Vous aimerez peut-être aussi
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDocument2 pagesChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebPas encore d'évaluation
- EngrenagDocument7 pagesEngrenagAbderrazak MiassarPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenageszohirPas encore d'évaluation
- Chapitre 5 Transmission Puissance EngrenagesDocument14 pagesChapitre 5 Transmission Puissance EngrenagesDhaouadi AymenPas encore d'évaluation
- CH VII Trasmission de MVT Par Engrenage Source Httpsslideplayer - Frslide1395771Document13 pagesCH VII Trasmission de MVT Par Engrenage Source Httpsslideplayer - Frslide1395771ALAMIPas encore d'évaluation
- Cours Tolérances Et AjustementsDocument11 pagesCours Tolérances Et Ajustementsexpert diag autoPas encore d'évaluation
- Progression Programme 2STMDocument1 pageProgression Programme 2STMadil100% (1)
- Accouplements, Embrayages, FreinsDocument20 pagesAccouplements, Embrayages, FreinsrachidaccPas encore d'évaluation
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDocument7 pagesCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaPas encore d'évaluation
- Liaison PivotDocument6 pagesLiaison Pivotsaded05Pas encore d'évaluation
- 5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsDocument13 pages5 - Cahp 5 Transmission de Puissance Par Engrenages - EtudiantsSaber Hamdi0% (1)
- Variateurs CastellaDocument2 pagesVariateurs CastellaaaaaPas encore d'évaluation
- Correction de DentureDocument5 pagesCorrection de DenturetopjobPas encore d'évaluation
- Visserie, Boulonnerieetécrous 1681413364763Document21 pagesVisserie, Boulonnerieetécrous 1681413364763Coumba DialloPas encore d'évaluation
- Guidage en Rotation PDFDocument7 pagesGuidage en Rotation PDFAyyoub BadreddinePas encore d'évaluation
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriPas encore d'évaluation
- Train D'engrenageDocument13 pagesTrain D'engrenageAziza KarirPas encore d'évaluation
- G PDFDocument34 pagesG PDFyassine22100% (1)
- Chap 2 EngrenagesDocument19 pagesChap 2 EngrenagesMhd Koundio100% (1)
- Cours Pignons Chaine LvesDocument1 pageCours Pignons Chaine LvesBouthalja FaikaPas encore d'évaluation
- 130 Engrenages PreparationDocument9 pages130 Engrenages PreparationIkram MisbahPas encore d'évaluation
- EngrenageDocument33 pagesEngrenagechaouch.najehPas encore d'évaluation
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Les Accouplements 2 Bac Science DingenieurDocument3 pagesLes Accouplements 2 Bac Science DingenieurkololoPas encore d'évaluation
- EngrenagesDocument12 pagesEngrenagesMouwadine Moussa100% (1)
- PalanDocument7 pagesPalanYounes Benjelloun100% (1)
- Arbres Roulements Coussinets Vol 1Document3 pagesArbres Roulements Coussinets Vol 1Malik Mak100% (2)
- 16-Polie Courroie PDFDocument2 pages16-Polie Courroie PDFHanane TounsiPas encore d'évaluation
- Technique CCCDocument15 pagesTechnique CCCNÖÚ HÄPas encore d'évaluation
- Rattrapage Corrigé 2012 PDFDocument7 pagesRattrapage Corrigé 2012 PDFGuiliassPas encore d'évaluation
- Cotation Tolérancée Et AjustementsDocument8 pagesCotation Tolérancée Et AjustementsBen Aissa ChokriPas encore d'évaluation
- 3 3 Transformation MVT v4Document2 pages3 3 Transformation MVT v4Sofiene GuedriPas encore d'évaluation
- Roues de FrictionDocument8 pagesRoues de FrictionTom JerryPas encore d'évaluation
- M17 - Montage Et Ajustement D'arbres - de Roulements Et de Coussinets GE-ESADocument8 pagesM17 - Montage Et Ajustement D'arbres - de Roulements Et de Coussinets GE-ESAMohammed Amine Kened50% (2)
- Liaison PivotDocument54 pagesLiaison PivotElgoHouda100% (1)
