Vous aimerez peut-être aussi
- Langages Informatiques: Analyse Syntaxique Et TraductionDocument353 pagesLangages Informatiques: Analyse Syntaxique Et TraductionHatem El MejriPas encore d'évaluation
- Omnivista 8770 Network Management System Datasheet FRDocument2 pagesOmnivista 8770 Network Management System Datasheet FRblackmamba etti jeanPas encore d'évaluation
- Sujet Corrige CC AnalyseNumerique1Document3 pagesSujet Corrige CC AnalyseNumerique1Ahmed Rabii100% (1)
- Lecon 6 Exercices CorrigesDocument10 pagesLecon 6 Exercices Corrigesik0302303Pas encore d'évaluation
- Exercices Calcul Integral CorrigesDocument57 pagesExercices Calcul Integral CorrigesSaid Gf100% (2)
- Exercices D'intégrale Et D'équation DifférentielsDocument14 pagesExercices D'intégrale Et D'équation DifférentielsETUSUP100% (1)
- Université de La Réunion/Faculté de Droit Et D'économie L1 Economie, Semestre 2Document5 pagesUniversité de La Réunion/Faculté de Droit Et D'économie L1 Economie, Semestre 2shab.kass4246Pas encore d'évaluation
- Exercices D'analyse II Notoppo DifficiliDocument43 pagesExercices D'analyse II Notoppo DifficiliSergio Denti100% (1)
- Controle1 Analyse3Document2 pagesControle1 Analyse3Ayoub MoustaouliPas encore d'évaluation
- TD04 Interpol Approx Zwin EnsamDocument14 pagesTD04 Interpol Approx Zwin Ensammouniax3Pas encore d'évaluation
- ISEEco 2010 CDocument17 pagesISEEco 2010 CGeddy Steeven Ndoko SouamounouPas encore d'évaluation
- Correction Exercices DLs 1Document9 pagesCorrection Exercices DLs 1Saiid RiadhPas encore d'évaluation
- Exercice Newton Et Spline CubiqueDocument12 pagesExercice Newton Et Spline CubiqueHoussam HaddaniPas encore d'évaluation
- Analyse Numérique Exercices InterpolationDocument3 pagesAnalyse Numérique Exercices Interpolationanibelsoul100% (1)
- ISEEco 2010 CDocument17 pagesISEEco 2010 CDedjima MamamPas encore d'évaluation
- TD3an3 - MIP - 2020-2021 - CorrigéDocument6 pagesTD3an3 - MIP - 2020-2021 - CorrigéUNESSTIFPas encore d'évaluation
- Dérivées PartiellesDocument6 pagesDérivées PartiellesLim ChhiKhiengPas encore d'évaluation
- Mathématiques 2 AnalyseDocument12 pagesMathématiques 2 Analyseseif eddine AbadaPas encore d'évaluation
- Série TD1 Analyse 3Document2 pagesSérie TD1 Analyse 3djihane.nedjarPas encore d'évaluation
- Chapitre 2 - SNL - Plan de PhaseDocument9 pagesChapitre 2 - SNL - Plan de PhaseFe ThiPas encore d'évaluation
- 1S DS Commun CDocument3 pages1S DS Commun Cmarc.lagier2Pas encore d'évaluation
- Série 2 Et SolutionDocument7 pagesSérie 2 Et Solutionayoub benaliPas encore d'évaluation
- Corrige Maths S 05Document4 pagesCorrige Maths S 05Fouzia BadiPas encore d'évaluation
- Examen Septembre C 1 PDFDocument5 pagesExamen Septembre C 1 PDFBoukalmoune IbrahimPas encore d'évaluation
- ISEEco 2000 CDocument11 pagesISEEco 2000 CST G-dyPas encore d'évaluation
- Cours AUT AS M1 SNL PDFDocument12 pagesCours AUT AS M1 SNL PDFChaouki MessasmaPas encore d'évaluation
- DS4201920201M3 CorrectionDocument2 pagesDS4201920201M3 Correctionmelissa azrouPas encore d'évaluation
- DS1 CorDocument13 pagesDS1 CorOlivier PamePas encore d'évaluation
- Série TD1 Analyse 3Document2 pagesSérie TD1 Analyse 3KIAS DjahidPas encore d'évaluation
