Vous aimerez peut-être aussi
- Gestion Des Conflits Au TravailDocument179 pagesGestion Des Conflits Au TravailSofiene GuedriPas encore d'évaluation
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Cour Chaines PRDocument2 pagesCour Chaines PRMohamed LarbiPas encore d'évaluation
- Mouvement PlanDocument5 pagesMouvement Plansimouhamed83Pas encore d'évaluation
- Corrige Technique Controle2018 PDFDocument31 pagesCorrige Technique Controle2018 PDFHamami AymenPas encore d'évaluation
- Protection TransformateurDocument78 pagesProtection TransformateurDjebien Ahmed Abu AbderrahimPas encore d'évaluation
- Cours Transformation de MouvementDocument10 pagesCours Transformation de MouvementAsma MoussaPas encore d'évaluation
- Mecanisme de Transformation de Mouvement Systeme Vis EcrouDocument3 pagesMecanisme de Transformation de Mouvement Systeme Vis Ecrousahl silverPas encore d'évaluation
- Corrige Marchandises 2015Document20 pagesCorrige Marchandises 2015Sofiene Guedri83% (6)
- 05-Notion de FiletageDocument8 pages05-Notion de FiletagedayangPas encore d'évaluation
- Traction Et Compression Simple FiniDocument10 pagesTraction Et Compression Simple FiniToxic DEVPas encore d'évaluation
- Montage de RoulementsDocument1 pageMontage de RoulementskhocinePas encore d'évaluation
- TD 4 Réducteur Par EngrenagesDocument4 pagesTD 4 Réducteur Par EngrenagesYacouba OuedraogoPas encore d'évaluation
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- Recyclage 7Document36 pagesRecyclage 7Youness El Hamri100% (2)
- Cours Montage Des RoulementsDocument19 pagesCours Montage Des RoulementsMed BejjaPas encore d'évaluation
- Theorie Des Graphes 1.ppsxDocument40 pagesTheorie Des Graphes 1.ppsxSofiene GuedriPas encore d'évaluation
- Kaushitaki Brahmana Upanishad (Document)Document19 pagesKaushitaki Brahmana Upanishad (Document)giovannagarritanoPas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Normale Corigé 2012 PDFDocument8 pagesNormale Corigé 2012 PDFGuiliassPas encore d'évaluation
- Sciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesDocument23 pagesSciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesSofiene GuedriPas encore d'évaluation
- Sciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesDocument23 pagesSciences Industrielles Pour L'ingénieur: Méthodes Et ExercicesSofiene GuedriPas encore d'évaluation
- Memoire Kouider Elouahed Chahinez Et Malaoui NihelDocument104 pagesMemoire Kouider Elouahed Chahinez Et Malaoui NihelMme TIHALPas encore d'évaluation
- Corrige Examen FF 2020 TSMFMDocument10 pagesCorrige Examen FF 2020 TSMFMSou Mia67% (6)
- S302 Transmision EngrenagesProDocument18 pagesS302 Transmision EngrenagesPronaceur rbiiPas encore d'évaluation
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDocument7 pagesCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaPas encore d'évaluation
- Roues de FrictionDocument8 pagesRoues de FrictionTom JerryPas encore d'évaluation
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinPas encore d'évaluation
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- 09 - Trains EpicycloïdauxDocument9 pages09 - Trains EpicycloïdauxOumaimaPas encore d'évaluation
- Chaine CinematiqueDocument8 pagesChaine CinematiqueBRAHAM Alaeddine100% (3)
