Vous aimerez peut-être aussi
- Exercices Corriges Espaces VectorielsDocument27 pagesExercices Corriges Espaces VectorielsSouzi Mer77% (30)
- TP 1: Introduction À L'Utilisation Du Logiciel Freefem++ Equation de La Chaleur 1D: Méthode Des Différences FiniesDocument3 pagesTP 1: Introduction À L'Utilisation Du Logiciel Freefem++ Equation de La Chaleur 1D: Méthode Des Différences FiniesÏbrähïmä CöndëPas encore d'évaluation
- Chapitre 2Document4 pagesChapitre 2Nassim MillanoPas encore d'évaluation
- Sujet Corrige EF FVC 17-18Document4 pagesSujet Corrige EF FVC 17-18Ima NePas encore d'évaluation
- UntitledDocument8 pagesUntitledHouho DzPas encore d'évaluation
- Mise en PratiqueDocument26 pagesMise en PratiqueKodjo AMOUZOUPas encore d'évaluation
- Analyse Numerique Les Reponses Doivent Etre EnvoyDocument3 pagesAnalyse Numerique Les Reponses Doivent Etre EnvoyDjamila BENYOUCEFPas encore d'évaluation
- Exotype 13Document4 pagesExotype 13issa issoPas encore d'évaluation
- TD EdpDocument7 pagesTD Edpbenmehel abdelkrim100% (3)
- TD3 2011Document3 pagesTD3 2011Badreddine EssaidiPas encore d'évaluation
- TD Analyse NumériqueDocument12 pagesTD Analyse NumériqueSeif-eddine CheliliPas encore d'évaluation
- UTC EL NF04 Session AUTOMNE PDFDocument2 pagesUTC EL NF04 Session AUTOMNE PDFHanen BerririPas encore d'évaluation
- Devoir À La Maisoncorrigé DétailléDocument20 pagesDevoir À La Maisoncorrigé DétailléLolita zwinaPas encore d'évaluation
- Exo22 Matrices PDFDocument1 pageExo22 Matrices PDFJasser Hachaichi100% (1)
- Outils MathDocument8 pagesOutils MathZoratoon OlPas encore d'évaluation
- Equations de La Physique math-TD3-L3Document1 pageEquations de La Physique math-TD3-L3Safae El YounsiPas encore d'évaluation
- Bachotage Diocésain 2021Document2 pagesBachotage Diocésain 2021Mauhutin Ambroise AMOUSSOUPas encore d'évaluation
- CorrigéExamAnaComplexe2018 2019Document4 pagesCorrigéExamAnaComplexe2018 2019Ali brahim MahamatPas encore d'évaluation
- Atelier SuitesDocument8 pagesAtelier SuitesLilly Hope MiliPas encore d'évaluation
- Correction Ex Cercle-1Document2 pagesCorrection Ex Cercle-1Chaymae hamamouchPas encore d'évaluation
- Correct If S 109Document59 pagesCorrect If S 109andoPas encore d'évaluation
- Cour3 ENSEMDocument17 pagesCour3 ENSEMKhadija BousbaiatPas encore d'évaluation
- Correction ProDocument154 pagesCorrection ProAlexandro cocouviPas encore d'évaluation
- Simili 2024Document3 pagesSimili 2024meryem ait addi100% (1)
- CC Edp Ing Nov2021 CorDocument3 pagesCC Edp Ing Nov2021 Cordilanho takamPas encore d'évaluation
- Corrige Du Concours D'Admission 1999 Ecole Polytechnique Deuxieme Composition de MathematiquesDocument4 pagesCorrige Du Concours D'Admission 1999 Ecole Polytechnique Deuxieme Composition de MathematiquesXander HrPas encore d'évaluation
- Diff Finies Serie Exer 2019 20Document8 pagesDiff Finies Serie Exer 2019 20Ishak KETTAFPas encore d'évaluation
- CC Edp Ing Dec2021 RatDocument3 pagesCC Edp Ing Dec2021 RatManuel Christopher Chena MonkamPas encore d'évaluation
- Caract SLRDocument2 pagesCaract SLRMiloudi1245 CdasdPas encore d'évaluation
- MEC6210 Devoir 2Document3 pagesMEC6210 Devoir 2Emery MougangPas encore d'évaluation
- Sol Exos ch6-5Document7 pagesSol Exos ch6-5Septimus PierrePas encore d'évaluation
- Reduction 6 Enonces + CorrigeDocument30 pagesReduction 6 Enonces + Corrigem0lcKy best playerPas encore d'évaluation
