Vous aimerez peut-être aussi
- Programmer ESP32Document18 pagesProgrammer ESP32Lamiss GhoulPas encore d'évaluation
- Feuille TageDocument18 pagesFeuille TageIr blaise alvine musua pasuPas encore d'évaluation
- Tahar-ALIMI Programmation Et Robotique IoTDocument15 pagesTahar-ALIMI Programmation Et Robotique IoTAnonymous rQyZjgRM100% (2)
- Fiche de ProjetDocument3 pagesFiche de ProjetWalid BOUAZIZPas encore d'évaluation
- TP 1 Année RobotiqueDocument3 pagesTP 1 Année RobotiquePROF PROFPas encore d'évaluation
- Arduino #23 - Générateur PWM - Méthode 1Document15 pagesArduino #23 - Générateur PWM - Méthode 1Lassaad LassaadPas encore d'évaluation
- Arduino Cours 2016Document44 pagesArduino Cours 2016Julio Ratovonkery100% (1)
- FP YOKI01 kitVaetVientDocument5 pagesFP YOKI01 kitVaetVientEvan PecherPas encore d'évaluation
- Tp1 Robotique 21-22-1 AnneeDocument9 pagesTp1 Robotique 21-22-1 Anneesghaier anouarPas encore d'évaluation
- Notices - Notice Telerupteur Radio MTR2000ERDocument5 pagesNotices - Notice Telerupteur Radio MTR2000ERPascal SobczykPas encore d'évaluation
- Rapport Finals Er Rue Code eDocument29 pagesRapport Finals Er Rue Code ezineb kadiriPas encore d'évaluation
- TIPE Riu Capteurs PiézoélectriquesDocument20 pagesTIPE Riu Capteurs PiézoélectriquesSouad JazoulyPas encore d'évaluation
- Notice Legrand Programmation Radion Legrand Sans FilDocument32 pagesNotice Legrand Programmation Radion Legrand Sans Filtdood88pp3hqghcxgPas encore d'évaluation
- Tp1: Led Clignotante (Blink) : A. ObjectifDocument7 pagesTp1: Led Clignotante (Blink) : A. ObjectifhoudaPas encore d'évaluation
- Réalisation D'un - Tracker - Solaire À L'aide D'arduino - PybarDocument10 pagesRéalisation D'un - Tracker - Solaire À L'aide D'arduino - Pybarfehmi001Pas encore d'évaluation
- Robotique Partie3Document2 pagesRobotique Partie3ginaPas encore d'évaluation
- Mini Projet - Etape 2Document6 pagesMini Projet - Etape 2vjvxg6fcbqPas encore d'évaluation
- Electronique Avec Arduino - ImpressionDocument107 pagesElectronique Avec Arduino - ImpressionprincePas encore d'évaluation
- TD Electronique Et Arduino 2018-2019Document22 pagesTD Electronique Et Arduino 2018-2019Abdel HassibPas encore d'évaluation
- Mini Projet EclairageDocument3 pagesMini Projet EclairageNeiville AgbrPas encore d'évaluation
- TD1La Centralisation Des CommandesDocument4 pagesTD1La Centralisation Des CommandesHichem GuedriPas encore d'évaluation
- Université Sidi Mohammed Ben AbdillahDocument12 pagesUniversité Sidi Mohammed Ben AbdillahAyman LamzouriPas encore d'évaluation
- TP Acquisition1Document9 pagesTP Acquisition1Ossama ChahoubPas encore d'évaluation
- 1sequence Mbot Capteurs-1-3Document7 pages1sequence Mbot Capteurs-1-3Jessica ThuilliezPas encore d'évaluation
- Atelier 1 - ESP 32Document30 pagesAtelier 1 - ESP 32chouaib.medPas encore d'évaluation
- Débuter Avec Les Led Sur Arduino. Piloter, Faire Varier L'intensité LED, Led RGBDocument10 pagesDébuter Avec Les Led Sur Arduino. Piloter, Faire Varier L'intensité LED, Led RGBAdel FehriPas encore d'évaluation
- Rapport ThermocoupleDocument19 pagesRapport ThermocoupleAmiNe JraifPas encore d'évaluation
- STR - TP-1 - Travaux PratiquesDocument12 pagesSTR - TP-1 - Travaux Pratiquesfellah baha eddinePas encore d'évaluation
- Cours 1Document56 pagesCours 1ElMegoPas encore d'évaluation
- Tp1.2.3.lpa. 2024Document4 pagesTp1.2.3.lpa. 2024sihamarbaz14Pas encore d'évaluation
- ARDUINO-Capteurs de Température LM35 Et DHT22Document7 pagesARDUINO-Capteurs de Température LM35 Et DHT22ramdanePas encore d'évaluation
- Le Capteur LM35Document7 pagesLe Capteur LM35HazarPas encore d'évaluation
- Devoir NewDocument22 pagesDevoir NewrachellaebonguePas encore d'évaluation
