Vous aimerez peut-être aussi
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFkhocine67% (6)
- Repdes AppDocument15 pagesRepdes Appkuzgun cebeciPas encore d'évaluation
- Roues Et Chaine 2015Document3 pagesRoues Et Chaine 2015barryhamadounallaye1100% (1)
- Exercices - Poulies - Courroie Et Pignons - Chaine PDFDocument3 pagesExercices - Poulies - Courroie Et Pignons - Chaine PDFAbdelmajid Aittaleb50% (2)
- 5 Transmission de PuissanceDocument5 pages5 Transmission de Puissance9rinaPas encore d'évaluation
- Transmission Puissance 1ere Doc ÉlèveDocument5 pagesTransmission Puissance 1ere Doc ÉlèveMarouen Mekki100% (1)
- Cours Trans MVT 2015Document4 pagesCours Trans MVT 2015Nabil Ouled AhmedPas encore d'évaluation
- Exercice 1.: Question: Déterminer Les 3 Rapports de Transmission de Ce RéducteurDocument4 pagesExercice 1.: Question: Déterminer Les 3 Rapports de Transmission de Ce Réducteurakarne YounessPas encore d'évaluation
- Dcn3 3t1 Mecanisme de Transmission CorrectionDocument4 pagesDcn3 3t1 Mecanisme de Transmission CorrectionGuiliass100% (1)
- Chapitre 2Document18 pagesChapitre 2riad chouiterPas encore d'évaluation
- 3 3 Transformation MVT v4Document2 pages3 3 Transformation MVT v4Sofiene GuedriPas encore d'évaluation
- Transs Puissance Amjed Sadem 2024Document16 pagesTranss Puissance Amjed Sadem 2024hamPas encore d'évaluation
- DRDocument8 pagesDRKasi FilsPas encore d'évaluation
- Transmission de Mouvement ExercicesDocument2 pagesTransmission de Mouvement ExercicesDahi ElmehdiPas encore d'évaluation
- Devoir 1 - 2018Document3 pagesDevoir 1 - 2018aylagnebPas encore d'évaluation
- Cours Reducteurs de VitesseDocument1 pageCours Reducteurs de VitesseYassine Elbiad100% (2)
- Exercice Courroies Chaines eDocument2 pagesExercice Courroies Chaines echrisPas encore d'évaluation
- TD Poulie CourroieDocument2 pagesTD Poulie CourroieAbdellah Faqdani100% (2)
- Transmission PDFDocument3 pagesTransmission PDFMondher KadPas encore d'évaluation
- 33 EngrenagesDocument11 pages33 EngrenagesetalibPas encore d'évaluation
- Devoir Engrenages eDocument8 pagesDevoir Engrenages esb ali100% (1)
- 15 Transformation de MouvementDocument7 pages15 Transformation de MouvementMrnadhir Mecanique0% (1)
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- Devoir Transmission 230513 222902Document2 pagesDevoir Transmission 230513 222902Mohamd BobsPas encore d'évaluation
- S302 Transmision EngrenagesProDocument18 pagesS302 Transmision EngrenagesPronaceur rbiiPas encore d'évaluation
- Sujet 5Document4 pagesSujet 5Amin ChabchoubPas encore d'évaluation
- Ci-2: Chaine D'Energie Transmission Par EngrenagesDocument6 pagesCi-2: Chaine D'Energie Transmission Par Engrenageskilili benaliPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- Examen 3ème 2013THSADocument14 pagesExamen 3ème 2013THSAAYA OUEZGANPas encore d'évaluation
- Système Vis ÉcrouDocument2 pagesSystème Vis ÉcrouTarek Ben Moncef AdouaniPas encore d'évaluation
- Serie Transmission 2Document3 pagesSerie Transmission 2mnassri houcinePas encore d'évaluation
- TD TRANSMISSIONDocument2 pagesTD TRANSMISSIONSara Id OalemPas encore d'évaluation
- Correction Série 8 Transf.mvtDocument7 pagesCorrection Série 8 Transf.mvtmohamed1101Pas encore d'évaluation
- Cours Transmission de Mouvements Et1Document17 pagesCours Transmission de Mouvements Et1zouhour brahmiPas encore d'évaluation
- Dossier CorrigéDocument11 pagesDossier CorrigéMohamed ElharouchPas encore d'évaluation
- 2-engrenagesDocument10 pages2-engrenagesZakaria NaouiPas encore d'évaluation
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument9 pagesChapitre 1 Rappels Les Machines Asynchrones TriphaseesNuno HenriquesPas encore d'évaluation
