Vous aimerez peut-être aussi
- Didacticiel Papier - Sphinx Iq 2 PDFDocument442 pagesDidacticiel Papier - Sphinx Iq 2 PDFAthenaDona100% (1)
- Série D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHADocument24 pagesSérie D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHAElarbi Jaffel100% (3)
- TD SUPPORT eDocument5 pagesTD SUPPORT emasteratsiiPas encore d'évaluation
- Série de Révision Bac N1 Etude Technologique Part 1Document20 pagesSérie de Révision Bac N1 Etude Technologique Part 1Hamami AymenPas encore d'évaluation
- Unité de Fabrication de Fûts - DPMDocument4 pagesUnité de Fabrication de Fûts - DPMramziPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow100% (1)
- DPM21 22Document4 pagesDPM21 22jetlaoui frajPas encore d'évaluation
- Ex 3 2steDocument4 pagesEx 3 2steHicham MarzouqPas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Devoir de Controle N°4: Distributeur de Carburant GPLDocument4 pagesDevoir de Controle N°4: Distributeur de Carburant GPLjetlaoui frajPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- Bac - 2019-DR - Corrigé1 (Mec)Document8 pagesBac - 2019-DR - Corrigé1 (Mec)Wagih MrassiPas encore d'évaluation
- TD ConstructionDocument6 pagesTD ConstructionYoussef TrimechPas encore d'évaluation
- Correction Ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesCorrection Ds1 Systeme Automatise de Marquage de BoitesAlami ElPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- DPmecaniqueDocument4 pagesDPmecaniquelou louPas encore d'évaluation
- Devoir de Synthèse N°3: I - Analyse FonctionnelleDocument4 pagesDevoir de Synthèse N°3: I - Analyse FonctionnelleJUSDOVIC EDJOZOMBIPas encore d'évaluation
- 4 SC Tech Ds2 2016 17 DPGM Rayons X 2Document4 pages4 SC Tech Ds2 2016 17 DPGM Rayons X 2DHia Ben AichaPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDhia Cherni100% (1)
- DC1 2éme 2020Document6 pagesDC1 2éme 2020Mohsen Laabidi100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- AssemblagesDocument7 pagesAssemblagesAdouni ZakPas encore d'évaluation
- Devoir de Synthése N3-2AS-2013-FinDocument6 pagesDevoir de Synthése N3-2AS-2013-FinJay Jay MbayomPas encore d'évaluation
- Dispositif de Blocage Des Tubes: Devoir de Contrôle N°1Document3 pagesDispositif de Blocage Des Tubes: Devoir de Contrôle N°1Ahmed AlouiPas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had0% (1)
- Série de Révision2 (DR) (Corrigé)Document6 pagesSérie de Révision2 (DR) (Corrigé)Wagih MrassiPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFDocument10 pagesDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaPas encore d'évaluation
- Dev 1 SDocument4 pagesDev 1 SKhaled MaamriPas encore d'évaluation
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- Cours Sur Les EmbrayagesDocument7 pagesCours Sur Les Embrayagesibrahim rabbajPas encore d'évaluation
- TD FreinDocument5 pagesTD FreinHamami AymenPas encore d'évaluation
- Parc A GrumesDocument3 pagesParc A Grumeslou louPas encore d'évaluation
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- PHI-M211-liaison-pivot-tondeuse 2016Document5 pagesPHI-M211-liaison-pivot-tondeuse 2016Francis BECPas encore d'évaluation
- DcN°3-1ère-hachoir-2020-2021 Un ÉlèveDocument4 pagesDcN°3-1ère-hachoir-2020-2021 Un ÉlèveAdam BensaidPas encore d'évaluation
- Serietambour MotoreducteurDocument6 pagesSerietambour Motoreducteurpaire animePas encore d'évaluation
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- Corrige Technique Controle2018 PDFDocument31 pagesCorrige Technique Controle2018 PDFHamami AymenPas encore d'évaluation
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- Enrouleur de RessortDocument5 pagesEnrouleur de RessortMountaser Bouaoud100% (1)
- devoir2AS Cotation Manivelle2Document2 pagesdevoir2AS Cotation Manivelle2samsoum2004295250% (2)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Tayahi100% (1)
