Vous aimerez peut-être aussi
- Fonction Assemblage (Les Assemblages Démontables)Document24 pagesFonction Assemblage (Les Assemblages Démontables)MIMFS85% (20)
- Le Dessin D'ensemble CoursDocument8 pagesLe Dessin D'ensemble CoursKamel Tayahi67% (3)
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- Lecture DessinDocument5 pagesLecture DessinYousfi WahidPas encore d'évaluation
- Exercice Corrigé-Dessin D'ensemble Et de DefinitionDocument7 pagesExercice Corrigé-Dessin D'ensemble Et de Definitionayman100% (20)
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Guidage en Rotation Par Roulements (BC)Document9 pagesGuidage en Rotation Par Roulements (BC)MIMFS91% (11)
- Bride Hydraulique Avec CorrectionDocument3 pagesBride Hydraulique Avec Correctionguymgi79% (24)
- Cotation FonctionnelleDocument16 pagesCotation FonctionnelleMIMFS90% (10)
- Le Dessin D'ensembleDocument8 pagesLe Dessin D'ensemblekonan kouakou abel75% (4)
- AssemblageDocument21 pagesAssemblageMOHAMED CHERIF KHATRAOUI100% (5)
- Coupes Et SectionsDocument14 pagesCoupes Et Sections3ab9our92% (13)
- Cotation FonctionnelleDocument19 pagesCotation FonctionnelleChayma Gueddari67% (3)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Unité Transmettre 1 STE - Partie 1Document68 pagesUnité Transmettre 1 STE - Partie 1Boulette Moulay Hfid67% (3)
- Cours Le Dessin Technique ProfDocument3 pagesCours Le Dessin Technique Profmanaa_saadeddine100% (27)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Vé Reglable en Hauteur-2020Document5 pagesVé Reglable en Hauteur-2020Kamel Tayahi67% (3)
- Cours 4 S Technologique TunisieDocument312 pagesCours 4 S Technologique Tunisiemechergui92% (12)
- Transmettre-2SMB Eleve 2014Document81 pagesTransmettre-2SMB Eleve 2014mdrougui100% (8)
- Coupes Et Sections 2Document4 pagesCoupes Et Sections 23ab9our92% (12)
- Devoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERDocument6 pagesDevoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERSlimTbiniPas encore d'évaluation
- CHAPITRE 1 - Liaisons MécaniquesDocument10 pagesCHAPITRE 1 - Liaisons MécaniquesAnouar100% (18)
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiPas encore d'évaluation
- Guidage en Rotation Par Roulements (BT Et KB)Document6 pagesGuidage en Rotation Par Roulements (BT Et KB)MIMFS67% (12)
- Exo Dessin IndustrielDocument2 pagesExo Dessin IndustrielArthur Franck Patrick BledouPas encore d'évaluation
- Unité Transmettre 1 STE - Partie 2Document50 pagesUnité Transmettre 1 STE - Partie 2Boulette Moulay Hfid96% (24)
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- Bride À Machoire (Corrigé) PDFDocument9 pagesBride À Machoire (Corrigé) PDFNaoufel Fares67% (3)
- Exercice Cotation FonctionnelleDocument5 pagesExercice Cotation Fonctionnellehoucine198940% (5)
- CHAPITRE 3 - Guidage en TranslationDocument6 pagesCHAPITRE 3 - Guidage en TranslationAnouar90% (10)
- Cahier Meca 3 STDocument137 pagesCahier Meca 3 STMohamed Mtaallah100% (18)
- Coupes Leç&exosDocument24 pagesCoupes Leç&exos3ab9our100% (13)
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Cotation FonctionnelleDocument27 pagesCotation FonctionnelleOutmane Lakhlili100% (14)
- La Cotation FonctionnelleDocument7 pagesLa Cotation FonctionnelleToinou06100% (8)
- Cours Dessin TechniqueDocument4 pagesCours Dessin Techniquemarouane42100% (6)
- TD Bride HydrauliqueDocument6 pagesTD Bride Hydrauliquekefnei89% (9)
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfNedrosat89% (9)
- Meule À MainDocument2 pagesMeule À MainHamza 01100% (1)
- Cours Visserie Boulonnerie PDocument4 pagesCours Visserie Boulonnerie Pchris100% (5)
- Dossier de Technologie de Construction Mécanique 1Document50 pagesDossier de Technologie de Construction Mécanique 1ahmed92% (12)
