Vous aimerez peut-être aussi
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- TD 29 - Arc-BoutementDocument7 pagesTD 29 - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
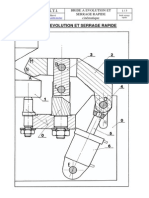
- Bride Serrage RapideDocument3 pagesBride Serrage RapideRedaAbdraouf0% (2)
- Cours Transmission de Mouvements Et1Document17 pagesCours Transmission de Mouvements Et1zouhour brahmiPas encore d'évaluation
- 8 - Trains D'engrenagesDocument20 pages8 - Trains D'engrenageseslochPas encore d'évaluation
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- DT - PalettiseurDocument5 pagesDT - PalettiseurMaghrebi YassinPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
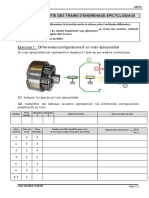
- CIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFDocument6 pagesCIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFBouslama NPas encore d'évaluation
- MR366X841Document230 pagesMR366X841Zatovonirina Razafindrainibe100% (4)
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- CI06 TD22 Corrigé - Déterminer La Loi Entrée-Sortie D'un Train ÉpicycloïdalDocument4 pagesCI06 TD22 Corrigé - Déterminer La Loi Entrée-Sortie D'un Train ÉpicycloïdalYounes KaderPas encore d'évaluation
- Les Embrayages OtmanDocument25 pagesLes Embrayages OtmanOtman StariPas encore d'évaluation
- EngrenageDocument33 pagesEngrenagechaouch.najehPas encore d'évaluation
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFSofiane Redjradj100% (1)
- 2210192Document8 pages2210192Sofiene GuedriPas encore d'évaluation
- Boite Vitesse Mini Projet (Imad)Document16 pagesBoite Vitesse Mini Projet (Imad)Houari Haouche60% (5)
- Chapitre4 PDFDocument44 pagesChapitre4 PDFAmina NouriPas encore d'évaluation
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaPas encore d'évaluation
- N° 775 Toyota Yaris 1.0 Février 2001Document25 pagesN° 775 Toyota Yaris 1.0 Février 2001PhiloMen50% (2)
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- DP - Palettiseur - Corrigé - CouleurDocument4 pagesDP - Palettiseur - Corrigé - CouleurMaghrebi Yassin100% (1)
- Transmission de PuissanceDocument5 pagesTransmission de Puissancenabil loutfi100% (4)
- PIECE CARTE VERTE Du 26 02 2024 12 07 2Document1 pagePIECE CARTE VERTE Du 26 02 2024 12 07 2ahmed.rabbitoulonPas encore d'évaluation
- Hyster Hx16xm-6 FRDocument188 pagesHyster Hx16xm-6 FRHedi OuniPas encore d'évaluation
- Boîte de Vitesses Mécanique: CaractéristiquesDocument19 pagesBoîte de Vitesses Mécanique: Caractéristiquesnasro nasro100% (1)
- tp02 CardanDocument6 pagestp02 CardanSerge SoursouPas encore d'évaluation
- Train EpicycloidalDocument12 pagesTrain EpicycloidalNaima LaaroussiPas encore d'évaluation
- Réducteurs Et Multiplicateurs de VitesseDocument4 pagesRéducteurs Et Multiplicateurs de VitesseahmedguerinPas encore d'évaluation
- TD+ EngrenagesDocument2 pagesTD+ EngrenagesLahoucine AgmaratPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- tp05 Roue Vis 1112Document4 pagestp05 Roue Vis 1112Serge SoursouPas encore d'évaluation
- Explication Différentiel AutomobileDocument6 pagesExplication Différentiel AutomobileAndriatsirihasinaPas encore d'évaluation
- Cours TransmetteursDocument20 pagesCours TransmetteursSimplice AssemienPas encore d'évaluation
- Verins Maintien COURS CORRIGEDocument7 pagesVerins Maintien COURS CORRIGEDog RayzPas encore d'évaluation
- 01TD1 3Document5 pages01TD1 3ttchhf40Pas encore d'évaluation
- Chap 3 Loi Entree SortieDocument6 pagesChap 3 Loi Entree SortieSekhena SankharePas encore d'évaluation
- TD20 - Train Epicycloidal - Sujet PDFDocument5 pagesTD20 - Train Epicycloidal - Sujet PDFTafotchin Kone100% (1)
- 3 - Les Trains EpicycloidauxDocument23 pages3 - Les Trains Epicycloidauxfrederic sateraPas encore d'évaluation
- Roues Et Chaine 2015Document3 pagesRoues Et Chaine 2015barryhamadounallaye1100% (1)
- Exo I1 1 Si2Document16 pagesExo I1 1 Si2Lamine SarrPas encore d'évaluation
- CInématique TD7&8 LiaisonsEquivalentesDocument3 pagesCInématique TD7&8 LiaisonsEquivalenteshsn frkPas encore d'évaluation
- Cours - Transmission - de - Mouvements-2 (Recovered 1) PDFDocument14 pagesCours - Transmission - de - Mouvements-2 (Recovered 1) PDFAbdelmajid AittalebPas encore d'évaluation
- 4 - Transmission de PuissanceDocument12 pages4 - Transmission de Puissancehubertholloway723Pas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours Engrenagestopjob100% (4)
- TR de P CoursDocument16 pagesTR de P CoursomatrPas encore d'évaluation
- 4 TpboitedevitessespfsDocument10 pages4 TpboitedevitessespfsrabbajPas encore d'évaluation
- TD19 1Document5 pagesTD19 1WafaPas encore d'évaluation
- Train ÉpicycloïdalDocument7 pagesTrain ÉpicycloïdalTEBAO PRINCEPas encore d'évaluation