- Transmissions de Puissance PDFDocument6 pagesTransmissions de Puissance PDFKhaled SouaissaPas encore d'évaluation
- 1.guidage en Rotation Par RoulementDocument15 pages1.guidage en Rotation Par RoulementMOUSAVOU MORVANE100% (1)
- F3 ApefDocument5 pagesF3 ApefZouhairPas encore d'évaluation
- Filetage - Taraudage 1Document5 pagesFiletage - Taraudage 1medelaidPas encore d'évaluation
- Ci5 TD Mecanisme CameDocument1 pageCi5 TD Mecanisme Cameleroy makita loubakiPas encore d'évaluation
- TD5 Vocabulaire Dzierla CédricDocument4 pagesTD5 Vocabulaire Dzierla CédricCédric DziePas encore d'évaluation
- Guidage en Rotation Final CourDocument12 pagesGuidage en Rotation Final CourOmar ChahirPas encore d'évaluation
- Chapitre 5 - Guidage en RotationDocument17 pagesChapitre 5 - Guidage en Rotationahidouri100% (1)
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- 04 Ajustements ProfesseurDocument10 pages04 Ajustements Professeursaded05Pas encore d'évaluation
- TP de TPM FinDocument17 pagesTP de TPM FinJuge “JMK” Mpanga kabojyaPas encore d'évaluation
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- 16 Engrenages PDFDocument10 pages16 Engrenages PDFdjalikadjouPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- TransmissionDocument10 pagesTransmissionSlah TounsiPas encore d'évaluation
- Cours Engrenage+Train Epicycloidal+DifférentielDocument54 pagesCours Engrenage+Train Epicycloidal+DifférentielCrazy yt100% (1)
- Cours Les Engr DentuDocument11 pagesCours Les Engr DentuKader HoumitaPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenagesOussama BkPas encore d'évaluation
- Cours Les Engr Dentu DroitesDocument10 pagesCours Les Engr Dentu Droitesben 10Pas encore d'évaluation
- Chapitre 10 Les EngrenagesDocument10 pagesChapitre 10 Les Engrenagesben salem Naofel100% (1)
- Transformation Des Mvts ApplicationDocument4 pagesTransformation Des Mvts ApplicationMIMFS50% (2)
- Transformation de MVTDocument24 pagesTransformation de MVTMIMFS91% (11)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Formulaire de MécaniqueDocument11 pagesFormulaire de MécaniqueMIMFS91% (11)
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- Correction (Articulation en Porte À Faux) (Act 5-3)Document1 pageCorrection (Articulation en Porte À Faux) (Act 5-3)MIMFS67% (3)
- Articulation en Porte À Faux (Act5-5)Document1 pageArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- La Flexion Plane Simple (Cours 3 SCT)Document4 pagesLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Correction (Chariot Tour) (Act3-3)Document1 pageCorrection (Chariot Tour) (Act3-3)MIMFSPas encore d'évaluation
- Chariot Micro Tour (Act 3-3)Document1 pageChariot Micro Tour (Act 3-3)MIMFS100% (1)
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Document1 pageChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
- Correction (Chariot Longitudinal) (Act 2-3)Document1 pageCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Correction (Act1-3)Document1 pageCorrection (Act1-3)MIMFSPas encore d'évaluation
- Poupée Mobile (Act 1-3)Document1 pagePoupée Mobile (Act 1-3)MIMFSPas encore d'évaluation
- La Torsion Simple (Cours Bac)Document3 pagesLa Torsion Simple (Cours Bac)MIMFS82% (11)
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Application+Flexions+10 11Document2 pagesApplication+Flexions+10 11ntayoubPas encore d'évaluation
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- Ion Fonctionnelle D'un ProduitDocument17 pagesIon Fonctionnelle D'un ProduitMIMFS100% (1)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Liaison Encastrement1Document14 pagesLiaison Encastrement1MIMFS100% (1)