- G PDFDocument34 pagesG PDFyassine22100% (1)
- Corrigé Mécanique T1 GP1 2021Document6 pagesCorrigé Mécanique T1 GP1 2021kara baPas encore d'évaluation
- TP de TPM FinDocument17 pagesTP de TPM FinJuge “JMK” Mpanga kabojyaPas encore d'évaluation
- Transmissions de Puissance PDFDocument6 pagesTransmissions de Puissance PDFKhaled SouaissaPas encore d'évaluation
- PTSI - Cours Liaison HelicoidaleDocument10 pagesPTSI - Cours Liaison HelicoidaleDhibMohamedPas encore d'évaluation
- Ci5 TD Mecanisme CameDocument1 pageCi5 TD Mecanisme Cameleroy makita loubakiPas encore d'évaluation
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- TransmissionDocument10 pagesTransmissionSlah TounsiPas encore d'évaluation
- 130 Engrenages PreparationDocument9 pages130 Engrenages PreparationIkram MisbahPas encore d'évaluation
- Vis EcrouDocument31 pagesVis Ecrouwissal khammeriPas encore d'évaluation
- Transm TCTDocument9 pagesTransm TCTMohamed LarbiPas encore d'évaluation
- Accouplements, Embrayages, FreinsDocument20 pagesAccouplements, Embrayages, FreinsrachidaccPas encore d'évaluation
- Dynamique SiDocument10 pagesDynamique Siamo norPas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Mise en Situation: I-Situation Declenchante: Système: Perceuse Sensitive Ii - Formulation Du ProblemeDocument14 pagesMise en Situation: I-Situation Declenchante: Système: Perceuse Sensitive Ii - Formulation Du ProblemeAlibi FathiPas encore d'évaluation
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- 1.guidage en Rotation Par RoulementDocument15 pages1.guidage en Rotation Par RoulementMOUSAVOU MORVANE100% (1)
- Schema Cinematique CoursDocument4 pagesSchema Cinematique CoursRihabBelgadaPas encore d'évaluation
- Fonction Mécanique LiaisonDocument11 pagesFonction Mécanique LiaisonmoihaPas encore d'évaluation
- Corrige Questions Mecanique BisDocument8 pagesCorrige Questions Mecanique BisSidi RachPas encore d'évaluation
- 24 Roues de FrictionDocument6 pages24 Roues de FrictionDocteur SamPas encore d'évaluation
- Cinématique GraphiqueDocument4 pagesCinématique GraphiqueDABAKH LDEEBOYPas encore d'évaluation
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocument2 pagesLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- Chap 2 EngrenagesDocument19 pagesChap 2 EngrenagesMhd Koundio100% (1)
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Numeration EleecDocument21 pagesNumeration EleecSalif NanaPas encore d'évaluation
- B22 Limiteurs CoupleDocument3 pagesB22 Limiteurs CouplentayoubPas encore d'évaluation
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- Cours Trans MVT 2015Document4 pagesCours Trans MVT 2015Nabil Ouled AhmedPas encore d'évaluation
- 04 Exercice CremaillereDocument1 page04 Exercice CremaillereAhmed Najjar100% (1)
- Thème: Analyse ETDocument11 pagesThème: Analyse ETمهدي الرقيقPas encore d'évaluation
- Fiche de Poste Personnel Educatif AVADocument2 pagesFiche de Poste Personnel Educatif AVASofiene GuedriPas encore d'évaluation
- Exo ThermoDocument24 pagesExo ThermoSofiene Guedri100% (1)
- 11 Lois Binom Poisson SolDocument4 pages11 Lois Binom Poisson SolSofiene GuedriPas encore d'évaluation
- 4 Retro PropagationDocument30 pages4 Retro PropagationSofiene GuedriPas encore d'évaluation