- Construction MécaniqueDocument3 pagesConstruction MécaniqueBaathie Sarr73% (11)
- Guidage en Rotation Exercice Corrigé N°1 (Type BC)Document1 pageGuidage en Rotation Exercice Corrigé N°1 (Type BC)Hamami Aymen100% (8)
- Résumé-De-Cours Dessin D'ensembleDocument9 pagesRésumé-De-Cours Dessin D'ensembleatika kabouyaPas encore d'évaluation
- Fiche Sur Lecture Dun Dessin Densemble 1 PDFDocument9 pagesFiche Sur Lecture Dun Dessin Densemble 1 PDFSonia SalahPas encore d'évaluation
- Devoir+de+Controle+N1 1AS 2022 VéDocument4 pagesDevoir+de+Controle+N1 1AS 2022 Vénouha meddebPas encore d'évaluation
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- Examen - Partieschéma CinématiqueDocument1 pageExamen - Partieschéma CinématiquemajdaPas encore d'évaluation
- Révision Montage 2ScDocument5 pagesRévision Montage 2ScMarouen Mekki100% (1)
- Devoir+de+controle+N1-1 BackupDocument5 pagesDevoir+de+controle+N1-1 BackupRasmi Baananou0% (1)
- ds1 0506 PDFDocument14 pagesds1 0506 PDFzaouia ayoubPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchPas encore d'évaluation
- Dessin Ensemble 22Document4 pagesDessin Ensemble 22El Hâfÿîdÿî KamelPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Perforatrice - 1ère AS (2012-2013) MR BAAZAOUI AbderraoufDocument8 pagesDevoir de Synthèse N°2 - Technologie Perforatrice - 1ère AS (2012-2013) MR BAAZAOUI Abderraoufmedaminebennacer30Pas encore d'évaluation
- Les Engrenages Cours BacDocument6 pagesLes Engrenages Cours Bacchaouch.najehPas encore d'évaluation
- Aide À La Lecture Dun Plan-ProfDocument15 pagesAide À La Lecture Dun Plan-ProfMdzayd EL FahimePas encore d'évaluation
- DC1 2023Document5 pagesDC1 2023Lamiss GhoulPas encore d'évaluation
- Correction dc2 1as 2022Document3 pagesCorrection dc2 1as 2022Karim AmmiPas encore d'évaluation
- Transformation de MVTDocument24 pagesTransformation de MVTMIMFS91% (11)
- Correction (Articulation en Porte À Faux) (Act 5-3)Document1 pageCorrection (Articulation en Porte À Faux) (Act 5-3)MIMFS67% (3)
- Transformation Des Mvts ApplicationDocument4 pagesTransformation Des Mvts ApplicationMIMFS50% (2)
- Formulaire de MécaniqueDocument11 pagesFormulaire de MécaniqueMIMFS91% (11)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- Articulation en Porte À Faux (Act5-5)Document1 pageArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- Correction (Chariot Tour) (Act3-3)Document1 pageCorrection (Chariot Tour) (Act3-3)MIMFSPas encore d'évaluation
- Chariot Micro Tour (Act 3-3)Document1 pageChariot Micro Tour (Act 3-3)MIMFS100% (1)
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Poupée Mobile (Act 1-3)Document1 pagePoupée Mobile (Act 1-3)MIMFSPas encore d'évaluation
- Application+Flexions+10 11Document2 pagesApplication+Flexions+10 11ntayoubPas encore d'évaluation
- Correction (Act1-3)Document1 pageCorrection (Act1-3)MIMFSPas encore d'évaluation
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- La Torsion Simple (Cours Bac)Document3 pagesLa Torsion Simple (Cours Bac)MIMFS82% (11)
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Document1 pageChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
- Correction (Chariot Longitudinal) (Act 2-3)Document1 pageCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- La Flexion Plane Simple (Cours 3 SCT)Document4 pagesLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Les Eléments StandardDocument6 pagesLes Eléments StandardMIMFS100% (1)
- Liaison Encastrement1Document14 pagesLiaison Encastrement1MIMFS100% (1)
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- Ion Fonctionnelle D'un ProduitDocument17 pagesIon Fonctionnelle D'un ProduitMIMFS100% (1)
