéformable - CorrigéAlam Castillo Herrera100% (1)
- Automatismes Industriels CoursDocument45 pagesAutomatismes Industriels CoursOchi ChaimaPas encore d'évaluation
- Essais de Traction Sur L'acierDocument21 pagesEssais de Traction Sur L'acierAbir BenyahiaPas encore d'évaluation
- F08Document6 pagesF08hemsasPas encore d'évaluation
- La Commande Pleine Onde Des Onduleurs (Association Avec Une Machine Asynchrone)Document35 pagesLa Commande Pleine Onde Des Onduleurs (Association Avec Une Machine Asynchrone)Benkhada Hamane86% (22)
- ESME Programme An3 GE Automatique PDFDocument14 pagesESME Programme An3 GE Automatique PDFWalid GhrairiPas encore d'évaluation
- Recc81sumecc81 de La Mecanique Du PointDocument28 pagesRecc81sumecc81 de La Mecanique Du PointTeyeb CharafPas encore d'évaluation
- Application Aux Fondations SuperfificielleDocument116 pagesApplication Aux Fondations SuperfificielleToufikPas encore d'évaluation
- DimensionnementStructures LegayDocument87 pagesDimensionnementStructures LegayYao SanianPas encore d'évaluation
- PB1400-FR Notice D Utilisation Pour Les Orthopédistes Ou Les Experts Qualifiés Formés NEURO SWING H2ODocument18 pagesPB1400-FR Notice D Utilisation Pour Les Orthopédistes Ou Les Experts Qualifiés Formés NEURO SWING H2OaminePas encore d'évaluation
- TD ReducteursDocument6 pagesTD ReducteursOumaima Ghziale100% (1)
- COURS DE MECANIQUE APPLIQUEE SERIE F4 &ere Partie-1Document140 pagesCOURS DE MECANIQUE APPLIQUEE SERIE F4 &ere Partie-1Assane Niangao100% (1)
- CIN Cours - Cinématique Du Solide Indéformable - CorrigéDocument33 pagesCIN Cours - Cinématique Du Solide Indéformable - CorrigéAhmed AammiPas encore d'évaluation
- Automatismes Industriels 2 Eme Annee Gen PDFDocument47 pagesAutomatismes Industriels 2 Eme Annee Gen PDFAmmar BahijPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- Cinématique Des Solides - TD2 EnoncéDocument3 pagesCinématique Des Solides - TD2 EnoncéImad HakkachePas encore d'évaluation
- 2 Chapitre 2Document73 pages2 Chapitre 2mohamed benabbouPas encore d'évaluation
- CI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument4 pagesCI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument8 pagesCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiPas encore d'évaluation
- CI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument8 pagesCI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- 03.2 - Cinématique Du Point - TD2Document4 pages03.2 - Cinématique Du Point - TD2Khaled JberiPas encore d'évaluation
- ccp-supDocument22 pagesccp-supKhaled JberiPas encore d'évaluation
- Klubprepa Extrait 4760Document4 pagesKlubprepa Extrait 4760Mimita Lafleur100% (1)
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- coursMP2I AlgebreDocument118 pagescoursMP2I AlgebreKhaled JberiPas encore d'évaluation
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument4 pagesCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- CI02 TD05 Corrigé - Imposer Une VitesseDocument6 pagesCI02 TD05 Corrigé - Imposer Une VitesseKhaled JberiPas encore d'évaluation
- CI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument7 pagesCI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreDocument12 pagesCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
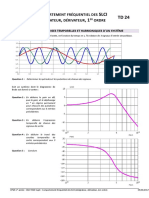
- CI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document7 pagesCI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesCI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeDocument8 pagesCI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIDocument19 pagesCI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIKhaled JberiPas encore d'évaluation
- CI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesDocument4 pagesCI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesKhaled JberiPas encore d'évaluation
