Vous aimerez peut-être aussi
- Sujet Fenêtre de Toit - CorrigéDocument9 pagesSujet Fenêtre de Toit - CorrigéMedinePas encore d'évaluation
- 718s FR 1 c4 Apm Gamme DxiDocument44 pages718s FR 1 c4 Apm Gamme DxiAbdelkader Gouddi100% (2)
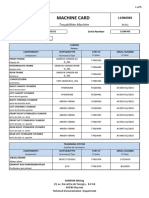
- L15B6365 DS311 MachineCardDocument5 pagesL15B6365 DS311 MachineCardAngel Saravia PaduaPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DT Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDocument2 pagesDevoir de Contrôle N°1 - Génie Mécanique DT Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow75% (8)
- Montage Moteur DieselDocument5 pagesMontage Moteur DieselIbrahim Khalil0% (1)
- Extrait Dentretien Dembauche en Anglais Français PDFDocument9 pagesExtrait Dentretien Dembauche en Anglais Français PDFJamilaTariqPas encore d'évaluation
- Memoire Corrige PDFDocument76 pagesMemoire Corrige PDFNoyau MaazouzPas encore d'évaluation
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- SC640Document11 pagesSC640derbalijalelPas encore d'évaluation
- Ds11213 4st Sousse Complet Prod Pots Miel PRDocument35 pagesDs11213 4st Sousse Complet Prod Pots Miel PRFadwa GHANIPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem AbdelkarimDocument11 pagesDevoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem Abdelkarimيس المباركيPas encore d'évaluation
- DTP 28 36 - Parts ManualDocument41 pagesDTP 28 36 - Parts ManualAn NguyenPas encore d'évaluation
- Situation Sol-4Document4 pagesSituation Sol-4MascariPas encore d'évaluation
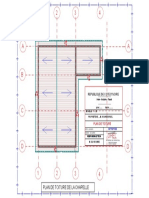
- Plan de Toiture ChapelleDocument1 pagePlan de Toiture ChapelleOhel servicetechPas encore d'évaluation
- 03-Moteur Frein À Boite VitesseDocument5 pages03-Moteur Frein À Boite Vitessesyrine.mlikaaPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Forage 4Document2 pagesForage 4MascariPas encore d'évaluation
- Sujet 07 Cuves CompresseurDocument29 pagesSujet 07 Cuves CompresseuraizddinPas encore d'évaluation
- 11Document17 pages11Patról150Pas encore d'évaluation
- Despiece Des40332 Fagor Sr-45!60!80Document35 pagesDespiece Des40332 Fagor Sr-45!60!80Nữa Đi EmPas encore d'évaluation
- Reconditionnement MoteurDocument29 pagesReconditionnement MoteurDahPas encore d'évaluation
- 2 Epreuve E4 Mai 2015 (Page 32 Couleur)Document39 pages2 Epreuve E4 Mai 2015 (Page 32 Couleur)SALAH EDDINE HESSANEPas encore d'évaluation
- De La Subsidiarite A La ReussiteDocument16 pagesDe La Subsidiarite A La ReussiteyassinedoPas encore d'évaluation
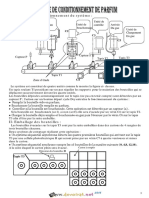
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Correction Du DEVOIR DE Controle N1-2AS-2019Document4 pagesCorrection Du DEVOIR DE Controle N1-2AS-2019Jalel Khadraoui89% (9)
- Devoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineOumayma BoudaboussPas encore d'évaluation
- DC3 4 SCT (12-13) Corr Came XDocument16 pagesDC3 4 SCT (12-13) Corr Came XWagih MrassiPas encore d'évaluation
- Devoir de Contrôle N°1 2ème D7Document2 pagesDevoir de Contrôle N°1 2ème D7Jridette Walid100% (2)
- BAC Technique Tunisie 2015 Corrections de La Session Principale 1Document51 pagesBAC Technique Tunisie 2015 Corrections de La Session Principale 1Ahmed HamadaPas encore d'évaluation