- Les Eléments StandardDocument6 pagesLes Eléments StandardMIMFS100% (1)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Désignation Des MatériauxDocument5 pagesDésignation Des MatériauxMIMFS100% (8)
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- Chapitre 1Document1 pageChapitre 1MIMFS100% (1)
- RAPPORT D1ter NGARI NDJINDJILADocument2 pagesRAPPORT D1ter NGARI NDJINDJILAharriss ngariPas encore d'évaluation
- Data Panne Renault Clio 2 15cc DcidocDocument19 pagesData Panne Renault Clio 2 15cc DcidoctoufikPas encore d'évaluation
- Descriptif Technique Pelle Hydraulique Pelle en Manutention Poids enDocument10 pagesDescriptif Technique Pelle Hydraulique Pelle en Manutention Poids enLiebherrPas encore d'évaluation
- 10 Accouplements TemporairesDocument20 pages10 Accouplements Temporaireszouhour brahmi100% (1)
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- Cours Les Roulements PDFDocument21 pagesCours Les Roulements PDFamr_akram_2100% (7)
- 20150054-SC10-Schéma de Principe HVAC-EcoleDocument1 page20150054-SC10-Schéma de Principe HVAC-EcoleTroi LauraPas encore d'évaluation
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- 50498fb55ca38 PDFDocument23 pages50498fb55ca38 PDFAhmedPas encore d'évaluation
- Mécanique AutomobileDocument2 pagesMécanique AutomobileRihabChommakhPas encore d'évaluation
- Ms GM Guenad PDFDocument80 pagesMs GM Guenad PDFAbd RazakPas encore d'évaluation
- Turbine À GazDocument7 pagesTurbine À GazilyasPas encore d'évaluation
- 822D L822D 1.1FR 0418 Hi ResDocument6 pages822D L822D 1.1FR 0418 Hi Restystar_21Pas encore d'évaluation
- Lifton Neuson Wacker 2001 Dumper Parts BOOKDocument81 pagesLifton Neuson Wacker 2001 Dumper Parts BOOKMichael BochoridisPas encore d'évaluation
- MR356MASTERPRO1Document59 pagesMR356MASTERPRO1renaultPas encore d'évaluation
- KIPOR - Manuel Du Moteur Diesel MulticylindreDocument30 pagesKIPOR - Manuel Du Moteur Diesel MulticylindreAchraf Mesnaoui100% (1)
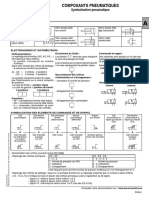
- Composants Pneumatiques: Symbolisation PneumatiqueDocument2 pagesComposants Pneumatiques: Symbolisation PneumatiqueZbreh SkeeperPas encore d'évaluation
- Report CDL 07-08-2023 BOMAG BW 200 SeriesDocument23 pagesReport CDL 07-08-2023 BOMAG BW 200 SeriesAurélien JAMPIERREPas encore d'évaluation
- Vdocuments - MX - Bombas de Pedrollo de 05 HP PDFDocument24 pagesVdocuments - MX - Bombas de Pedrollo de 05 HP PDFErickPas encore d'évaluation
- Chapitre 1 Generalité Sur Les TurbomachinesDocument10 pagesChapitre 1 Generalité Sur Les TurbomachinesRana HnaPas encore d'évaluation
- Exposée ArduinoDocument15 pagesExposée ArduinoIheb Hamed100% (1)
- Cours Courroies Chaines eDocument2 pagesCours Courroies Chaines egeupierPas encore d'évaluation
- These Du ChaudDocument186 pagesThese Du ChaudhenriPas encore d'évaluation
- Boîte de Vitesses Mécanique C530.6: CaractéristiquesDocument5 pagesBoîte de Vitesses Mécanique C530.6: Caractéristiquestoni13021302Pas encore d'évaluation
- Moteurs Diesel Moteur 1 9DDocument38 pagesMoteurs Diesel Moteur 1 9Dabdelhak deghdeghPas encore d'évaluation
- 09vueschema PDFDocument5 pages09vueschema PDFBaptiste BastianelloPas encore d'évaluation
- Architecture - Entretien - D - Un - Moteur Diesel - Mecanique - Naval - Construction - MécaniqueDocument14 pagesArchitecture - Entretien - D - Un - Moteur Diesel - Mecanique - Naval - Construction - MécaniqueRodolphe SounouPas encore d'évaluation
- Liaison GlissiereDocument19 pagesLiaison GlissiereBilly BignakePas encore d'évaluation
- Moteurs ThermiquesDocument16 pagesMoteurs ThermiquesMehdiaPas encore d'évaluation
- Manitou MRT 3255 - MRT-X 3255 (FR)Document4 pagesManitou MRT 3255 - MRT-X 3255 (FR)ManitouPas encore d'évaluation