Vous aimerez peut-être aussi
- Dcn3 3t1 Mecanisme de Transmission CorrectionDocument4 pagesDcn3 3t1 Mecanisme de Transmission CorrectionGuiliass100% (1)
- App Rep-STE-STM-SMBDocument6 pagesApp Rep-STE-STM-SMBESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Note de Calcul Charpente Metallique 1Document66 pagesNote de Calcul Charpente Metallique 1Brahim Mouhcine100% (2)
- Note de Calcul Charpente Metallique 1 PDFDocument66 pagesNote de Calcul Charpente Metallique 1 PDFMoussaoui Fateh MadaniPas encore d'évaluation
- Sujet Mai-2018-Poste de Perçage Automatique-RepDocument9 pagesSujet Mai-2018-Poste de Perçage Automatique-RepMaryam MaryamPas encore d'évaluation
- Note de Calcul Charpente Métallique12Document74 pagesNote de Calcul Charpente Métallique12Bassem GhorbelPas encore d'évaluation
- Fin de Formation - Synthése ESA 2022 (TEST3) - 1Document6 pagesFin de Formation - Synthése ESA 2022 (TEST3) - 1otmane touilPas encore d'évaluation
- Meca Seq 1 TLE F4-BADocument2 pagesMeca Seq 1 TLE F4-BAAnge Kamde100% (1)
- Activités Élèves CorrigéDocument16 pagesActivités Élèves CorrigéAeroEagle100% (1)
- COM ELNI MACHINE 2020 2021 EXAM CorrectionDocument5 pagesCOM ELNI MACHINE 2020 2021 EXAM CorrectionNguefa FabricePas encore d'évaluation
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinPas encore d'évaluation
- DC2 Bras Manipulateur PDFDocument8 pagesDC2 Bras Manipulateur PDFMohamed Adem GhorbelPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Bras Manipulateur - 3ème Technique (2017-2018) MR Ghorbel MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Bras Manipulateur - 3ème Technique (2017-2018) MR Ghorbel Mamdouhfiras shiliPas encore d'évaluation
- Exercice Telecabine v2Document4 pagesExercice Telecabine v2Ma HdiPas encore d'évaluation
- DS2 - RattDocument3 pagesDS2 - RattLahcen ElamraouiPas encore d'évaluation
- DS34STDocument7 pagesDS34STZaraki RiodaPas encore d'évaluation
- Note de Calcul Charpente Metallique 2 PDFDocument42 pagesNote de Calcul Charpente Metallique 2 PDFalaa2222Pas encore d'évaluation
- Physique - Lycee Bilingue de Yaounde - Annee Scolaire 2020 - 2021 - Mai 2021 - 2ndec CamerounDocument2 pagesPhysique - Lycee Bilingue de Yaounde - Annee Scolaire 2020 - 2021 - Mai 2021 - 2ndec CamerounManuel Loic FOKO TADJUIDJEPas encore d'évaluation
- TD1 BvaDocument5 pagesTD1 BvamohamedPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIDocument4 pagesDevoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIAmira JebaliPas encore d'évaluation
- Correction EXamen 2018 Actionneur SpéciauxDocument4 pagesCorrection EXamen 2018 Actionneur Spéciauxkhaled100% (1)
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (1)
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- Devoir 1Document5 pagesDevoir 1talhiaprzPas encore d'évaluation
- Corrigé TD1 TRSF de MVTDocument5 pagesCorrigé TD1 TRSF de MVTأشرف عبودPas encore d'évaluation
- Devoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaDocument4 pagesDevoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaGalena PrincePas encore d'évaluation
- Motoreducteurs BH PDFDocument64 pagesMotoreducteurs BH PDFIkeoPas encore d'évaluation
- DM Statique Monte MeubleDocument3 pagesDM Statique Monte Meublemollardtom5Pas encore d'évaluation
- Devoir de Controle N3-Transmission de mvt-2011Document3 pagesDevoir de Controle N3-Transmission de mvt-2011GR GARMANI100% (2)
- Fin de Formation - synthéseTS ESA CorrigéDocument11 pagesFin de Formation - synthéseTS ESA CorrigéAyoub HallaPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- (Annales 3GE) (ETEP1) (DS) 2014 SDocument5 pages(Annales 3GE) (ETEP1) (DS) 2014 SHamza SadikPas encore d'évaluation
- Exercice Courroies Chaines eDocument2 pagesExercice Courroies Chaines echrisPas encore d'évaluation
- TP 01-Tpe 62Document3 pagesTP 01-Tpe 62Âÿ ØübPas encore d'évaluation
- Equi Serie6Document7 pagesEqui Serie6Aurelien BourgoisPas encore d'évaluation
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- Apsim CNC Sii MP Psi 2020Document13 pagesApsim CNC Sii MP Psi 2020Lamiaa CherkaPas encore d'évaluation
