Vous aimerez peut-être aussi
- Cours-intégrale-bac-SM - FFDocument23 pagesCours-intégrale-bac-SM - FFnhmeryPas encore d'évaluation
- Econometrie Exercices Corriges OptimizeDocument211 pagesEconometrie Exercices Corriges OptimizeDramane CoulibalyPas encore d'évaluation
- Machine Learning Avec Scikit-LearnDocument26 pagesMachine Learning Avec Scikit-LearnmaximinPas encore d'évaluation
- Corrigé Rattrapage Commande de Robot de Manipulation 2019Document2 pagesCorrigé Rattrapage Commande de Robot de Manipulation 2019zinebPas encore d'évaluation
- TD Fonctions en Python 2021Document3 pagesTD Fonctions en Python 2021KhalilGhenimiPas encore d'évaluation
- Logique Floue MemoDocument108 pagesLogique Floue Memofahd ghabiPas encore d'évaluation
- PISO Loops Description in OpenFOAMDocument7 pagesPISO Loops Description in OpenFOAMcypiii0% (1)
- Cours Physique Experimentale 2018 V5Document47 pagesCours Physique Experimentale 2018 V5eloijonathan0Pas encore d'évaluation
- UntitledDocument3 pagesUntitledYoussef El rHaziPas encore d'évaluation
- A2 OperateursDocument4 pagesA2 OperateursAchfakidine JaovitahermannPas encore d'évaluation
- Série 2 - calcul-vectoriel-TCS-FFDocument1 pageSérie 2 - calcul-vectoriel-TCS-FFtarik boubihiPas encore d'évaluation
- 6 Solution TD 6Document6 pages6 Solution TD 6Mohamed HaddadPas encore d'évaluation
- Corrige Type Emd - Rtse - 22 - FinalDocument11 pagesCorrige Type Emd - Rtse - 22 - Finaldelmimohamed9Pas encore d'évaluation
- Cours MMC-CHAPITRE 6 - Théorèmes Liés A Énergie +Document19 pagesCours MMC-CHAPITRE 6 - Théorèmes Liés A Énergie +Axel BekaertPas encore d'évaluation
- Corigé Type I-1 2018 - 2019Document4 pagesCorigé Type I-1 2018 - 2019eloijonathan0Pas encore d'évaluation
- Correction Td1sticl12022vfDocument9 pagesCorrection Td1sticl12022vfEmna BrahmiPas encore d'évaluation
- Correction de Série 4-Ensembles-TCSSDocument6 pagesCorrection de Série 4-Ensembles-TCSSZakaria EzziyadiPas encore d'évaluation
- Calcul IntégralDocument5 pagesCalcul IntégralMOHAMMED CHAMIPas encore d'évaluation
- Correction TD3Document8 pagesCorrection TD3nadinerjaibi15Pas encore d'évaluation
- Corrigé Exercice 9 TD Thermodynamique 2023Document3 pagesCorrigé Exercice 9 TD Thermodynamique 2023Ouédraogo Youssouf Ibn OusseniPas encore d'évaluation
- RESUME Fonction de Transfet - Filtres AnalogiquesDocument1 pageRESUME Fonction de Transfet - Filtres AnalogiquesFadwa GHANIPas encore d'évaluation
- Statistique Mathematique Serie D Exercices CorrigesDocument13 pagesStatistique Mathematique Serie D Exercices Corrigesthierry DPas encore d'évaluation
- Dipoles PC PrepaDocument2 pagesDipoles PC PrepaOnon Ekribo sostènePas encore d'évaluation
- Corrige Maths 2023Document2 pagesCorrige Maths 2023nicolaslecharmant12Pas encore d'évaluation
- 1 - IE1 Corrigé 1h45 06 10 2022 - Suites - EspaceDocument5 pages1 - IE1 Corrigé 1h45 06 10 2022 - Suites - EspaceJulian AllairePas encore d'évaluation
- Correction Exe Onde Section ScienceDocument13 pagesCorrection Exe Onde Section Sciencemohamed amine romdhanePas encore d'évaluation
- Chapitre 2Document6 pagesChapitre 2Taha Abd El OuahadPas encore d'évaluation
- Devoir Libre 11 (3apic)Document2 pagesDevoir Libre 11 (3apic)Sa MoPas encore d'évaluation
- 2nd Vecteurs Interrogation v2Document6 pages2nd Vecteurs Interrogation v2anissaPas encore d'évaluation
- Ensemble 2024Document1 pageEnsemble 2024fahymmohamed749Pas encore d'évaluation
- Résumé Barycentre 1bacDocument2 pagesRésumé Barycentre 1bacjilalixmcPas encore d'évaluation
- Série 2 - calcul-vectoriel-TCS-FFDocument1 pageSérie 2 - calcul-vectoriel-TCS-FFhmaimouanouar13Pas encore d'évaluation
