Vous aimerez peut-être aussi
- Strategor 2019 CompletDocument708 pagesStrategor 2019 CompletOumaima Temara100% (9)
- Transmission de MouvementDocument111 pagesTransmission de Mouvementboujbal100% (2)
- SSIAP3.F4.Lecture & Étude de PlansDocument21 pagesSSIAP3.F4.Lecture & Étude de PlansJérôme G100% (1)
- Acidocétose Diabétique EMC 2018Document11 pagesAcidocétose Diabétique EMC 2018chemmiPas encore d'évaluation
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
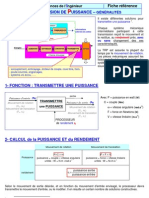
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- Cours Engrenage+Train Epicycloidal+DifférentielDocument54 pagesCours Engrenage+Train Epicycloidal+DifférentielCrazy yt100% (1)
- Cours Transmission de Mouvements Et1Document17 pagesCours Transmission de Mouvements Et1zouhour brahmiPas encore d'évaluation
- Chapitre 10 Les EngrenagesDocument10 pagesChapitre 10 Les Engrenagesben salem Naofel100% (1)
- Cours Engrenages V2Document4 pagesCours Engrenages V2dayzen jiffPas encore d'évaluation
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfNedrosat89% (9)
- 3.2.1 - Cours Prof - Engrenages DroitsDocument10 pages3.2.1 - Cours Prof - Engrenages Droitsmarouan115Pas encore d'évaluation
- Robert Elger Les Nouveaux PotagersDocument195 pagesRobert Elger Les Nouveaux PotagersAmeliePas encore d'évaluation
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- EngrenagDocument7 pagesEngrenagAbderrazak MiassarPas encore d'évaluation
- Les EngrenagesDocument10 pagesLes Engrenagessouheil_souPas encore d'évaluation
- ENGRENAGESDocument10 pagesENGRENAGESBojane100% (2)
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- Trans de MVT Cours 2Document17 pagesTrans de MVT Cours 2Anonymous LZQTDsB95APas encore d'évaluation
- EXERCICE EngrenageDocument6 pagesEXERCICE EngrenageLövlÿ HåyētPas encore d'évaluation
- Exercice Corrigés D'engrenages - Construction MécaniqueDocument7 pagesExercice Corrigés D'engrenages - Construction MécaniqueSana EmmanuelPas encore d'évaluation
- Attestation Droit SDocument2 pagesAttestation Droit SAchraf FaddouliPas encore d'évaluation
- Consultationprojet SIRHDocument25 pagesConsultationprojet SIRHMami cisséPas encore d'évaluation
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDocument2 pagesChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebPas encore d'évaluation
- Engrenage PDFDocument3 pagesEngrenage PDFAyoub El BadriPas encore d'évaluation
- Engrenages-Converti 2Document22 pagesEngrenages-Converti 2kk2577756Pas encore d'évaluation
- 02AC10 - Cours Transmission de Puissance - ProfDocument10 pages02AC10 - Cours Transmission de Puissance - ProfSewa MensahPas encore d'évaluation
- Cours Les Engr DentuDocument11 pagesCours Les Engr DentuKader HoumitaPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours Engrenagessub-ka100% (1)
- Qu'est-Ce Qu'un Engrenage ?: 1. FonctionDocument7 pagesQu'est-Ce Qu'un Engrenage ?: 1. FonctionntayoubPas encore d'évaluation
- Cours Les Engr Dentu DroitesDocument10 pagesCours Les Engr Dentu Droitesben 10Pas encore d'évaluation
- EngrenageDocument13 pagesEngrenagebottiotherPas encore d'évaluation
- Engrenage Droit PDFDocument3 pagesEngrenage Droit PDFBadr HadriPas encore d'évaluation
- Doc1-Transmission Par EngrenageDocument26 pagesDoc1-Transmission Par EngrenageJã Wād SnüPas encore d'évaluation
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfMohamed Hammi GmpPas encore d'évaluation
- Cours Engrenages LvesDocument5 pagesCours Engrenages LvesNathalie GarreauPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFJesuis ContentPas encore d'évaluation
- GM3 EngrenagesDocument94 pagesGM3 Engrenagesghourabisarra8Pas encore d'évaluation
- 03-Engrenages-Etude CinematiqueDocument13 pages03-Engrenages-Etude CinematiqueSerge bonel DafonsecaPas encore d'évaluation
- EDM2 Chap4Document19 pagesEDM2 Chap4Mohamed GrinePas encore d'évaluation
- TP Reducteur But GMP1 S2Document10 pagesTP Reducteur But GMP1 S2StringdeGuerrePas encore d'évaluation
- EngrenageDocument3 pagesEngrenageAbderrazak MiassarPas encore d'évaluation
- Caractéristiques Des Engrenages Droits CylindriquesDocument4 pagesCaractéristiques Des Engrenages Droits CylindriquesMinh-Duc DOPas encore d'évaluation
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- 33 EngrenagesDocument11 pages33 EngrenagesetalibPas encore d'évaluation