- Note de Calcul Abri 10x25Document56 pagesNote de Calcul Abri 10x25Meriem AzirouPas encore d'évaluation
- TD T 7.2 TEC Vis EcrouDocument2 pagesTD T 7.2 TEC Vis Ecrouisrael MelchisedechPas encore d'évaluation
- Activités ÉlèvesDocument16 pagesActivités ÉlèvesAeroEaglePas encore d'évaluation
- C33 PDFDocument5 pagesC33 PDFaymen princePas encore d'évaluation
- Dossier Technique 95spDocument7 pagesDossier Technique 95spouhssainanouarPas encore d'évaluation
- Application 1 Palan Electrique A Chaine PDFDocument4 pagesApplication 1 Palan Electrique A Chaine PDFGORA NDIAYE0% (1)
- Chap 3 Les CompteursDocument10 pagesChap 3 Les CompteursAhmed BelhadjPas encore d'évaluation
- 1 D - Phy - 2Document4 pages1 D - Phy - 2Eric KeutchiamenPas encore d'évaluation
- 2b3-Mecanique-Cinematique RotationDocument5 pages2b3-Mecanique-Cinematique Rotation49william66 49william66Pas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- G. Pinson - Physique AppliquéeDocument5 pagesG. Pinson - Physique Appliquéerached123Pas encore d'évaluation
- LPP16 Etude Plan Incline ProfDocument4 pagesLPP16 Etude Plan Incline ProfFaiza MostefaiPas encore d'évaluation
- Test - Dim Eléments de Machines - lgm2 - 2021Document5 pagesTest - Dim Eléments de Machines - lgm2 - 2021Khaled GammoudiPas encore d'évaluation
- Moteur synchroneDocument8 pagesMoteur synchronehenninour23Pas encore d'évaluation
- Rapport Lab2 DERNIERDocument6 pagesRapport Lab2 DERNIERRachido JazzPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFDocument2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFOtman OtoPas encore d'évaluation
- Ci11 I9 T S1 C4Document13 pagesCi11 I9 T S1 C4Mùstapha MànsouriPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Otman OtoPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Bouraoui Ben AyedPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- caplp-externe-section-g-nie-m-canique-option-construction---sujet-de-la-premi-re-preuve-crite-de-la-session-2022-1777Document45 pagescaplp-externe-section-g-nie-m-canique-option-construction---sujet-de-la-premi-re-preuve-crite-de-la-session-2022-1777housinmechani1Pas encore d'évaluation
- Pelle EC180 : Présentation Du SystèmeDocument6 pagesPelle EC180 : Présentation Du Systèmehousinmechani1Pas encore d'évaluation
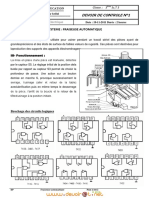
- Devoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachDocument6 pagesDevoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachGTO FFPas encore d'évaluation
- Manuel Cours4t 2023 OptimizedDocument214 pagesManuel Cours4t 2023 OptimizedBouamama MouradPas encore d'évaluation
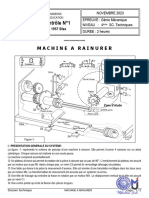
- Devoir de Contrôle N°1: Machine A RainurerDocument10 pagesDevoir de Contrôle N°1: Machine A Rainurerhousinmechani1Pas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - MECANISME ENTRAINEMENT DU TAPIS - Bac Technique (2017-2018) MR GHORBEL MAMDOUHDocument7 pagesDevoir de Synthèse N°1 - Technologie - MECANISME ENTRAINEMENT DU TAPIS - Bac Technique (2017-2018) MR GHORBEL MAMDOUHhousinmechani1Pas encore d'évaluation
- Devoir de Contrôle N°1 2010 2011 (Ben Amar Mabrouk)Document11 pagesDevoir de Contrôle N°1 2010 2011 (Ben Amar Mabrouk)housinmechani1Pas encore d'évaluation
- TP2 - Excel (4) .Xls CorrectionDocument13 pagesTP2 - Excel (4) .Xls Correctionhousinmechani1Pas encore d'évaluation
- Imprimé Niveau6 ComprendreLesTableaux (Problèmes)Document2 pagesImprimé Niveau6 ComprendreLesTableaux (Problèmes)housinmechani1Pas encore d'évaluation
- Book 1Document2 pagesBook 1housinmechani1Pas encore d'évaluation
- Niveau4 - UtiliserLesModulesPourRésoudreUnProblème (Ce Fichier Est Partagé Dans Google Class)Document9 pagesNiveau4 - UtiliserLesModulesPourRésoudreUnProblème (Ce Fichier Est Partagé Dans Google Class)housinmechani1Pas encore d'évaluation
- TP2 ExcelDocument8 pagesTP2 ExcelBillel KhefifiPas encore d'évaluation
- TP2 - Excel (4) .Xls CorrectionDocument13 pagesTP2 - Excel (4) .Xls Correctionhousinmechani1Pas encore d'évaluation