- Serie Trig Tronc Comm FIFIDocument3 pagesSerie Trig Tronc Comm FIFIStitou SaadPas encore d'évaluation
- Corrigé - Série de T.D. N°1 Du TS 521Document5 pagesCorrigé - Série de T.D. N°1 Du TS 521Ryad SenhadjiPas encore d'évaluation
- 3e Cartes Mentales - CALCUL NUMERIQUEDocument3 pages3e Cartes Mentales - CALCUL NUMERIQUECéline François100% (1)
- Colle - 4 - CorrectionDocument7 pagesColle - 4 - CorrectionMarieme BoutraihPas encore d'évaluation
- Formulario VigaDocument1 pageFormulario VigaXimena Malagón AlcántarPas encore d'évaluation
- Correction TD Adhérence - Frottement PDFDocument9 pagesCorrection TD Adhérence - Frottement PDFSami BennourPas encore d'évaluation
- MQ Serie de Revision No 1 I Fi D 2015Document13 pagesMQ Serie de Revision No 1 I Fi D 2015Hadia HamzaPas encore d'évaluation
- TD Correction Torseur Cin Dyn PFD TecDocument22 pagesTD Correction Torseur Cin Dyn PFD TecSd instruPas encore d'évaluation
- M5 - Chapitre II - Cinématique Du SolideDocument13 pagesM5 - Chapitre II - Cinématique Du SolideMariona AutranPas encore d'évaluation
- MECA2 - Dynamique - TD2 - CorrectionDocument22 pagesMECA2 - Dynamique - TD2 - CorrectionAbo ImranPas encore d'évaluation
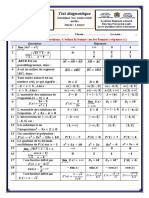
- Test Diagnostique-2bac SCDocument1 pageTest Diagnostique-2bac SCAbdelkbir MoradiPas encore d'évaluation
- Classes Préparatoires II / Semestre 4 / INSPEI / Abomey: Année Universitaire: 2018-2019Document1 pageClasses Préparatoires II / Semestre 4 / INSPEI / Abomey: Année Universitaire: 2018-2019Akadiri HonfoPas encore d'évaluation
- Découverte de La Somme de Vecteurs - INDIVIDUELDocument2 pagesDécouverte de La Somme de Vecteurs - INDIVIDUELB Y R A R E - H A E S H IPas encore d'évaluation
- Corrigé - TD 2Document2 pagesCorrigé - TD 2amiira bouzouadaPas encore d'évaluation
- Le Principe D Inertie Cours 4 1Document4 pagesLe Principe D Inertie Cours 4 1Jihad EL100% (1)
- Devoir 1 Modele 7 Mathematiques 3ac Semestre 2Document1 pageDevoir 1 Modele 7 Mathematiques 3ac Semestre 2Sa MoPas encore d'évaluation
- Ondes Progressives Le Long D Une CordeDocument2 pagesOndes Progressives Le Long D Une CordeYoussef DahaniPas encore d'évaluation
- ApplicationsDocument3 pagesApplicationsTresor AmehougaPas encore d'évaluation
- Correction TD Second OrdreDocument9 pagesCorrection TD Second Ordrerabhiw543Pas encore d'évaluation
- Let 52 Solution TD 5Document5 pagesLet 52 Solution TD 5Nadhira AdjPas encore d'évaluation
- Corrigé Examen PST - 10 Février 2022Document4 pagesCorrigé Examen PST - 10 Février 2022mayar mimiPas encore d'évaluation
- Chap2-2 - ELN PCE-REDMONOC-1920Document25 pagesChap2-2 - ELN PCE-REDMONOC-1920yannick TourePas encore d'évaluation
- Serie Energie de Def1Document9 pagesSerie Energie de Def1Bouchra AskriPas encore d'évaluation
- Complément Mathématiques Opérateurs DifférentielsDocument2 pagesComplément Mathématiques Opérateurs DifférentielsSohaib SfPas encore d'évaluation
- Complément Mathématiques Opérateurs DifférentielsDocument2 pagesComplément Mathématiques Opérateurs DifférentielsSohaib SFAIRIPas encore d'évaluation
- Chapitre 3 - Changement de RéférentielDocument10 pagesChapitre 3 - Changement de RéférentielHamza BoutlihPas encore d'évaluation
- Pendule Compte RenduDocument10 pagesPendule Compte RenduAhmed GAMING40% (5)
- Formule FIZIKA 1Document2 pagesFormule FIZIKA 1EmrahJusPas encore d'évaluation
- Cours Barycentre 1bacDocument7 pagesCours Barycentre 1bach.ezzhaniPas encore d'évaluation
- Devoir de Mécanique Des SolsDocument10 pagesDevoir de Mécanique Des SolsCosinus Thêta100% (1)