- 1 2010 Ann Stic Aut 10Document47 pages1 2010 Ann Stic Aut 10Njato Richard Tizi OuzouPas encore d'évaluation
- Dossier Technique VERITAS R8+Document29 pagesDossier Technique VERITAS R8+Noor Ait-kaciPas encore d'évaluation
- Projet -D_tecteur de gazDocument2 pagesProjet -D_tecteur de gazmedaziz8020Pas encore d'évaluation
- TP IotDocument32 pagesTP IotL'Anger لنڨرPas encore d'évaluation
- Système D'alarme Anti-IntrusionDocument13 pagesSystème D'alarme Anti-IntrusionŚõűmä Ąsmã Ĥm100% (2)
- tp1 Reseaux Des Capteurs-ConvertiDocument5 pagestp1 Reseaux Des Capteurs-ConvertiRaed SassiPas encore d'évaluation
- projet Iot Cours (1)Document26 pagesprojet Iot Cours (1)feriel ben frijaPas encore d'évaluation
- 2023 DS3 2asDocument7 pages2023 DS3 2asSaber MaalaouiPas encore d'évaluation
- TP N°1: Un Feu Tricolore: Partie 3: L'énergie Et Ses ConversionsDocument7 pagesTP N°1: Un Feu Tricolore: Partie 3: L'énergie Et Ses ConversionsMaro gamPas encore d'évaluation
- Rapport Electronique TRDocument11 pagesRapport Electronique TRØmãx Õmär ÄsrîPas encore d'évaluation
- Installation de La Carte CAPAX-Xtd®: WWW - Infoconsult.tnDocument7 pagesInstallation de La Carte CAPAX-Xtd®: WWW - Infoconsult.tnSalah SalhiPas encore d'évaluation
- Formation Programmation Arduino Cours 4 PDFDocument58 pagesFormation Programmation Arduino Cours 4 PDFKeddrick Reynolds100% (1)
- Série 1 Réflexion - Réfraction 20 21Document10 pagesSérie 1 Réflexion - Réfraction 20 21Bennani GhaliPas encore d'évaluation
- Rapport TP Mesure 2017 2018Document10 pagesRapport TP Mesure 2017 2018Issa Baba OuedraogoPas encore d'évaluation
- Mblock ArduinoDocument23 pagesMblock ArduinoMohamed Amine MnassriPas encore d'évaluation
- Robotique 1Document22 pagesRobotique 1chedi saidiPas encore d'évaluation
- Tp5 Generation Produit Convolution Signaux Discrets PDFDocument9 pagesTp5 Generation Produit Convolution Signaux Discrets PDFmrd9991Pas encore d'évaluation
- MicrocontrôleursDocument16 pagesMicrocontrôleursMouhcine Ben MoussaPas encore d'évaluation
- TP3 Amplificateur 2 EtagesDocument3 pagesTP3 Amplificateur 2 EtagesAnonymous p9zUfpJbPas encore d'évaluation
- TransistorDocument7 pagesTransistorAMEWOUAMEPas encore d'évaluation
- Mode-MS120-FRDocument12 pagesMode-MS120-FRRudy Carlier FeumbaPas encore d'évaluation
- TP 2Document1 pageTP 2achscribdachPas encore d'évaluation
- Chap 2 RedresseurDocument27 pagesChap 2 RedresseurAli HamdounePas encore d'évaluation
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- Arduino Pas à pas: Le guide ultime du débutant avec les bases du matériel, du logiciel, de la programmation et des projetsD'EverandArduino Pas à pas: Le guide ultime du débutant avec les bases du matériel, du logiciel, de la programmation et des projetsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Outils Et IdentitéDocument8 pagesOutils Et IdentitéLamiss GhoulPas encore d'évaluation
- Cocher Les Objets Connectés: Nom & PrénomDocument2 pagesCocher Les Objets Connectés: Nom & PrénomLamiss GhoulPas encore d'évaluation
- Devoir de Synthèse1 9b4g12 Dec2022Document4 pagesDevoir de Synthèse1 9b4g12 Dec2022Lamiss Ghoul100% (1)
- Série N°3-SD-Scond-SRep - 2SIDocument2 pagesSérie N°3-SD-Scond-SRep - 2SILamiss GhoulPas encore d'évaluation
- Devoir Synthèse 1 9ème3 2022 2023Document2 pagesDevoir Synthèse 1 9ème3 2022 2023Lamiss GhoulPas encore d'évaluation
- A RetenirDocument1 pageA RetenirLamiss GhoulPas encore d'évaluation
- Technologies InternetDocument2 pagesTechnologies InternetLamiss GhoulPas encore d'évaluation
- Devoir de Synthèse N°2 Makecode MicrobitDocument2 pagesDevoir de Synthèse N°2 Makecode MicrobitLamiss GhoulPas encore d'évaluation
- Devoir de Synthse N°1 2023 AliDocument6 pagesDevoir de Synthse N°1 2023 AliLamiss GhoulPas encore d'évaluation