- All Lim ContinuiteDocument4 pagesAll Lim ContinuitetorkitaherPas encore d'évaluation
- 08 Exos Correction Integration Primitives PDFDocument12 pages08 Exos Correction Integration Primitives PDFMourad Mouradbensalem67% (3)
- Chap3-1 Fonctions de 2 Ou 3 Variables (Limite-Continuité-Dérivabilité)Document3 pagesChap3-1 Fonctions de 2 Ou 3 Variables (Limite-Continuité-Dérivabilité)El Bachir EssahouliPas encore d'évaluation
- CorrectionDocument2 pagesCorrectionbrakwisPas encore d'évaluation
- Master 1 - Correction - Examen2022Document2 pagesMaster 1 - Correction - Examen2022Yarin AmounaPas encore d'évaluation
- 11 12 Exo Rattrapage l3 MassDocument12 pages11 12 Exo Rattrapage l3 MassPaul MulumbaPas encore d'évaluation
- Exercices Calcul Integral CorrigesDocument42 pagesExercices Calcul Integral CorrigesCrédit Finance PlusPas encore d'évaluation
- 2 - Interpolation Spline: J-P CroisilleDocument32 pages2 - Interpolation Spline: J-P CroisilleBekraoui KeltoumPas encore d'évaluation
- MN TP3 PDFDocument4 pagesMN TP3 PDFlasri lasriPas encore d'évaluation
- Devoir SurvilléDocument4 pagesDevoir SurvilléHadjadj HadjadjPas encore d'évaluation
- 04 TS Log Expo CorrigesDocument11 pages04 TS Log Expo CorrigesManizan Emmanuel YaoPas encore d'évaluation
- Correction TD 8Document16 pagesCorrection TD 8stevy darel100% (2)
- Devoir Commun Math 3 Lycee Jacques Prevert CorrigeDocument3 pagesDevoir Commun Math 3 Lycee Jacques Prevert CorrigeSaikou Oumar BarryPas encore d'évaluation
- Exam1c13 2 PDFDocument5 pagesExam1c13 2 PDFSeptimus PierrePas encore d'évaluation
- ISEEco 2002 CDocument13 pagesISEEco 2002 CST G-dyPas encore d'évaluation
- 02 1S Algebre CorrectionDocument7 pages02 1S Algebre CorrectionChantal MariamaPas encore d'évaluation
- Baca2002 PBCDocument3 pagesBaca2002 PBCSehenoandrianah RandrianjafyPas encore d'évaluation
- TS FicheBac03 DerivationDocument10 pagesTS FicheBac03 DerivationrivaltzPas encore d'évaluation
- Correction Maths BacD 2010Document9 pagesCorrection Maths BacD 2010Coul Adamo100% (1)
- Corrigé SérieTD1Document7 pagesCorrigé SérieTD1khaoula ajlanePas encore d'évaluation
- Limite Sex Os Corrige SDocument18 pagesLimite Sex Os Corrige SAzz IzzPas encore d'évaluation
- Corrigé SérieTD1Document7 pagesCorrigé SérieTD1KHAOULA AJLANEPas encore d'évaluation
- TD2 Corrigé PDFDocument5 pagesTD2 Corrigé PDFfrekchPas encore d'évaluation
- Mc2exercicesetexamens08 PDFDocument48 pagesMc2exercicesetexamens08 PDFMohamed ArabPas encore d'évaluation
- Contrôle Continu Danalyse 1Document1 pageContrôle Continu Danalyse 1Nidhal CherratPas encore d'évaluation
- TD 2Document6 pagesTD 2Karray omaymaPas encore d'évaluation
- Examen8 Analyse 4 SMA3Document5 pagesExamen8 Analyse 4 SMA3Tizirii AdouamaPas encore d'évaluation
- TD10Document2 pagesTD10Iñ SafPas encore d'évaluation
- Equationsexponentielles EXOSCORRIGESDocument3 pagesEquationsexponentielles EXOSCORRIGESVasanthkumar DjeacoumaranePas encore d'évaluation
- ISE Eco-2023 CorrigesDocument18 pagesISE Eco-2023 CorrigesZie souleymane Kone100% (1)
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Colas JKSNKNXDSDocument1 pageColas JKSNKNXDSCharaf Eddine ElinaniPas encore d'évaluation