- nrc015 Transmission Puissance EngrenagesDocument4 pagesnrc015 Transmission Puissance EngrenagesStephane BaribPas encore d'évaluation
- TP Engrenages 1 - V1 - 2017 - 2018Document8 pagesTP Engrenages 1 - V1 - 2017 - 2018IMANE LOLPas encore d'évaluation
- Transmission de Puissance Par Engrenages TTDocument21 pagesTransmission de Puissance Par Engrenages TTTakii TfkPas encore d'évaluation
- Cycle2 Engrenages v4Document8 pagesCycle2 Engrenages v4kupoalorchristian1Pas encore d'évaluation
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfAhmed AlouiPas encore d'évaluation
- Examen1 Notion Déléments de MachinesDocument4 pagesExamen1 Notion Déléments de MachinesTech KingPas encore d'évaluation
- Formulaire de Mecanique PDFDocument11 pagesFormulaire de Mecanique PDFsldwPas encore d'évaluation
- Exercice Corrigés D'engrenages - Construction MécaniqueDocument7 pagesExercice Corrigés D'engrenages - Construction MécaniqueEmmanuel TchouyaPas encore d'évaluation
- Transmetteurs de PuissanceDocument11 pagesTransmetteurs de Puissancegildas assoumou allogoPas encore d'évaluation
- PROJET MECANIQUE EXEMPLE PFDDocument8 pagesPROJET MECANIQUE EXEMPLE PFDHedi MirandaPas encore d'évaluation
- Transmetteurs 2Document7 pagesTransmetteurs 2jiahnPas encore d'évaluation
- Trains Engrenages - ProfesseurDocument10 pagesTrains Engrenages - ProfesseurbauvinprofPas encore d'évaluation
- Les carnets de construction et vol du cerf-volant: envie de voler plus hautD'EverandLes carnets de construction et vol du cerf-volant: envie de voler plus hautÉvaluation : 5 sur 5 étoiles5/5 (1)
- LN ExpDocument8 pagesLN ExpAlphaPas encore d'évaluation
- Exercice 1:: Partie I: Les Réponses Aux Questions Des Deux Exercices Sont ObligatoiresDocument2 pagesExercice 1:: Partie I: Les Réponses Aux Questions Des Deux Exercices Sont ObligatoiresElisa Ger100% (1)
- Nouveau Guide Du Beton - Dreux (19188)Document161 pagesNouveau Guide Du Beton - Dreux (19188)Gisèle Mukembe NSIANGANIPas encore d'évaluation
- Le Monde Diplomatique 2014 12Document28 pagesLe Monde Diplomatique 2014 12SebastienHoratioKialikiPas encore d'évaluation
- LoveDocument4 pagesLoveassadabdi71Pas encore d'évaluation
- Reseaux HT TDDocument6 pagesReseaux HT TDPUMA100% (1)
- ElectionDocument58 pagesElectionSerigne Saliou DionguePas encore d'évaluation
- rajaonarisonNirinaR ESPA MAST 21 SPAHDocument96 pagesrajaonarisonNirinaR ESPA MAST 21 SPAHRatovoarisoaPas encore d'évaluation
- HP EliteBook 820 G1Document114 pagesHP EliteBook 820 G1Christian AlbertiniPas encore d'évaluation
- Chapitre III: Transmittance Ou Fonction de Transfert D'un Système LinéaireDocument4 pagesChapitre III: Transmittance Ou Fonction de Transfert D'un Système LinéaireBouzid Mohamed CherifPas encore d'évaluation
- 3 La Parabole Du SemeurDocument7 pages3 La Parabole Du SemeurIsabela VasconceloPas encore d'évaluation
- MANDATS Gonaives Coopératives Scolaires 315 318 319 320Document4 pagesMANDATS Gonaives Coopératives Scolaires 315 318 319 320SaidEtebbaiPas encore d'évaluation
- Sec 52 QsgengDocument29 pagesSec 52 Qsgengtaiwa1 1Pas encore d'évaluation
- Pillet SOLEIL 2014Document97 pagesPillet SOLEIL 2014SIAKA OuattaraPas encore d'évaluation
- Avis Bon CommandeDocument4 pagesAvis Bon Commandezak.sb22Pas encore d'évaluation
- TD MicroprocesseurDocument6 pagesTD MicroprocesseurtchoudjafandjaPas encore d'évaluation
- Jonnesway Outillage-CatalogoFR2017.compressed PDFDocument170 pagesJonnesway Outillage-CatalogoFR2017.compressed PDFconstantine.cherifPas encore d'évaluation
- Securité - Hatem BettaherDocument52 pagesSecurité - Hatem BettaherSonia REZKPas encore d'évaluation
- Manuel D'utilisation Du GEVASCODocument18 pagesManuel D'utilisation Du GEVASCOHervé HollardPas encore d'évaluation
- Promenades-2020 CharleroiDocument28 pagesPromenades-2020 CharleroiLu LarPas encore d'évaluation
- Komilkiw Musique Et Performance SportiveDocument6 pagesKomilkiw Musique Et Performance SportiveKamel IfrahPas encore d'évaluation
- E I RachialgiesDocument20 pagesE I RachialgiesMohamed Aziz BaltiPas encore d'évaluation
- Section 1Document3 pagesSection 1Imane MegzariPas encore d'évaluation
- Reeducation Raideur CoudeDocument11 pagesReeducation Raideur CoudeJedidi AmirPas encore d'évaluation