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- Guidage Rotation App4Document4 pagesGuidage Rotation App4Oussama MabroukPas encore d'évaluation
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirPas encore d'évaluation
- Série D'exercices N°9 - Génie Mécanique - Cotation FCT Et Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°9 - Génie Mécanique - Cotation FCT Et Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanGhayth Bouzayani100% (1)
- TechniqueDocument8 pagesTechniqueFredj Kriaa100% (2)
- Act2 (Tendeur de Courroie) P218-224Document7 pagesAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouPas encore d'évaluation
- Cotation Fonct 4stDocument6 pagesCotation Fonct 4stRahma BaccarPas encore d'évaluation
- Révision Montage 2ScDocument5 pagesRévision Montage 2ScMarouen Mekki100% (1)
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiDocument3 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiRouaissi Ridha0% (1)
- Dc1 1sec2021 p2Document4 pagesDc1 1sec2021 p2Besbes ZiedPas encore d'évaluation
- C Engrenage Vis Ecrou PDFDocument2 pagesC Engrenage Vis Ecrou PDFIbra Moulay100% (1)
- 1A Devoir de Synthèse N°2 - TM 2014Document6 pages1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiPas encore d'évaluation
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocument4 pagesDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitPas encore d'évaluation
- DPMXDocument5 pagesDPMXezzinePas encore d'évaluation
- D.R DT DS3 MA I2022 REGpour La Prochaine ScéanceDocument8 pagesD.R DT DS3 MA I2022 REGpour La Prochaine Scéanceilyessaoudi13Pas encore d'évaluation
- Dr-Unite de Production Du TSPDocument4 pagesDr-Unite de Production Du TSPGharbi SaifiddinPas encore d'évaluation
- 1.polymérisation RadicalaireDocument36 pages1.polymérisation Radicalaireomatr0% (1)
- 32-Tableau Choix MAG MIGDocument9 pages32-Tableau Choix MAG MIGomatrPas encore d'évaluation
- الامتحان الوطني في المواد المهنية2 2017 مسلك التصنيع الميكانيكي الدورة العاديةDocument10 pagesالامتحان الوطني في المواد المهنية2 2017 مسلك التصنيع الميكانيكي الدورة العاديةomatrPas encore d'évaluation
- 6 - Résumé Polym Ioniques (Résumé Section B) PDFDocument5 pages6 - Résumé Polym Ioniques (Résumé Section B) PDFomatrPas encore d'évaluation
- Cours 1 Polymères (Polymérisation Radicalaire) 2022Document12 pagesCours 1 Polymères (Polymérisation Radicalaire) 2022omatrPas encore d'évaluation
- Cours Technologie de Base PDFDocument27 pagesCours Technologie de Base PDFTran AnhdaoPas encore d'évaluation
- Les Assemblages Thermiques: La Soudure Sous Protection GazeuseDocument16 pagesLes Assemblages Thermiques: La Soudure Sous Protection Gazeuseomatr100% (1)
- Cotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsDocument81 pagesCotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsomatrPas encore d'évaluation
- 1 - Introduction Générale Au SoudageDocument28 pages1 - Introduction Générale Au SoudageomatrPas encore d'évaluation
- Systèmes Hydrauliques Et Pneumatiques: de MULLER André Et SILVA NicolasDocument31 pagesSystèmes Hydrauliques Et Pneumatiques: de MULLER André Et SILVA NicolasomatrPas encore d'évaluation
- Cotation Fonctionnelle Des Pièces Mécaniques: LurpaDocument56 pagesCotation Fonctionnelle Des Pièces Mécaniques: LurpaomatrPas encore d'évaluation
- (Tec) (ME) Liaison EncastrementDocument7 pages(Tec) (ME) Liaison EncastrementSimo StitPas encore d'évaluation
- Binder 1Document2 pagesBinder 1omatrPas encore d'évaluation
- Chapitre 2-1A Modélisation Cinématique Des LiaisonsDocument14 pagesChapitre 2-1A Modélisation Cinématique Des LiaisonsomatrPas encore d'évaluation
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrPas encore d'évaluation