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- Robot Cybot - CorrectionDocument3 pagesRobot Cybot - CorrectionLaurent BlancPas encore d'évaluation
- Devoir de Controle N3-Transmission de mvt-2011Document3 pagesDevoir de Controle N3-Transmission de mvt-2011GR GARMANI100% (2)
- Exercices Cinematique Rotation Bac Pro IndustrielDocument5 pagesExercices Cinematique Rotation Bac Pro Industrielqualitywood.akPas encore d'évaluation
- Trains Engrenages - ProfesseurDocument10 pagesTrains Engrenages - ProfesseurbauvinprofPas encore d'évaluation
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- C8Document6 pagesC8Sami Bennour100% (1)
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- REDUCTEUR DE VITESSE MEMOIRE Corrigé 2 1 1Document15 pagesREDUCTEUR DE VITESSE MEMOIRE Corrigé 2 1 1Rebhi Akram oualidPas encore d'évaluation
- Chapitre 10 Les EngrenagesDocument10 pagesChapitre 10 Les Engrenagesben salem Naofel100% (1)
- Transmission de Ment (Doc Élev + Prof)Document10 pagesTransmission de Ment (Doc Élev + Prof)Rasmi BaananouPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- 9-Acouplements PermenantsDocument10 pages9-Acouplements PermenantsAbdelkarim GhanemPas encore d'évaluation
- Convertir Machine AsynchroneDocument5 pagesConvertir Machine AsynchroneBALLOUK SoufianePas encore d'évaluation
- TP-B3 ActivitéDocument5 pagesTP-B3 ActivitéKhouloud SaiPas encore d'évaluation
- TP Engrenages 1 - V1 - 2017 - 2018Document8 pagesTP Engrenages 1 - V1 - 2017 - 2018IMANE LOLPas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- 1 - FR - MEC - o1.2 - EXP 5 - TTP - TD1 - EnoncéDocument2 pages1 - FR - MEC - o1.2 - EXP 5 - TTP - TD1 - EnoncéJean-Orveil PAMBOUPas encore d'évaluation
- Leçon 2Document2 pagesLeçon 2مهدي الرقيقPas encore d'évaluation
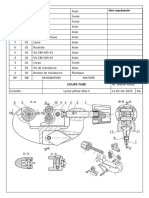
- Dessin D'ensemble Coupe-TubeDocument1 pageDessin D'ensemble Coupe-Tubeمهدي الرقيقPas encore d'évaluation
- Devoir SmartDocument4 pagesDevoir Smartمهدي الرقيقPas encore d'évaluation
- 22 CopiDocument3 pages22 Copiمهدي الرقيقPas encore d'évaluation
- Dess DefDocument2 pagesDess Defمهدي الرقيقPas encore d'évaluation
- Memo Pratique de L'orthographeDocument62 pagesMemo Pratique de L'orthographemechkad100% (4)
- 22 Copies5Document1 page22 Copies5مهدي الرقيقPas encore d'évaluation
- 2616 Automatisme de Porte de Garage Presentation PDFDocument10 pages2616 Automatisme de Porte de Garage Presentation PDFEdmond OuattaraPas encore d'évaluation
- Tole Rances Ge Ne RalesDocument19 pagesTole Rances Ge Ne Ralesمهدي الرقيقPas encore d'évaluation
- Vue en CoupeDocument0 pageVue en Coupesaded05Pas encore d'évaluation
- D CotationDocument1 pageD Cotationمهدي الرقيقPas encore d'évaluation
- Teched 910 CurrDocument58 pagesTeched 910 Currمهدي الرقيقPas encore d'évaluation
- 2013-04-23 Tole Rances Ge Ne Rales ISO 2768 PDFDocument2 pages2013-04-23 Tole Rances Ge Ne Rales ISO 2768 PDFMohamedBejjaPas encore d'évaluation
- 22 CopiesDocument2 pages22 Copiesمهدي الرقيقPas encore d'évaluation
- Poste de PliageDocument4 pagesPoste de Pliageمهدي الرقيقPas encore d'évaluation
- D - Cotation Fonctionnelle PDFDocument26 pagesD - Cotation Fonctionnelle PDFAnonymous Vhn6VwguSV100% (1)
- Proverbes PDFDocument39 pagesProverbes PDFAngelo Di MariaPas encore d'évaluation
- Ignacerak TechnologieDocument30 pagesIgnacerak Technologieمهدي الرقيقPas encore d'évaluation
- Conseils Pour Diminuer Votre Conso de Carburant1Document5 pagesConseils Pour Diminuer Votre Conso de Carburant1مهدي الرقيقPas encore d'évaluation