- 1S 05 DERIVATION M DM Dérivée Et tangente-CORRIGEDocument4 pages1S 05 DERIVATION M DM Dérivée Et tangente-CORRIGEnoraPas encore d'évaluation
- Cours 02-Dérivation-2-bac-BIOFDocument10 pagesCours 02-Dérivation-2-bac-BIOFabdellah faqdaniPas encore d'évaluation
- Premier Devoir 2020-2021 (Ciné-Dyna)Document2 pagesPremier Devoir 2020-2021 (Ciné-Dyna)eloijonathan0Pas encore d'évaluation
- Corigé Type I-1 2018 - 2019Document4 pagesCorigé Type I-1 2018 - 2019eloijonathan0Pas encore d'évaluation
- courcLangageC LicenceQL PDFDocument138 pagescourcLangageC LicenceQL PDFInnan AdamPas encore d'évaluation
- Premier Devoir (Ciné-Dyna)Document2 pagesPremier Devoir (Ciné-Dyna)eloijonathan0Pas encore d'évaluation
- Deuxième Devoir 2020-2021 CinématiqueDocument1 pageDeuxième Devoir 2020-2021 Cinématiqueeloijonathan0Pas encore d'évaluation
- Maths IIDocument72 pagesMaths IIeloijonathan0Pas encore d'évaluation
- Devoir ThermochimieDocument6 pagesDevoir Thermochimieeloijonathan0Pas encore d'évaluation
- Corrige Exam 1 H09Document11 pagesCorrige Exam 1 H09azzamPas encore d'évaluation
- TP4 Opt LeulmiDocument6 pagesTP4 Opt LeulmiMed ISslam LeulmiPas encore d'évaluation
- 2022-2023 TD0 Thermique LET2S3 LEEP2S3 LMI2S3 ENSPDocument2 pages2022-2023 TD0 Thermique LET2S3 LEEP2S3 LMI2S3 ENSPDoré NgohPas encore d'évaluation
- Diff Finies Vol Finis 2020Document2 pagesDiff Finies Vol Finis 2020Ishak KETTAFPas encore d'évaluation
- Automate CellulaireDocument20 pagesAutomate CellulaireAbrahamPas encore d'évaluation
- Tpn04 DiagDocument3 pagesTpn04 DiagAhmed Mehdi DALIPas encore d'évaluation
- 5 Simplexe Var BorneesDocument26 pages5 Simplexe Var BorneesMohamed El HajjamPas encore d'évaluation
- TD 2: Information Selon Shannon Et Codage Optimal: 1 Inégalité de Kraft (Suite)Document2 pagesTD 2: Information Selon Shannon Et Codage Optimal: 1 Inégalité de Kraft (Suite)Sãb ÎnePas encore d'évaluation
- Chapitre III TasDocument14 pagesChapitre III Tasjean5no5l5kangaPas encore d'évaluation
- Processus ARCH GARCH ApplicationsDocument85 pagesProcessus ARCH GARCH ApplicationskatakitoPas encore d'évaluation
- Ds 2Document4 pagesDs 2Naim HammamiPas encore d'évaluation
- Correction de Lexamen Blanc N°2Document5 pagesCorrection de Lexamen Blanc N°2Tanan NnenPas encore d'évaluation
- Cours Réduction RésuméDocument34 pagesCours Réduction Résuméenguerrandvauby2Pas encore d'évaluation
- Optiml3 PolyDocument53 pagesOptiml3 Polyghouti ghoutiPas encore d'évaluation
- Fouille Des Big Data Et Visualisation - Week 2Document47 pagesFouille Des Big Data Et Visualisation - Week 2souhail nahedPas encore d'évaluation
- Chap 3 EchantillonnageDocument5 pagesChap 3 EchantillonnageLynda BkrPas encore d'évaluation
- Us Se .: Synthèse de CorrecteursDocument35 pagesUs Se .: Synthèse de CorrecteursMohamed LiliPas encore d'évaluation
- Examen ENSTP 2014Document4 pagesExamen ENSTP 2014dz15dzPas encore d'évaluation
- Exercices SolutionsDocument18 pagesExercices SolutionsMohamed Ali ChebbiPas encore d'évaluation
- TP1-Economic DispatchDocument4 pagesTP1-Economic DispatchLylia ZennafPas encore d'évaluation
- Théorie Des JeuxDocument35 pagesThéorie Des JeuxIssam Dhahri100% (1)
- Én Polynômes Et Fractions RationnellesDocument4 pagesÉn Polynômes Et Fractions RationnellesLOUNDOU orthegaPas encore d'évaluation
- Tps Regression Machine LeraningDocument5 pagesTps Regression Machine Leraninggenta kojimaPas encore d'évaluation
- Correcteurs PIDDocument4 pagesCorrecteurs PIDFiras AguirPas encore d'évaluation
- CH 2 SlidesDocument53 pagesCH 2 SlidesAya Rayane DerrouichePas encore d'évaluation
- FonctionprocedureDocument18 pagesFonctionprocedurejonirax123Pas encore d'évaluation