- Conception: AjustementsDocument14 pagesConception: AjustementsomatrPas encore d'évaluation
- Les Assemblages Thermiques: La Soudure Sous Protection GazeuseDocument16 pagesLes Assemblages Thermiques: La Soudure Sous Protection Gazeuseomatr100% (1)
- Transmettre L'énergie: Etude Des MécanismesDocument30 pagesTransmettre L'énergie: Etude Des MécanismesomatrPas encore d'évaluation
- Cot at Ion MetroDocument80 pagesCot at Ion MetroMohamed SahilPas encore d'évaluation
- Problématique Comment Traiter Le Cas D'un Chargement de Type PalierDocument13 pagesProblématique Comment Traiter Le Cas D'un Chargement de Type PalieromatrPas encore d'évaluation
- Les Assemblages Thermiques: La Soudure Sous Protection GazeuseDocument16 pagesLes Assemblages Thermiques: La Soudure Sous Protection Gazeuseomatr100% (1)
- 513934Document19 pages513934omatrPas encore d'évaluation
- 01-Base Dessin Technique - Dessin D'ensembleDocument1 page01-Base Dessin Technique - Dessin D'ensembleSalah Eddine ChouikhPas encore d'évaluation
- Gprod Isp-IntroductionDocument28 pagesGprod Isp-IntroductionomatrPas encore d'évaluation
- Les Accouplements: 1-Leur RoleDocument6 pagesLes Accouplements: 1-Leur RoleomatrPas encore d'évaluation
- 31 EmbrayagesDocument12 pages31 EmbrayagesSimoMonkad100% (1)
- ACCOUPLEMENTDocument6 pagesACCOUPLEMENTMyr NahPas encore d'évaluation
- Introduction 1. METHODE DE REPRESENTATION Méthode. Dessin Industriel - Les Coupes Chapitre 2Document6 pagesIntroduction 1. METHODE DE REPRESENTATION Méthode. Dessin Industriel - Les Coupes Chapitre 2omatr100% (1)
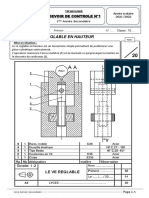
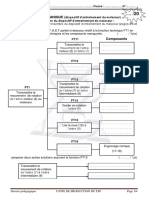
- 1ère Année Secondaire - Devoir de Contrôle N°1-2Document3 pages1ère Année Secondaire - Devoir de Contrôle N°1-2omatr100% (2)
- 4Document1 page4omatrPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDocument21 pages04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiPas encore d'évaluation
- DJE4394Document119 pagesDJE4394danPas encore d'évaluation
- PdM3 Guide Corrige Vrac Repros C4Document2 pagesPdM3 Guide Corrige Vrac Repros C4Eva BteichPas encore d'évaluation
- Cahier de Charge Du ProjetDocument4 pagesCahier de Charge Du ProjetMehdi KhaledPas encore d'évaluation
- Cours Lignes de Transmission Séance Adaptation D'impédance 2011 2012Document8 pagesCours Lignes de Transmission Séance Adaptation D'impédance 2011 2012benlamlihPas encore d'évaluation
- TD Regime de Neutre TTDocument4 pagesTD Regime de Neutre TTOlivier FLOHRPas encore d'évaluation
- 3 - Modeles de Markov CachesDocument34 pages3 - Modeles de Markov CachesWISSALPas encore d'évaluation
- TP 1Document1 pageTP 1djennati100% (1)
- GISEMENTDocument4 pagesGISEMENTTouré AbdoulPas encore d'évaluation
- Serco FDocument26 pagesSerco FRV PenrroiPas encore d'évaluation
- NF EN 1431 (Mai 2009)Document19 pagesNF EN 1431 (Mai 2009)Fatima BouhajaPas encore d'évaluation
- TD6 PhysiqueDocument4 pagesTD6 PhysiqueEric DeumoPas encore d'évaluation
- Rapport Optimisation Sur MatlabDocument13 pagesRapport Optimisation Sur MatlabLino YETONGNONPas encore d'évaluation
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- Poly JavaDocument176 pagesPoly JavaLeonzoConstantiniPas encore d'évaluation
- Exercices Chapitre 3 FractionsDocument3 pagesExercices Chapitre 3 FractionsTony GRACAPas encore d'évaluation
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- Cours ExcelDocument80 pagesCours ExcelLahcen Boufouss100% (1)
- Ajust ExpoDocument4 pagesAjust ExpoMme_Sos100% (1)
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- CC 1 Analyse Natalia Borbón TorresDocument3 pagesCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresPas encore d'évaluation
- Geometrie Pour Dao2 PDFDocument161 pagesGeometrie Pour Dao2 PDFlekouf43100% (1)
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)