- Niveau2 ChainesEtBoucles ProblèmesDocument2 pagesNiveau2 ChainesEtBoucles Problèmeshousinmechani1Pas encore d'évaluation
- Le Nombre Lisse: Sections Durée: 1h Coefficient de L'épreuve: 0.5Document2 pagesLe Nombre Lisse: Sections Durée: 1h Coefficient de L'épreuve: 0.5Rayen NajjarPas encore d'évaluation
- Comment Lancer Un Examen EvaluationDocument9 pagesComment Lancer Un Examen Evaluationhousinmechani1Pas encore d'évaluation
- Imprimé - Niveau3 - LesModules - Introduction (Ce Fichier Se Trouve Imprimé Dans Les Documents de La Formation)Document1 pageImprimé - Niveau3 - LesModules - Introduction (Ce Fichier Se Trouve Imprimé Dans Les Documents de La Formation)housinmechani1Pas encore d'évaluation
- Niveau1 ChainesEtBoucles IntroductionDocument10 pagesNiveau1 ChainesEtBoucles Introductionhousinmechani1Pas encore d'évaluation
- Sujet 23 - LogoDocument6 pagesSujet 23 - Logohousinmechani1Pas encore d'évaluation
- Extrudeuse: Construction MecaniqueDocument4 pagesExtrudeuse: Construction Mecaniquehousinmechani1Pas encore d'évaluation
- Sujet 10 LogoDocument5 pagesSujet 10 Logohousinmechani1Pas encore d'évaluation
- Chapitre 3Document32 pagesChapitre 3MOHAMED REDHA SOLTANIPas encore d'évaluation
- DIMENSIONNEMENT & VERIFICATION FLEXION COMPOSEE D'un Arêtier EC5 FEUILLE DE CALCULDocument169 pagesDIMENSIONNEMENT & VERIFICATION FLEXION COMPOSEE D'un Arêtier EC5 FEUILLE DE CALCULjeremie_boissonPas encore d'évaluation
- Chapitre I La Flexion SimpleDocument9 pagesChapitre I La Flexion SimpleOussama AggounPas encore d'évaluation
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- 02 EurocodesDocument7 pages02 EurocodeshassenPas encore d'évaluation
- Resume Thermochimie SMPC SMIA S2Document40 pagesResume Thermochimie SMPC SMIA S2abdelwahed_elwafi80% (5)
- Archives Concours Etrangers 2018 2019 2020Document113 pagesArchives Concours Etrangers 2018 2019 2020Adore VirgiPas encore d'évaluation
- TD n°1S3B-2023Document2 pagesTD n°1S3B-2023ulrichgnamien49Pas encore d'évaluation
- 15 53 LemaireDocument8 pages15 53 LemairekadaPas encore d'évaluation
- RDM GC 151220Document50 pagesRDM GC 151220brics2088Pas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- Rapport PFA 1Document94 pagesRapport PFA 1Mouad HDPas encore d'évaluation
- Bilame CirculaireDocument5 pagesBilame CirculaireMokhtar ATTARIPas encore d'évaluation
- G2OTECH Resistance Au Cisaillement LGCDocument18 pagesG2OTECH Resistance Au Cisaillement LGCibtissamfakhouri777Pas encore d'évaluation
- MMC4Document33 pagesMMC4moradPas encore d'évaluation
- Mémoire de Fin D'études Master Nouhayla JoutDocument61 pagesMémoire de Fin D'études Master Nouhayla JoutnouhailaPas encore d'évaluation
- TD 5GCDocument80 pagesTD 5GCYasser marzouguePas encore d'évaluation
- Flexion Plane SimpleDocument20 pagesFlexion Plane SimpleMIMFS93% (14)
- Contrôles Physique 2016 2019Document6 pagesContrôles Physique 2016 2019Abderahman DaouiPas encore d'évaluation
- SJ VomDocument27 pagesSJ Vomkacem19985Pas encore d'évaluation
- VTT ExercicesDocument3 pagesVTT ExercicesCharles GoPas encore d'évaluation
- 16 GCivil ConstructionMétalliqueMixteDocument54 pages16 GCivil ConstructionMétalliqueMixteamelPas encore d'évaluation
- Cours-Ensa Lyon PDFDocument98 pagesCours-Ensa Lyon PDFAyoub Frigini100% (1)
- Résumé de StatiqueDocument5 pagesRésumé de Statiqueamine amiPas encore d'évaluation
- Chap2 Lembrayage Mécanique - E. LerningDocument11 pagesChap2 Lembrayage Mécanique - E. LerningDavid100% (1)
- Rapport PFE CorrigéDocument174 pagesRapport PFE CorrigésahbiPas encore d'évaluation
- Corrige Type de L Examen Final Ar m2 Telecom 23 Janvier 2016Document7 pagesCorrige Type de L Examen Final Ar m2 Telecom 23 Janvier 2016فغلو عبد الكريمPas encore d'évaluation
- TP1 Forces Exercees Par Un Jet Deau 1. ODocument14 pagesTP1 Forces Exercees Par Un Jet Deau 1. OMouadBtkPas encore d'évaluation
- Corriges12 PDFDocument29 pagesCorriges12 PDFTRAOREPas encore d'évaluation
- PC Gene 007 Sujet Exo2 Phy Klenergies 2Document5 pagesPC Gene 007 Sujet Exo2 Phy Klenergies 2sarahPas encore d'évaluation