- Désignation Des MatériauxDocument5 pagesDésignation Des MatériauxMIMFS100% (8)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- Intégration D'une Pompe À Chaleur Dans Un Procédé Agroalimentaire - Simulation, Expérimentation Et IntégrationDocument137 pagesIntégration D'une Pompe À Chaleur Dans Un Procédé Agroalimentaire - Simulation, Expérimentation Et Intégrationmonsterh5100% (1)
- Mémoire Corrigé 2021 - Hablal, Hadj Youcef - Master 2Document100 pagesMémoire Corrigé 2021 - Hablal, Hadj Youcef - Master 2Ouail oulhassiPas encore d'évaluation
- Maillage 4Document1 pageMaillage 4Reda BengrabPas encore d'évaluation
- PolyDocument84 pagesPolyPedroPas encore d'évaluation
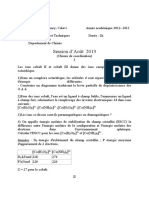
- AoutDocument2 pagesAoutBaroka julien YANEPas encore d'évaluation
- CSI3120 Assignment 1Document4 pagesCSI3120 Assignment 1P o o P o o H e a dPas encore d'évaluation
- Demarrage Des Moteurs Prof V 2k6Document16 pagesDemarrage Des Moteurs Prof V 2k6havoc2012100% (1)
- Exercices - Asservissement A ChercherDocument13 pagesExercices - Asservissement A ChercherLaurenne YaoPas encore d'évaluation
- Eval 1 - 3e - BaremeDocument4 pagesEval 1 - 3e - BaremeemmanuelcreantorPas encore d'évaluation
- Echangeur Thermique Chapitre 1Document24 pagesEchangeur Thermique Chapitre 1aba diawPas encore d'évaluation
- 15 Classeur Zero PDFDocument7 pages15 Classeur Zero PDFamoura0% (1)
- Forod 1bac Si s1 1Document4 pagesForod 1bac Si s1 1Abderrazak MiassarPas encore d'évaluation
- Fabrication Du DichlorométhaneDocument2 pagesFabrication Du DichlorométhaneAmi naPas encore d'évaluation
- Vade-Mecum Acheteur Accessoires Levage PDFDocument31 pagesVade-Mecum Acheteur Accessoires Levage PDFX HunterPas encore d'évaluation
- Relation D'équivalence, Relation D'ordreDocument3 pagesRelation D'équivalence, Relation D'ordreOmar AmrouchePas encore d'évaluation
- Traitement Signal Analogique NumeriqueDocument72 pagesTraitement Signal Analogique Numeriquebouzid mhamdiPas encore d'évaluation
- Epreuves Ecrit Concours P40Document4 pagesEpreuves Ecrit Concours P40محند ايت يحياتنPas encore d'évaluation
- Série de Révision2 (DR) (Corrigé)Document6 pagesSérie de Révision2 (DR) (Corrigé)Wagih MrassiPas encore d'évaluation
- TP1 JavaDocument2 pagesTP1 JavaMohamedReda SaidiPas encore d'évaluation
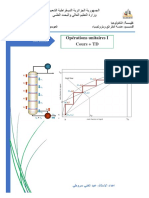
- Cours TD AbsorptionDocument21 pagesCours TD Absorptionمحمد خشعيPas encore d'évaluation
- Vii DigitalisationDocument9 pagesVii DigitalisationMou MenPas encore d'évaluation
- Chromatographie Planaire: Antoine M. SIOUFFIDocument27 pagesChromatographie Planaire: Antoine M. SIOUFFIOualid100% (1)
- Rapport Etude 1Document7 pagesRapport Etude 1ArielValdPas encore d'évaluation
- Chapitre 1 Vibration Des Systèmes Mécaniques DisctretsDocument32 pagesChapitre 1 Vibration Des Systèmes Mécaniques DisctretsIsmail Elbaz100% (1)
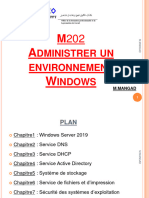
- M202-Administrer Un Environnement WindowsDocument216 pagesM202-Administrer Un Environnement WindowsotmanwbouwPas encore d'évaluation
- Devoir de Synthèse N°2 - Math - 3ème Informatique (2012-2013) MR Lahbib GhalebDocument2 pagesDevoir de Synthèse N°2 - Math - 3ème Informatique (2012-2013) MR Lahbib GhalebKhili MouhamedPas encore d'évaluation
- Correction Ro Efb Mai 2014Document5 pagesCorrection Ro Efb Mai 2014Mohamed AssadPas encore d'évaluation
- Les Méthodes de MaintenanceDocument3 pagesLes Méthodes de MaintenanceSàmi BmPas encore d'évaluation
- TP AccessDocument2 pagesTP AccessOmar OughzalPas encore d'évaluation
- Db27Kse: Groupe ElectrogeneDocument4 pagesDb27Kse: Groupe ElectrogeneDa silva Antonio DanyPas encore d'évaluation