- Sujet: Système de Production Par PoinçonnageDocument9 pagesSujet: Système de Production Par PoinçonnagefranzPas encore d'évaluation
- Manuel ISOFAST C35 PDFDocument67 pagesManuel ISOFAST C35 PDFadel berguiPas encore d'évaluation
- 4 SC Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 SC Tech-dt-11-12-Systeme Automatique de MoulageezzinePas encore d'évaluation
- Groupe 70 M154FR 1.0.0Document28 pagesGroupe 70 M154FR 1.0.0silenkodmitrij33Pas encore d'évaluation
- Examen TechniqueDocument41 pagesExamen TechniqueZiko ItchiPas encore d'évaluation
- DS1 1ère 22 23 BrideDocument6 pagesDS1 1ère 22 23 BrideNajla AmriPas encore d'évaluation
- FP Choker FRDocument1 pageFP Choker FRvpn1 vpn1Pas encore d'évaluation
- Forage 2Document2 pagesForage 2MascariPas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- DC3 2èmeSC2 22 23Document6 pagesDC3 2èmeSC2 22 23Adam BenPas encore d'évaluation
- Ih - Nacht - Dev - X - 200 - XXX - 305 - Aa05 - Liste - U - BoltDocument30 pagesIh - Nacht - Dev - X - 200 - XXX - 305 - Aa05 - Liste - U - BoltMacarena Martín UriolPas encore d'évaluation
- Details 3Document1 pageDetails 3Licdarmer MapaghaPas encore d'évaluation
- 6625 U11 Dossier TechniqueDocument23 pages6625 U11 Dossier Techniqueboukottaya borhenePas encore d'évaluation
- Devoir de Contrôle N°2 2ème Semestre - Génie Mécanique Un Palettiseur - Bac Technique (2018-2019) MR Dhifaoui AbdelwahebDocument9 pagesDevoir de Contrôle N°2 2ème Semestre - Génie Mécanique Un Palettiseur - Bac Technique (2018-2019) MR Dhifaoui Abdelwahebabdelbasset110% (1)
- Pompe Injection Diesel VP44 Problèmes Solutions DépannageDocument9 pagesPompe Injection Diesel VP44 Problèmes Solutions DépannageDany toboys100% (1)
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanDocument14 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanMohamed SaifPas encore d'évaluation
- 2015-2016 Cata Export Interactif PDF 370 Part 112-246 PDFDocument135 pages2015-2016 Cata Export Interactif PDF 370 Part 112-246 PDFLuc Mutombo MukuluPas encore d'évaluation
- Sib Industrie Interieur 092019Document208 pagesSib Industrie Interieur 092019abde yadanePas encore d'évaluation
- DS1-DT-Carreaux CeramiquesDocument4 pagesDS1-DT-Carreaux CeramiquesMouad MemniPas encore d'évaluation
- treEPREUVE DE CONS ELECTROMEC T2 1ER GR 2023 PDFDocument7 pagestreEPREUVE DE CONS ELECTROMEC T2 1ER GR 2023 PDFmbayepbPas encore d'évaluation
- DeoirDocument6 pagesDeoirbasmaPas encore d'évaluation
- Boite de Vitesses AutomatiqueDocument4 pagesBoite de Vitesses AutomatiqueNeliodu59100% (1)
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Banderouleuse - Bac Technique (2013-2014) MR Ben Abdallah MarouanDocument17 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Banderouleuse - Bac Technique (2013-2014) MR Ben Abdallah MarouanKhalil Bkekri100% (2)
- ASSERVISSEMENTDocument132 pagesASSERVISSEMENTAhmed IdrissiPas encore d'évaluation
- TP D'électrotechnique: Onduleur Triphasé 24 VoltsDocument5 pagesTP D'électrotechnique: Onduleur Triphasé 24 VoltsJason BonePas encore d'évaluation