- Exercices An NumDocument10 pagesExercices An Numbennaysanae6Pas encore d'évaluation
- TD4 SolutionDocument7 pagesTD4 SolutionRIAD POK TVPas encore d'évaluation
- tp06 Eq-LaplaceDocument6 pagestp06 Eq-LaplacedonaldmanuhounsaPas encore d'évaluation
- DS03 Equationsdifferentielles Somme Recurrence ReelsDocument6 pagesDS03 Equationsdifferentielles Somme Recurrence ReelsYoan MboutsouPas encore d'évaluation
- Exercices Degead PDFDocument12 pagesExercices Degead PDFCheick SoumahoroPas encore d'évaluation
- Ec1 15-16Document6 pagesEc1 15-16AliBenMessaoudPas encore d'évaluation
- Ex 2Document3 pagesEx 2Xan DutheilPas encore d'évaluation
- Devoir de Synthèse N°1 - Math - Bac Sciences Exp (2015-2016) MR S-SOLA PDFDocument2 pagesDevoir de Synthèse N°1 - Math - Bac Sciences Exp (2015-2016) MR S-SOLA PDFGhassen Benjannet100% (1)
- Ana 15Document22 pagesAna 15Smail RCAPas encore d'évaluation
- Fax GéométrieDocument6 pagesFax Géométrie14maelstormxPas encore d'évaluation
- MAT4112 Solution v2007Document75 pagesMAT4112 Solution v2007Stanislas SnakermanPas encore d'évaluation
- Feuille de Revision: A 11 A 33 (100) Puis Donner Les Deux Derniers Chiffres de ADocument2 pagesFeuille de Revision: A 11 A 33 (100) Puis Donner Les Deux Derniers Chiffres de AbadrPas encore d'évaluation
- Resolution Numerique de L Equation de La Chaleur en 2D PDFDocument14 pagesResolution Numerique de L Equation de La Chaleur en 2D PDFRedaPas encore d'évaluation
- Corrige Maths Bce Edhec 2020Document8 pagesCorrige Maths Bce Edhec 2020Diomande WilfriedPas encore d'évaluation
- BAC TSExp MATH 2020 CorrectionDocument12 pagesBAC TSExp MATH 2020 CorrectionAdama BagayokoPas encore d'évaluation
- 1 Problème À Valeurs Aux Limites: 1.1 Différences Finies CentréesDocument5 pages1 Problème À Valeurs Aux Limites: 1.1 Différences Finies Centréesa.seghirPas encore d'évaluation
- Map567 PC5Document2 pagesMap567 PC5El jaouhary MohammedPas encore d'évaluation
- MAT265 TableDerivees MBDocument1 pageMAT265 TableDerivees MBothmane.karamat.1Pas encore d'évaluation
- S ERIE 3 de M.Econom EtriquesDocument3 pagesS ERIE 3 de M.Econom EtriquesAmine StiouniPas encore d'évaluation
- TD 1Document4 pagesTD 1Thierry Gnasiri Godwe HinsouPas encore d'évaluation
- DS01 ECG1 2022 2023 Rentree CorDocument3 pagesDS01 ECG1 2022 2023 Rentree Corrolandanasse5Pas encore d'évaluation
- Exam 2 H11Document7 pagesExam 2 H11shylamoPas encore d'évaluation
- Sujet de Maths Bac D 2016Document3 pagesSujet de Maths Bac D 2016GuissePas encore d'évaluation
- Géom Aout 06Document1 pageGéom Aout 06Antonin CartiauxPas encore d'évaluation
- Integration Et Primitive Corrige Devoir 1Document3 pagesIntegration Et Primitive Corrige Devoir 1حمزة أسد اللهPas encore d'évaluation
- Corr Xmen mth222 1718 nv-4Document4 pagesCorr Xmen mth222 1718 nv-4Mazama-Esso Moddoh OclooPas encore d'évaluation
- FinalDocument10 pagesFinalomarsahraoui240Pas encore d'évaluation
- Controle 1Document2 pagesControle 1abdellah faqdaniPas encore d'évaluation
- LagrangeDocument2 pagesLagrangeselmaaaab2703Pas encore d'évaluation
- PB RecDocument2 pagesPB Recselmaaaab2703Pas encore d'évaluation
- Exercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTDocument2 pagesExercice (Etude D'Un Asservissement Échantillonné) .: NT CNTMNTselmaaaab2703Pas encore d'évaluation