- Devoir de Synthse N°1 2023 AliDocument6 pagesDevoir de Synthse N°1 2023 AliLamiss GhoulPas encore d'évaluation
- Test Dévaluation N°2 Pratique Et Exercice 8eme ScratchDocument11 pagesTest Dévaluation N°2 Pratique Et Exercice 8eme ScratchLamiss Ghoul100% (1)
- Controle3 Pour 2ème SCDocument1 pageControle3 Pour 2ème SCLamiss GhoulPas encore d'évaluation
- Dc1appinventor 2023Document3 pagesDc1appinventor 2023Lamiss Ghoul100% (1)
- REV008Document193 pagesREV008Lamiss GhoulPas encore d'évaluation
- Devoir de Synthèse N°2 Makecode MicrobitDocument2 pagesDevoir de Synthèse N°2 Makecode MicrobitLamiss GhoulPas encore d'évaluation
- Exercice N°02: (15 PTS)Document2 pagesExercice N°02: (15 PTS)Lamiss GhoulPas encore d'évaluation
- DS20Document2 pagesDS20Lamiss GhoulPas encore d'évaluation
- Fiche 1 ElectriciteDocument2 pagesFiche 1 ElectriciteLamiss GhoulPas encore d'évaluation
- Cours - 1ere - Annee Secondaire-Sciences - SVT-mode de Multiplication Des VGDocument5 pagesCours - 1ere - Annee Secondaire-Sciences - SVT-mode de Multiplication Des VGLamiss GhoulPas encore d'évaluation
- DS1.Objet CommunicantDocument2 pagesDS1.Objet CommunicantLamiss GhoulPas encore d'évaluation
- Mini Projet4 PythonDocument1 pageMini Projet4 Pythoninformatiquehageryahoo.frPas encore d'évaluation
- Ds 1Document5 pagesDs 1Lamiss GhoulPas encore d'évaluation
- Devoir de Synthèse N°1 - ScientifiqueDocument3 pagesDevoir de Synthèse N°1 - ScientifiqueLamiss GhoulPas encore d'évaluation
- Equilibre D Un Solide Soumis A Deux Forces Exercices Corriges 2Document1 pageEquilibre D Un Solide Soumis A Deux Forces Exercices Corriges 2mbiscou83Pas encore d'évaluation
- Evaluation 3Document3 pagesEvaluation 3Lamiss GhoulPas encore d'évaluation
- Tutoriel Flash Esp32 FirmwareDocument4 pagesTutoriel Flash Esp32 FirmwareLamiss GhoulPas encore d'évaluation
- DC1 2023Document5 pagesDC1 2023Lamiss GhoulPas encore d'évaluation
- ds2 2scDocument3 pagesds2 2scLamiss GhoulPas encore d'évaluation
- Les Objets CommunicantsDocument23 pagesLes Objets CommunicantsLamiss GhoulPas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation
- PDFDocument24 pagesPDFCompétitionPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- Composition Et Correction Français 1AP T2Document4 pagesComposition Et Correction Français 1AP T2Boud Aek100% (1)
- 1sm G Fonction Ex SeulDocument5 pages1sm G Fonction Ex SeulSouhail El AsferPas encore d'évaluation
- Soukhoï Su-57 - WikipédiaDocument10 pagesSoukhoï Su-57 - WikipédiaMohamed Lamine TourePas encore d'évaluation
- Act2 1Document4 pagesAct2 1nassima ghallabiPas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- AFAM - Projet de RechercheDocument23 pagesAFAM - Projet de RechercheAlbert Francis Abega MekongoPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- Chauffeur SPLDocument1 pageChauffeur SPLmeryem.vfsPas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- Chimie QuantiqueDocument5 pagesChimie Quantiquedavinccicode100% (1)
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- Facteur de PuissanceDocument9 pagesFacteur de PuissancesonoumoudjibouPas encore d'évaluation
- ToyotismeDocument4 pagesToyotismeAbdelkarimPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Enquête de Fréquentation Culturelle 2015 PDFDocument35 pagesEnquête de Fréquentation Culturelle 2015 PDFilikesummer1234Pas encore d'évaluation
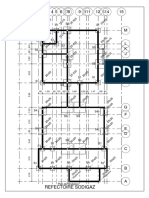
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- Item 362 - AesDocument4 pagesItem 362 - AesSofia RhellabPas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- Catalogue PHOTOFLEX en FrancaisDocument26 pagesCatalogue PHOTOFLEX en FrancaisAllanlitwinPas encore d'évaluation