- Conseils Entretien AutoDocument5 pagesConseils Entretien Autoمهدي الرقيقPas encore d'évaluation
- Technologues 06Document3 pagesTechnologues 06مهدي الرقيقPas encore d'évaluation
- Thermo Dy Nami QueDocument176 pagesThermo Dy Nami Queمهدي الرقيقPas encore d'évaluation
- Conseils Entretien AutoDocument5 pagesConseils Entretien Autoمهدي الرقيقPas encore d'évaluation
- TransmissionDocument10 pagesTransmissionSlah TounsiPas encore d'évaluation
- REMAN Moteurs D Origine Echange LKW FR BE PDFDocument11 pagesREMAN Moteurs D Origine Echange LKW FR BE PDFAymen AousjiPas encore d'évaluation
- Liebherr R 944 CDocument14 pagesLiebherr R 944 CLiebherr100% (1)
- 582Document183 pages582maire_shadow0% (1)
- TP 2 Bielle ManivelleDocument8 pagesTP 2 Bielle ManivelleAmine Ghazdali100% (2)
- CAlandra Trackalaundrypart-Wascator-Ic43316-Spare-Part-Manual-406Document48 pagesCAlandra Trackalaundrypart-Wascator-Ic43316-Spare-Part-Manual-406Rogério RamalhoPas encore d'évaluation
- Copie de FusiblesDocument3 pagesCopie de FusiblesAbdelhak Ezzahrioui100% (1)
- Courant ContinuDocument111 pagesCourant ContinubenkhelilPas encore d'évaluation
- 2 Hydraulique IndustrielDocument33 pages2 Hydraulique IndustrielEtienne BouronPas encore d'évaluation
- Vdocuments - MX - Bombas de Pedrollo de 05 HP PDFDocument24 pagesVdocuments - MX - Bombas de Pedrollo de 05 HP PDFErickPas encore d'évaluation
- PALIERS SNV P1320-P1449-Corps de Palier PDFDocument130 pagesPALIERS SNV P1320-P1449-Corps de Palier PDFمحمدلمينابراهيمالموريتانيPas encore d'évaluation
- Catalogue Pièces Détachées: Spare Parts ListDocument94 pagesCatalogue Pièces Détachées: Spare Parts ListMi vida Son ellosPas encore d'évaluation
- Tp1 Catia Cinematique CpiDocument22 pagesTp1 Catia Cinematique CpiIngénierie AutomobilePas encore d'évaluation
- Serie CP CPVDocument24 pagesSerie CP CPVEdison VeraPas encore d'évaluation
- Document Réponse 1/15 1. Analyse Fonctionnelle 1.1. Expression Du BesoinDocument34 pagesDocument Réponse 1/15 1. Analyse Fonctionnelle 1.1. Expression Du Besoinjust for fun thingsPas encore d'évaluation
- Homologation Form Number 5585 Group A PDFDocument189 pagesHomologation Form Number 5585 Group A PDFThor EngebretsenPas encore d'évaluation
- Ex EngrenageDocument8 pagesEx Engrenageben salem NaofelPas encore d'évaluation
- Rapport de Stage 2éme Doc1+++Document21 pagesRapport de Stage 2éme Doc1+++saif Saadi0% (1)
- Système Moteur Triphasé - Devoir 2Document5 pagesSystème Moteur Triphasé - Devoir 2DHia Ben AichaPas encore d'évaluation
- MR339LAGUNA1Document311 pagesMR339LAGUNA1sebastianemil100% (1)
- Maquette Régime de NeutreDocument14 pagesMaquette Régime de NeutreHichem Hamdi50% (2)
- Spec 306 GR ADocument16 pagesSpec 306 GR Adamienm49Pas encore d'évaluation
- Accouplement CrsDocument6 pagesAccouplement Crselmahjouby100% (1)
- Projet PDFDocument4 pagesProjet PDFMohammed Amine LabbardiPas encore d'évaluation
- M 26 - Compressurs À Vis FGT-TFI PDFDocument86 pagesM 26 - Compressurs À Vis FGT-TFI PDFHamadou100% (1)
- CNC2016 CorrigéDocument14 pagesCNC2016 CorrigéWijdane El KhettabPas encore d'évaluation
- Chapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MTDocument20 pagesChapitre 5 - Protection, Dimensionnement Et Endtrainement À Vitesse Variable - MThamzaPas encore d'évaluation
- Renault OrganesDocument6 pagesRenault OrganesMomo MomoPas encore d'évaluation
- 12 1Document9 pages12 1Nadia SahliPas encore d'évaluation
- Surveillance Des Machines: ProgrammeDocument15 pagesSurveillance Des Machines: ProgrammeLahmarabderrahmanePas encore d'évaluation
- Fiche Technique: Isofast CDocument47 pagesFiche Technique: Isofast CYoucef RikinaPas encore d'évaluation