Vous aimerez peut-être aussi
- Devoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem AbdelkarimDocument11 pagesDevoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem Abdelkarimيس المباركيPas encore d'évaluation
- Machine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Document5 pagesMachine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Adel KmimechPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- DC1 2éme 2020Document6 pagesDC1 2éme 2020Mohsen Laabidi100% (1)
- Dossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesDossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesomatrPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDhia Cherni100% (1)
- Série de Révision Bac N1 Etude Technologique Part 1Document20 pagesSérie de Révision Bac N1 Etude Technologique Part 1Hamami AymenPas encore d'évaluation
- Ds1 1as 2022 Fin YoutubeDocument5 pagesDs1 1as 2022 Fin YoutubeAhmed Aloui100% (1)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiDocument3 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiRouaissi Ridha0% (1)
- Devoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelDocument4 pagesDevoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelHamami Aymen100% (1)
- Serre TubesDocument4 pagesSerre TubesBesbes Zied100% (1)
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirPas encore d'évaluation
- 4 SC Tech Ds2 2016 17 DPGM Rayons X 2Document4 pages4 SC Tech Ds2 2016 17 DPGM Rayons X 2DHia Ben AichaPas encore d'évaluation
- Epreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalDocument7 pagesEpreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalSaliouPas encore d'évaluation
- Saber DC N1 1S3 2021 2022'Document4 pagesSaber DC N1 1S3 2021 2022'Adam BensaidPas encore d'évaluation
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- DT Etau Orientable de Modelisme DT Etau PDFDocument5 pagesDT Etau Orientable de Modelisme DT Etau PDFMohamed Saif100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - Cale Reglable - 3ème Technique (2017-2018) MR Mlaouhi SlaheddineDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Cale Reglable - 3ème Technique (2017-2018) MR Mlaouhi Slaheddineyassine zitouni100% (3)
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienPas encore d'évaluation
- Cours Sur Les EmbrayagesDocument7 pagesCours Sur Les Embrayagesibrahim rabbajPas encore d'évaluation
- Bac - 2019-DR - Corrigé1 (Mec)Document8 pagesBac - 2019-DR - Corrigé1 (Mec)Wagih MrassiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - PERCEUSE A COLONNES - 2ème Sciences (2015-2016) MR Raouafi - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - PERCEUSE A COLONNES - 2ème Sciences (2015-2016) MR Raouafi - AbdallahAmeur AdemePas encore d'évaluation
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- Technique PDFDocument23 pagesTechnique PDFAnonymous brJQnGr1kPas encore d'évaluation
- Invers 2020Document3 pagesInvers 2020Mortadha RabahPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow100% (1)
- DC1 1ére 2020Document4 pagesDC1 1ére 2020Mohsen Laabidi100% (3)
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- t2 Con Elec2015 CadreuseDocument6 pagest2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Dev de Synthése 1éreDocument4 pagesDev de Synthése 1éreSaifeddine Briki100% (2)
- Devoir de Controle N: Presse Manuelle À ŒilletsDocument4 pagesDevoir de Controle N: Presse Manuelle À ŒilletsAdel Kmimech100% (1)
- Devoir de Synthése N3-2AS-2013-FinDocument6 pagesDevoir de Synthése N3-2AS-2013-FinJay Jay MbayomPas encore d'évaluation
- Act2 (Tendeur de Courroie) P218-224Document7 pagesAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouPas encore d'évaluation
- Embr 2020Document4 pagesEmbr 2020Mortadha RabahPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDocument6 pagesDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecPas encore d'évaluation
- Série D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma Seniorita100% (3)
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument12 pagesDevoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi Slaheddinemoussa zainPas encore d'évaluation
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- Bride Hydraulique Corrigé Modli PDFDocument2 pagesBride Hydraulique Corrigé Modli PDFMahfoud Natsu100% (1)
- Enrouleur de RessortDocument5 pagesEnrouleur de RessortMountaser Bouaoud100% (1)
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
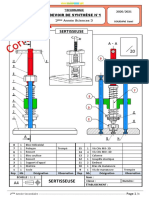
- Correction Devoir+de+Controle+N1 2AS 2021 SertisseuseDocument4 pagesCorrection Devoir+de+Controle+N1 2AS 2021 SertisseuseGuiliassPas encore d'évaluation
- 02 Poupee MobileDocument6 pages02 Poupee Mobilemasteratsii100% (1)
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDocument4 pagesDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFDocument10 pagesDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaPas encore d'évaluation