- Boite de Vitesse 2015Document6 pagesBoite de Vitesse 2015KOUMBA KOUMBA RUFINPas encore d'évaluation
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Cours EngrenagesDocument12 pagesCours EngrenagesOussama BkPas encore d'évaluation
- CI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesDocument4 pagesCI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesKhaled JberiPas encore d'évaluation
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- Chap 1 EngrenagesDocument8 pagesChap 1 EngrenagesMouhamed Rassoul GueyePas encore d'évaluation
- Pince DebrayableDocument4 pagesPince Debrayablefrederic sateraPas encore d'évaluation
- ENGEES00ScIngPSI-e 2000Document10 pagesENGEES00ScIngPSI-e 2000taruffiPas encore d'évaluation
- 14-Liaison Pivot - EXDocument8 pages14-Liaison Pivot - EXN'GOLO MAMADOU KONEPas encore d'évaluation
- Sec CCP 2004 Si PSIDocument30 pagesSec CCP 2004 Si PSImabdallah_688628Pas encore d'évaluation
- Systemes MecaniquesDocument6 pagesSystemes MecaniquesCheikh Abdoul Hakim BABOUPas encore d'évaluation
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2NeoXana01Pas encore d'évaluation
- Champ de mouvement: Explorer la dynamique de la vision par ordinateur : le champ de mouvement dévoiléD'EverandChamp de mouvement: Explorer la dynamique de la vision par ordinateur : le champ de mouvement dévoiléPas encore d'évaluation
- Moments de vitesse: Capturer la dynamique : aperçu de la vision par ordinateurD'EverandMoments de vitesse: Capturer la dynamique : aperçu de la vision par ordinateurPas encore d'évaluation
- Volume englobant: Explorer la représentation spatiale en vision par ordinateurD'EverandVolume englobant: Explorer la représentation spatiale en vision par ordinateurPas encore d'évaluation
- Génération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurD'EverandGénération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurPas encore d'évaluation
- 21 9 TD Train Epi v9Document15 pages21 9 TD Train Epi v9Maghrebi YassinPas encore d'évaluation
- TD7 1Document3 pagesTD7 1Maghrebi YassinPas encore d'évaluation
- 2 CorrigéDocument8 pages2 CorrigéMaghrebi YassinPas encore d'évaluation
- Liste Des Produits Agrees ONEDocument47 pagesListe Des Produits Agrees ONEHassan MorabihPas encore d'évaluation
- Moteur Eclate Annexe 3Document1 pageMoteur Eclate Annexe 3almasraf changePas encore d'évaluation
- TELECOM Transmission Accessories (OPGW-ADSS) - 2011 - 02 - 14Document28 pagesTELECOM Transmission Accessories (OPGW-ADSS) - 2011 - 02 - 14Amílcar Duarte100% (1)
- LavaboDocument127 pagesLavaboESAIE BadoloPas encore d'évaluation
- 3 en 1 Servomoteur de Vanne Et RégulateurDocument12 pages3 en 1 Servomoteur de Vanne Et Régulateurhito gamePas encore d'évaluation
- TDDocument5 pagesTDredPas encore d'évaluation
- Bordereau Des Prix Video DistrictsDocument2 pagesBordereau Des Prix Video Districtssecurity centerPas encore d'évaluation
- Elneo RecuperationChaleurDocument17 pagesElneo RecuperationChaleurFatma KrissanePas encore d'évaluation
- Cour Automatisme IndustrielDocument96 pagesCour Automatisme Industrielkima lachgarPas encore d'évaluation
- Réaliser Par:: Mini-Projet 1Document32 pagesRéaliser Par:: Mini-Projet 1Chahla EssounniPas encore d'évaluation
- Noforedg16 PDFDocument432 pagesNoforedg16 PDFMohamed CamaraPas encore d'évaluation
- Détermination Des Paramètres Influents Le Choix Du Moteur Électrique. Détermination Des Points de Fonctionnement de Ce Moteur PDFDocument55 pagesDétermination Des Paramètres Influents Le Choix Du Moteur Électrique. Détermination Des Points de Fonctionnement de Ce Moteur PDFJawher SalemPas encore d'évaluation
- Devis Plomberie SanitaireDocument4 pagesDevis Plomberie SanitaireBarro Ahmed EliePas encore d'évaluation
- 00 Arduino Intro Et MaterielDocument5 pages00 Arduino Intro Et MaterielElaabassi NadaPas encore d'évaluation
- S Rie II Corrig - ELT FondamentaleDocument9 pagesS Rie II Corrig - ELT FondamentaleOUSSAMA BOUZEGAOUPas encore d'évaluation
- 4 - Serie - Grafcet - NV 2Document5 pages4 - Serie - Grafcet - NV 2AYMAN COUKIPas encore d'évaluation
- FR OcteDocument195 pagesFR OctesilviuPas encore d'évaluation
- Galet TendeurDocument3 pagesGalet Tendeuralfred mathi NDOLOPas encore d'évaluation
- PRESENTATION REFORME CACES R4XX-convertiDocument14 pagesPRESENTATION REFORME CACES R4XX-convertiAhmed GabiPas encore d'évaluation
- Cuisine Playmobil Maison ModerneDocument1 pageCuisine Playmobil Maison Modernetatiana jeanPas encore d'évaluation
- Devoir de Controle N° 3 - DTDocument2 pagesDevoir de Controle N° 3 - DTArfaoui AymenPas encore d'évaluation
- Manuel Utilisateur z800Document188 pagesManuel Utilisateur z800Audrey CaramellePas encore d'évaluation