- RNDocument4 pagesRNSofiene GuedriPas encore d'évaluation
- 7408417Document48 pages7408417Sofiene GuedriPas encore d'évaluation
- 1 PDFDocument16 pages1 PDFSofiene GuedriPas encore d'évaluation
- PCVMecaPneu1 2015Document65 pagesPCVMecaPneu1 2015Sofiene GuedriPas encore d'évaluation
- RCP208 TP4 PDFDocument4 pagesRCP208 TP4 PDFSofiene GuedriPas encore d'évaluation
- Rapport de Sensibilisation - DéfinitifDocument51 pagesRapport de Sensibilisation - DéfinitifLova AndriamanampisoaPas encore d'évaluation
- 2019 09 LID SM Catalogue de Garnitures Mecaniques SouflletDocument94 pages2019 09 LID SM Catalogue de Garnitures Mecaniques SouflletAbdellatif BelkhairPas encore d'évaluation
- RD N°0302Document6 pagesRD N°0302DOMINGO ModestePas encore d'évaluation
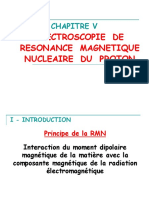
- CHAPVDocument27 pagesCHAPVM LPas encore d'évaluation
- D1 1S1 2019 LSLL Wahab-DiopFirstDocument2 pagesD1 1S1 2019 LSLL Wahab-DiopFirstYaya Touré100% (1)
- Synthèses InfoDocument98 pagesSynthèses InfoJasmin AbdallahPas encore d'évaluation
- Fanuc Serie 16 PDFDocument1 119 pagesFanuc Serie 16 PDFKhalil Radouane100% (1)
- Metaplasie CIN: Diu de ColposcopieDocument50 pagesMetaplasie CIN: Diu de ColposcopieMaria MogosPas encore d'évaluation
- Varlogic N - 52449Document2 pagesVarlogic N - 52449valery tagne tallePas encore d'évaluation
- 14 - Imposition Des Res Des Stes IR NPCDocument6 pages14 - Imposition Des Res Des Stes IR NPCRuffin MickaelPas encore d'évaluation
- Canon mf740 mf746 mf744 mf742Document4 pagesCanon mf740 mf746 mf744 mf742InoleroiPas encore d'évaluation
- 02 L'acte de Constitution Haiti Sante de L'eauDocument4 pages02 L'acte de Constitution Haiti Sante de L'eauAinekPas encore d'évaluation
- La Somme Et Le Reste No. 18Document21 pagesLa Somme Et Le Reste No. 18alfredorubiobazan5168Pas encore d'évaluation
- Expressions À Utiliser Dans Une Introduction: Trois Étapes Sont À EnvisagerDocument3 pagesExpressions À Utiliser Dans Une Introduction: Trois Étapes Sont À Envisagerhorny negroPas encore d'évaluation
- Plaquettes MPSI PCSI 2023Document2 pagesPlaquettes MPSI PCSI 2023spartacus.avoukarouillePas encore d'évaluation
- Découvrir Mahajanga en 3 JoursDocument13 pagesDécouvrir Mahajanga en 3 JoursMicha JohnsonPas encore d'évaluation
- RGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKDocument76 pagesRGPH-5 Manuel AR v30032023 Ok Fin Mars 2023+coord OKLa RosePas encore d'évaluation
- DN214Document8 pagesDN214Den LeonidasPas encore d'évaluation
- Beirut University Letter of Motivation For Landscape Architecture MasterDocument2 pagesBeirut University Letter of Motivation For Landscape Architecture MasterBEIRUT100% (2)
- Rapport de Stage 3e GRABEDocument19 pagesRapport de Stage 3e GRABESamuel SalisPas encore d'évaluation
- Appel BM012023Document80 pagesAppel BM012023ابراهيمهبولةPas encore d'évaluation
- P1C3-Formulaire Fiche IdentitéDocument1 pageP1C3-Formulaire Fiche Identitémoustafa officielPas encore d'évaluation
- Algerie RechangeDocument48 pagesAlgerie RechangeSalim MouradPas encore d'évaluation
- QGIS 2.8 UserGuide FRDocument349 pagesQGIS 2.8 UserGuide FRFaniry Anja RandrianPas encore d'évaluation
- Manuel Stock It Easy 8Document120 pagesManuel Stock It Easy 8Yannick TallaPas encore d'évaluation