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionDocument5 pagesCI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionKhaled JberiPas encore d'évaluation
- CI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeDocument2 pagesCI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument5 pagesCI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument3 pagesCI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueDocument6 pagesCI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument2 pagesCI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- UN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannDocument9 pagesUN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannClaudia RamassoPas encore d'évaluation
- Practice+exam+chap+3 - 1 - 1Document7 pagesPractice+exam+chap+3 - 1 - 1Box OfficePas encore d'évaluation
- T.D. N°2 - Les AmortissementsDocument3 pagesT.D. N°2 - Les Amortissementsangelinaa.bento05Pas encore d'évaluation
- Katalogs-19-Fusibles A Couteaux NHDocument8 pagesKatalogs-19-Fusibles A Couteaux NHhakimPas encore d'évaluation
- Guide Satellite Clubs FRDocument4 pagesGuide Satellite Clubs FRsoufiane mrabetPas encore d'évaluation
- UM Operation Manual FRFR 27021611646554123Document299 pagesUM Operation Manual FRFR 27021611646554123Georges TaradauxPas encore d'évaluation
- Premier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsDocument4 pagesPremier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsHouda ChanPas encore d'évaluation
- Cour 1 - VirtualisationDocument24 pagesCour 1 - Virtualisationjeremie zehouPas encore d'évaluation
- Gagner de L'argent Avec YoutubeDocument7 pagesGagner de L'argent Avec Youtubeanon_811149744Pas encore d'évaluation
- Déformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueDocument11 pagesDéformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueFarahBoughanmiPas encore d'évaluation
- 3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieDocument14 pages3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieM.B. IsmailPas encore d'évaluation
- Guide de Logiciel Sap20000 CopierDocument54 pagesGuide de Logiciel Sap20000 CopierAbdou HababaPas encore d'évaluation
- Aid Memoire XP 18-545Document2 pagesAid Memoire XP 18-545Lotfi Merabet75% (4)
- Document 1249Document11 pagesDocument 1249MrYodaaPas encore d'évaluation
- François Brune - La Vierge Du MexiqueDocument681 pagesFrançois Brune - La Vierge Du MexiquethanosPas encore d'évaluation
- Question Et Réponse 4Document15 pagesQuestion Et Réponse 4saraPas encore d'évaluation
- Boc 20221230Document23 pagesBoc 20221230electronicsobed the son of GODPas encore d'évaluation
- Entretien Du Reseau D'Eclairage Public Au Sein de La CommuneDocument24 pagesEntretien Du Reseau D'Eclairage Public Au Sein de La CommuneMProd AmmoPas encore d'évaluation
- Audit Cycle VenteDocument38 pagesAudit Cycle VenteaminePas encore d'évaluation
- UltrafiltrationDocument10 pagesUltrafiltrationsoufyanePas encore d'évaluation
- Fin OofDocument24 pagesFin OofAhmed Ouss0% (1)
- Guide Investir Dans Les PME en AfriqueDocument74 pagesGuide Investir Dans Les PME en AfriquePDG EYAFPas encore d'évaluation
- D61PXi MoniteurDocument38 pagesD61PXi MoniteurXavier FontainePas encore d'évaluation
- L1 - GPL - Cours Numéro 01 La QualitéDocument13 pagesL1 - GPL - Cours Numéro 01 La Qualitéformation distancePas encore d'évaluation
- Tome 2 Impacts EnvironnementauxDocument49 pagesTome 2 Impacts EnvironnementauxUlrich Ralph NjoyaPas encore d'évaluation
- SigmaDocument2 pagesSigmaAli KPas encore d'évaluation
- Mouteur DCDocument7 pagesMouteur DCElmokh LassaadPas encore d'évaluation
- RégimeDocument12 pagesRégimeernestito2010Pas encore d'évaluation
- InstallationDocument9 pagesInstallationfatihaPas encore d'évaluation
- These ND PAreconf VF PDFDocument174 pagesThese ND PAreconf VF PDFRachid HamianiPas encore d'évaluation