- Seecs S2 Exam 1Document1 pageSeecs S2 Exam 1selmaaaab2703Pas encore d'évaluation
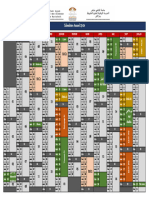
- Calendrier 23-24Document1 pageCalendrier 23-24selmaaaab2703Pas encore d'évaluation
- ObjetDocument1 pageObjetselmaaaab2703Pas encore d'évaluation
- Projet de La DrogueDocument5 pagesProjet de La Drogueselmaaaab2703Pas encore d'évaluation
- Calcul DifférentielDocument46 pagesCalcul DifférentielTunENSTABPas encore d'évaluation
- Intervalles Et Valeur AbsolueDocument5 pagesIntervalles Et Valeur AbsolueSarahPas encore d'évaluation
- N Corrigé de L Examen Blanc Lasse de Remière: Partie BDocument8 pagesN Corrigé de L Examen Blanc Lasse de Remière: Partie BAtputharajah LianaPas encore d'évaluation
- Devoir 2 Modele 5 20Document1 pageDevoir 2 Modele 5 20YUKIPas encore d'évaluation
- Séries D - Exercicesproduit Scalaire1BAC International - FR - Dr. Karam OuharouDocument3 pagesSéries D - Exercicesproduit Scalaire1BAC International - FR - Dr. Karam OuharouKaram OUHAROUPas encore d'évaluation
- MATH03Document5 pagesMATH03All AhmeDciaPas encore d'évaluation
- Suites Prep DS1Document4 pagesSuites Prep DS1mùùPas encore d'évaluation
- 1 Ds TrigoDocument2 pages1 Ds TrigoAYPALPas encore d'évaluation
- 2nde (COURS) Vecteurs Géométrie-AIS-2023Document4 pages2nde (COURS) Vecteurs Géométrie-AIS-2023smmagencydeyrieuxPas encore d'évaluation
- Tle A4 Seq 4 LYBIMOLDocument2 pagesTle A4 Seq 4 LYBIMOLJOEL LOICPas encore d'évaluation
- Systemes DifferentielsDocument12 pagesSystemes Differentielsenatt2012Pas encore d'évaluation
- Cours - Espaces Vectoriels de Dimension FinieDocument0 pageCours - Espaces Vectoriels de Dimension FinieYoussef HjiraPas encore d'évaluation
- 04 SeriesDocument14 pages04 SeriesProfchaari SciencesPas encore d'évaluation
- DST2 2012cDocument11 pagesDST2 2012cyouness hidaPas encore d'évaluation
- Serie D'exo ReparageDocument2 pagesSerie D'exo ReparageMoussa dialloPas encore d'évaluation
- TP 0Document7 pagesTP 0Hicham AtatriPas encore d'évaluation
- Mouvement Brownien Et Calcul StochastiqueDocument24 pagesMouvement Brownien Et Calcul StochastiqueGharsalliPas encore d'évaluation
- Devoir de Contrôle N°1 2011 2012 (Omar Elkalchani)Document2 pagesDevoir de Contrôle N°1 2011 2012 (Omar Elkalchani)Monji SaiemPas encore d'évaluation
- ANA2 L2 Papier 2Document15 pagesANA2 L2 Papier 2Ismael IsmaelPas encore d'évaluation
- Introduction À L'histoire de L'algèbre, D' Al-Khwârizmî À DescartesDocument15 pagesIntroduction À L'histoire de L'algèbre, D' Al-Khwârizmî À DescartesMalak BENAOUDIAPas encore d'évaluation
- M 03 CP 1 eDocument3 pagesM 03 CP 1 eanon-819597Pas encore d'évaluation
- Matlab ImagesDocument10 pagesMatlab ImagesNada KoyaPas encore d'évaluation
- Slides EDP Sol ClasDocument64 pagesSlides EDP Sol ClasridhajamelPas encore d'évaluation
- Exr 2 CPI 21Document1 pageExr 2 CPI 21Soulaiman AndahmouPas encore d'évaluation
- Cours de Math Pour Economistes - 240212 - 133852Document42 pagesCours de Math Pour Economistes - 240212 - 133852Kossivi Jean Dominique KOKOROKOPas encore d'évaluation
- 12 Suites Series Fonctions Planche CorrigesDocument14 pages12 Suites Series Fonctions Planche Corrigesjd jsPas encore d'évaluation
- 20 CombiDocument12 pages20 CombiBouba RedaPas encore d'évaluation
- SuitesDocument2 pagesSuitesKAWTAR100% (1)