- PumpTutor NGDocument1 pagePumpTutor NGNACER74Pas encore d'évaluation
- Respecter Les Consignes Et Les Procedures: Mi V 33 A1Document11 pagesRespecter Les Consignes Et Les Procedures: Mi V 33 A1KOUADIO PATRICEPas encore d'évaluation
- Boite VitessesDocument3 pagesBoite Vitessesfoued chbichibPas encore d'évaluation
- Orthobloc: Systèmes D'entraînement - Drive Systems Antriebssysteme - Sistemas de AccionamientoDocument174 pagesOrthobloc: Systèmes D'entraînement - Drive Systems Antriebssysteme - Sistemas de AccionamientoAlexander Dominguez RamonPas encore d'évaluation
- Reduct EurDocument2 pagesReduct EurOUTEMSAA80% (5)
- Je joue avec les mots, 5e année: Édition revue et corrigéeD'EverandJe joue avec les mots, 5e année: Édition revue et corrigéePas encore d'évaluation
- Pelle EC180 : Présentation Du SystèmeDocument6 pagesPelle EC180 : Présentation Du Systèmehousinmechani1Pas encore d'évaluation
- T1 GP1 Meca 2022Document6 pagesT1 GP1 Meca 2022housinmechani1Pas encore d'évaluation
- Caplp Externe Section G Nie M Canique Option Construction - Sujet de La Premi Re Preuve Crite de La Session 2022 1777Document45 pagesCaplp Externe Section G Nie M Canique Option Construction - Sujet de La Premi Re Preuve Crite de La Session 2022 1777housinmechani1Pas encore d'évaluation
- Devoir de Contrôle N°1: Machine A RainurerDocument10 pagesDevoir de Contrôle N°1: Machine A Rainurerhousinmechani1Pas encore d'évaluation
- Niveau4 - UtiliserLesModulesPourRésoudreUnProblème (Ce Fichier Est Partagé Dans Google Class)Document9 pagesNiveau4 - UtiliserLesModulesPourRésoudreUnProblème (Ce Fichier Est Partagé Dans Google Class)housinmechani1Pas encore d'évaluation
- Devoir de Contrôle N°1 2010 2011 (Ben Amar Mabrouk)Document11 pagesDevoir de Contrôle N°1 2010 2011 (Ben Amar Mabrouk)housinmechani1Pas encore d'évaluation
- Niveau1 ChainesEtBoucles IntroductionDocument10 pagesNiveau1 ChainesEtBoucles Introductionhousinmechani1Pas encore d'évaluation
- Book 1Document2 pagesBook 1housinmechani1Pas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - MECANISME ENTRAINEMENT DU TAPIS - Bac Technique (2017-2018) MR GHORBEL MAMDOUHDocument7 pagesDevoir de Synthèse N°1 - Technologie - MECANISME ENTRAINEMENT DU TAPIS - Bac Technique (2017-2018) MR GHORBEL MAMDOUHhousinmechani1Pas encore d'évaluation
- Imprimé Niveau6 ComprendreLesTableaux (Problèmes)Document2 pagesImprimé Niveau6 ComprendreLesTableaux (Problèmes)housinmechani1Pas encore d'évaluation
- TP2 - Excel (4) .Xls CorrectionDocument13 pagesTP2 - Excel (4) .Xls Correctionhousinmechani1Pas encore d'évaluation
- Imprimé - Niveau3 - LesModules - Introduction (Ce Fichier Se Trouve Imprimé Dans Les Documents de La Formation)Document1 pageImprimé - Niveau3 - LesModules - Introduction (Ce Fichier Se Trouve Imprimé Dans Les Documents de La Formation)housinmechani1Pas encore d'évaluation
- Niveau2 ChainesEtBoucles ProblèmesDocument2 pagesNiveau2 ChainesEtBoucles Problèmeshousinmechani1Pas encore d'évaluation
- SérieActivités 1 NiveauDeBaseDocument10 pagesSérieActivités 1 NiveauDeBasehousinmechani1Pas encore d'évaluation
- Comment Lancer Un Examen EvaluationDocument9 pagesComment Lancer Un Examen Evaluationhousinmechani1Pas encore d'évaluation