- Epreuve 2e Seq Construction Mecanique 1MVTDocument2 pagesEpreuve 2e Seq Construction Mecanique 1MVTkaka kaladzePas encore d'évaluation
- DC1 1AS Casse Noix NOV 2020Document4 pagesDC1 1AS Casse Noix NOV 2020TarekMostapha50% (2)
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Système Robo YoupiDocument5 pagesSystème Robo YoupiWalid Fattoum100% (2)
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- Devoir+de+Synthèse+N1 2AS 2021 SertisseuseDocument5 pagesDevoir+de+Synthèse+N1 2AS 2021 SertisseuseGuiliassPas encore d'évaluation
- DT - PalettiseurDocument5 pagesDT - PalettiseurMaghrebi YassinPas encore d'évaluation
- Encaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeDocument4 pagesEncaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeTaieb BentaherPas encore d'évaluation
- 01 Embrayage Reducteur 1 PDFDocument4 pages01 Embrayage Reducteur 1 PDFAchref LtmPas encore d'évaluation
- Forod 2bac Si STM s1 3Document17 pagesForod 2bac Si STM s1 3Ben abd el jalil AyoubPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique Système de Préparation D'un Produit Buvable - Bac Technique (2012-2013) MR Ben Abdallah Marouan PDFDocument11 pagesDevoir de Contrôle N°2 - Génie Mécanique Système de Préparation D'un Produit Buvable - Bac Technique (2012-2013) MR Ben Abdallah Marouan PDFabdelbasset11100% (1)
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Docprof AnalyseDocument2 pagesDocprof Analyseabdelbasset11Pas encore d'évaluation
- Doceleve AnalyseDocument2 pagesDoceleve Analyseabdelbasset11Pas encore d'évaluation
- Représentation GraphiqueDocument7 pagesReprésentation GraphiquetaiebshowPas encore d'évaluation
- Mi Iv 321 A PDFDocument9 pagesMi Iv 321 A PDFKhadija LabriziPas encore d'évaluation
- Dcn3 3t1 Mecanisme de Transmission CorrectionDocument4 pagesDcn3 3t1 Mecanisme de Transmission CorrectionGuiliass100% (1)
- Formulaire de Mecanique PDFDocument11 pagesFormulaire de Mecanique PDFsldwPas encore d'évaluation
- 1 ScaniaDocument47 pages1 ScaniayoussefPas encore d'évaluation
- Akrour YacineDocument96 pagesAkrour YacineSalah eddine ZouzouPas encore d'évaluation
- Catalogue Logiciels 2010Document52 pagesCatalogue Logiciels 2010Mohamed ChaabanePas encore d'évaluation
- ALM - Fabricant de Convoyeurs Aériens: Définition de Votre ProjetDocument22 pagesALM - Fabricant de Convoyeurs Aériens: Définition de Votre ProjetWafa Bouzid100% (1)
- Couronne D'orientation, Roulement À Rouleaux Croisés, Sans DentureDocument2 pagesCouronne D'orientation, Roulement À Rouleaux Croisés, Sans DentureWalidPas encore d'évaluation
- Guide Des Metiers PDFDocument64 pagesGuide Des Metiers PDFMalek BenBouYahiaPas encore d'évaluation
- 856f6f0d PDFDocument19 pages856f6f0d PDFakram araibiaPas encore d'évaluation
- Rapoort de Stage BBDocument40 pagesRapoort de Stage BBSouiai Mohammed AnouerPas encore d'évaluation
- Leçon 1Document9 pagesLeçon 1Je suis Je suisPas encore d'évaluation
- 2020 KTM 125 Duke 23Document271 pages2020 KTM 125 Duke 23Pieces Racing NicoPas encore d'évaluation
- Grundfos - SP 14 23Document14 pagesGrundfos - SP 14 23Chaibou SaleyPas encore d'évaluation
- CH IV Paliers Coussinets Et RoulementsDocument14 pagesCH IV Paliers Coussinets Et RoulementsIbrahim HassinePas encore d'évaluation
- Enlever Les 4 Ou 6 Vis Fixant La Plate-Forme Au TracDocument26 pagesEnlever Les 4 Ou 6 Vis Fixant La Plate-Forme Au TracRodolphe Sandrine VoisyPas encore d'évaluation
- Act 1-3Document6 pagesAct 1-3becem50% (2)
- Inst & Maint Motors FRDocument43 pagesInst & Maint Motors FRmeerak7973Pas encore d'évaluation
- Exercices Rlts Corriges v2Document4 pagesExercices Rlts Corriges v2Soufi Badr100% (4)
- Serviroc: Le Catalogue Graisse RoulementDocument11 pagesServiroc: Le Catalogue Graisse RoulementAzzeddine BendahakPas encore d'évaluation
- BMB-6209 080S2 Ub108a 20211020Document5 pagesBMB-6209 080S2 Ub108a 20211020dali abdelatifPas encore d'évaluation
- SMoteur LDocument132 pagesSMoteur LSara SwikiraPas encore d'évaluation
- Embrayage FRDocument28 pagesEmbrayage FRAbdo AbdoPas encore d'évaluation
- Logan TransmiLOGAN Transmisie-FR MR-388.PDsie FR MR 388Document43 pagesLogan TransmiLOGAN Transmisie-FR MR-388.PDsie FR MR 388Fleancu Cristian100% (1)
- AMDECDocument34 pagesAMDECAyoub DaddaPas encore d'évaluation
- D5-1 Classification Des Machines Tournantes PDFDocument12 pagesD5-1 Classification Des Machines Tournantes PDFhamraoui chahrazedPas encore d'évaluation
- NullDocument18 pagesNullLiebherr100% (1)
- C4 PicassoDocument3 pagesC4 PicassoOlivier ParisPas encore d'évaluation
- DESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Document4 pagesDESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Abdelmajid AittalebPas encore d'évaluation