- Haiteur Des Sables HSVDocument2 pagesHaiteur Des Sables HSVCharaf Eddine ElinaniPas encore d'évaluation
- Colas JKSNKNXDSDocument1 pageColas JKSNKNXDSCharaf Eddine ElinaniPas encore d'évaluation
- GRFGDHDocument12 pagesGRFGDHCharaf Eddine ElinaniPas encore d'évaluation
- ErzrzeDocument7 pagesErzrzeCharaf Eddine ElinaniPas encore d'évaluation
- 8 List Class OrderDocument215 pages8 List Class OrderCharaf Eddine ElinaniPas encore d'évaluation
- Analyse NumériqueDocument2 pagesAnalyse NumériqueAlbin PuelPas encore d'évaluation
- 2Document2 pages2Hicham HMPas encore d'évaluation
- 2017 Conforama FR 0028 50anstendancesnuitDocument32 pages2017 Conforama FR 0028 50anstendancesnuitAnouar AleyaPas encore d'évaluation
- Bac Blanc 1Document7 pagesBac Blanc 1Rachel BoissadyPas encore d'évaluation
- WortshatzDocument2 pagesWortshatzt8265636Pas encore d'évaluation
- TD AtmDocument1 pageTD AtmMohamed Amine SaghraouiPas encore d'évaluation
- Formatio Finance & Odk Collect PDFDocument7 pagesFormatio Finance & Odk Collect PDFHonorable Sénateur GondwanaisPas encore d'évaluation
- Ampli SélectifDocument5 pagesAmpli SélectifRiham abPas encore d'évaluation
- DesmmDocument61 pagesDesmmKarl DolifPas encore d'évaluation
- Les Raccourcis Clavier Windows 11 À Connaître - IONOSDocument7 pagesLes Raccourcis Clavier Windows 11 À Connaître - IONOSIsmaël YANOGOPas encore d'évaluation
- TT3 - CopieDocument12 pagesTT3 - CopieNadia NinouPas encore d'évaluation
- Manuel S5Document196 pagesManuel S5olivierPas encore d'évaluation
- Phase de PreparationDocument38 pagesPhase de PreparationAymane Hayani100% (3)
- N'da Yapi Georges Imprimer en CartonDocument78 pagesN'da Yapi Georges Imprimer en CartonZadi jonathanPas encore d'évaluation
- Etude Morphologique Du CouvercleDocument1 pageEtude Morphologique Du CouverclePERTUZONPas encore d'évaluation
- Le Cycle de Vie D'un LogicielDocument9 pagesLe Cycle de Vie D'un LogicielBoubacar MoidaPas encore d'évaluation
- MGL810 Hiver2013 Semaine02Document60 pagesMGL810 Hiver2013 Semaine02xp3140Pas encore d'évaluation
- Mémoire Global Serre-ELM 2018Document88 pagesMémoire Global Serre-ELM 2018Ahmed BPas encore d'évaluation
- Cours Systemes Temps Reel 2015 PDFDocument43 pagesCours Systemes Temps Reel 2015 PDFNourallah AouinaPas encore d'évaluation
- Langage SQL (Cours)Document19 pagesLangage SQL (Cours)ilyas100% (1)
- Licence Informatique - Université Côte D'azurDocument7 pagesLicence Informatique - Université Côte D'azurcybercafe kabyliePas encore d'évaluation
- BEAUMONT 2018 2019 Préparation Chambre 2Document12 pagesBEAUMONT 2018 2019 Préparation Chambre 2Thierry Leclercq100% (1)
- Khebbache Hicham PDFDocument154 pagesKhebbache Hicham PDFNoureddine GuersiPas encore d'évaluation
- 1-4 Présentation de NVGate PDFDocument51 pages1-4 Présentation de NVGate PDFBelaliaPas encore d'évaluation
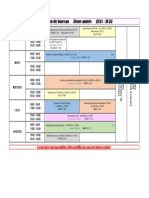
- Technicien de Bureau 2021 2022 2Document1 pageTechnicien de Bureau 2021 2022 2Sara AmiPas encore d'évaluation
- Guide Pratique PRONOTE FR 2021Document229 pagesGuide Pratique PRONOTE FR 2021yasqasPas encore d'évaluation
- Rapport de NAGIOSDocument31 pagesRapport de NAGIOSsara imanePas encore d'évaluation
- Support FODocument64 pagesSupport FOHarrabi AmorPas encore d'évaluation