- Extrudeuse: Construction MecaniqueDocument4 pagesExtrudeuse: Construction Mecaniquehousinmechani1Pas encore d'évaluation
- Sujet 10 LogoDocument5 pagesSujet 10 Logohousinmechani1Pas encore d'évaluation
- t2 Con Mec2008Document7 pagest2 Con Mec2008housinmechani1Pas encore d'évaluation
- Sujet 23 - LogoDocument6 pagesSujet 23 - Logohousinmechani1Pas encore d'évaluation
- BTS AVA 1. 5 TD - Transmission de Puissance Par Trains Épicycloïdaux1AFSM - PDFDocument7 pagesBTS AVA 1. 5 TD - Transmission de Puissance Par Trains Épicycloïdaux1AFSM - PDFhousinmechani1Pas encore d'évaluation
- Tuiles ToitureDocument3 pagesTuiles ToitureGuy EffaPas encore d'évaluation
- Conditionnement D'épicesDocument3 pagesConditionnement D'épicesNabil RamPas encore d'évaluation
- PétroleDocument3 pagesPétroleSamsouma SoumiaPas encore d'évaluation
- Compte Rendu TP1Document3 pagesCompte Rendu TP1ventury talPas encore d'évaluation
- Indian Plant Ammonia RevampDocument12 pagesIndian Plant Ammonia RevampwaqashabibPas encore d'évaluation
- Le Soufflet UniverselDocument8 pagesLe Soufflet UniverselpeterpunxPas encore d'évaluation
- Guide Dtu2541et2542Document16 pagesGuide Dtu2541et2542TAMMA HOUSSAM ELDDINPas encore d'évaluation
- Cours de Construction Metallique PDFDocument96 pagesCours de Construction Metallique PDFDiarra Falassa100% (1)
- Réservoirs Haute Pression en CompositesDocument3 pagesRéservoirs Haute Pression en CompositesalphaPas encore d'évaluation
- 000 Projet BPDocument1 page000 Projet BPboubacar KOITAPas encore d'évaluation
- Descriptif Technique Pelle Hydraulique Poids en Ordre de MarcheDocument10 pagesDescriptif Technique Pelle Hydraulique Poids en Ordre de MarcheLiebherrPas encore d'évaluation
- Artzimut 4 Promenades D'art À PerpignanDocument2 pagesArtzimut 4 Promenades D'art À Perpignanantou74Pas encore d'évaluation
- CCTP 2 Menuis ExtDocument11 pagesCCTP 2 Menuis ExtEdouard Francis JarethPas encore d'évaluation
- Electroméc ElectromécaniqueDocument6 pagesElectroméc ElectromécaniqueDjẹlli MẹđjadiPas encore d'évaluation
- SME AmeublementDocument116 pagesSME AmeublementsusCities67% (3)
- Programme 2018 FR 3Document1 pageProgramme 2018 FR 3Zaki HerradPas encore d'évaluation
- Fascicule Merise & BD - 1Document100 pagesFascicule Merise & BD - 1yao josephPas encore d'évaluation
- Automatismes Chapitre01Document50 pagesAutomatismes Chapitre01Soukaina Dahbi100% (1)
- Histoire Et Fabrication de La Porcelaine de LimogesDocument66 pagesHistoire Et Fabrication de La Porcelaine de LimogestaoufikPas encore d'évaluation
- Liebherr Électrique 312Document16 pagesLiebherr Électrique 312LiebherrPas encore d'évaluation
- Semelle 01Document97 pagesSemelle 01Ing.esdras ABLYPas encore d'évaluation
- DMP #21 - RectoDocument2 pagesDMP #21 - RectodmpwebPas encore d'évaluation
- PDF ElectriciteDocument5 pagesPDF Electriciteʚḯɞ Mäḑjïdoü Bãrcelønē ʚḯɞPas encore d'évaluation
- Circulaire 1934 Béton ArméDocument67 pagesCirculaire 1934 Béton ArméRicardo100% (1)
- PROJET DE fIN D ETUDES Cegelec PDFDocument125 pagesPROJET DE fIN D ETUDES Cegelec PDFAbdelhak AresmoukPas encore d'évaluation