Vous aimerez peut-être aussi
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Résumé Module Introduction Aux Sciences Politique Version 1Document11 pagesRésumé Module Introduction Aux Sciences Politique Version 1chamseddine karafi75% (4)
- Cours Les Engr Dentu DroitesDocument10 pagesCours Les Engr Dentu Droitesben 10Pas encore d'évaluation
- Cours Engrenage+Train Epicycloidal+DifférentielDocument54 pagesCours Engrenage+Train Epicycloidal+DifférentielCrazy yt100% (1)
- Cours Les Engr DentuDocument11 pagesCours Les Engr DentuKader HoumitaPas encore d'évaluation
- Définitions, Terminologie Et Symboles Normalisés ISODocument1 pageDéfinitions, Terminologie Et Symboles Normalisés ISOMAMI RAKOTOMAHANINAPas encore d'évaluation
- Cours Engrenages 2016Document12 pagesCours Engrenages 2016Imed Elhaj100% (1)
- Qu'est-Ce Qu'un Engrenage ?: 1. FonctionDocument7 pagesQu'est-Ce Qu'un Engrenage ?: 1. FonctionntayoubPas encore d'évaluation
- 15 Transmission de Puissance Par EngrenagesDocument14 pages15 Transmission de Puissance Par Engrenageszouhour brahmiPas encore d'évaluation
- Engrenages ConiquesDocument3 pagesEngrenages ConiquesAmine IsaAdPas encore d'évaluation
- Doc1-Transmission Par EngrenageDocument26 pagesDoc1-Transmission Par EngrenageJã Wād SnüPas encore d'évaluation
- Transmission de Puissance Par Engrenages TTDocument21 pagesTransmission de Puissance Par Engrenages TTTakii TfkPas encore d'évaluation
- Transmission de MouvementDocument111 pagesTransmission de Mouvementboujbal100% (2)
- Les EngrenagesDocument10 pagesLes Engrenagesassane ndiayePas encore d'évaluation
- Chap-3 Transmission de Puissance Par EngrenagesDocument14 pagesChap-3 Transmission de Puissance Par EngrenagesChokri AtefPas encore d'évaluation
- Engrenages-Converti 2Document22 pagesEngrenages-Converti 2kk2577756Pas encore d'évaluation
- ENGRENAGESDocument10 pagesENGRENAGESBojane100% (2)
- Engrenages 1Document7 pagesEngrenages 1Mohamed LaliouiPas encore d'évaluation
- Cours EngrenageDocument18 pagesCours Engrenageabdenafaa17Pas encore d'évaluation
- Chapitre 5 Transmission Puissance EngrenagesDocument14 pagesChapitre 5 Transmission Puissance EngrenagesDhaouadi AymenPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenagesAhmedPas encore d'évaluation
- EngrenageDocument13 pagesEngrenagebottiotherPas encore d'évaluation
- I-Adapter Un Movement de Rotation: T CoursDocument5 pagesI-Adapter Un Movement de Rotation: T Coursnaceur rbiiPas encore d'évaluation
- Les EngrenagesDocument10 pagesLes Engrenagessouheil_souPas encore d'évaluation
- 2 EngrenagesDocument10 pages2 EngrenagesZakaria NaouiPas encore d'évaluation
- Diapo Engrenage Du 04 Juin 2020Document23 pagesDiapo Engrenage Du 04 Juin 2020Abi ClémentPas encore d'évaluation
- 11 MECA0444-Gear1Document100 pages11 MECA0444-Gear1rodnain MourePas encore d'évaluation
- Transmetteurs de PuissanceDocument11 pagesTransmetteurs de Puissancegildas assoumou allogoPas encore d'évaluation
- Engrenage Prof PDFDocument5 pagesEngrenage Prof PDFSoufiane ArquímedesPas encore d'évaluation
- Trans de MVT Cours 2Document17 pagesTrans de MVT Cours 2Anonymous LZQTDsB95APas encore d'évaluation
- Chap 1 Engrenages PDFDocument9 pagesChap 1 Engrenages PDFJeremie Ivann NGOYEPas encore d'évaluation
- Cours Des Engrenages N°1Document26 pagesCours Des Engrenages N°1O'zSamaPas encore d'évaluation
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- 33 EngrenagesDocument11 pages33 EngrenagesetalibPas encore d'évaluation
- Menu:: M21 Ch4: Les EngrenagesDocument11 pagesMenu:: M21 Ch4: Les EngrenagesYassine HnadaPas encore d'évaluation
- Correction de DentureDocument5 pagesCorrection de DenturetopjobPas encore d'évaluation
- Engrenages Droits Denture HelicoidaleDocument4 pagesEngrenages Droits Denture HelicoidaleMohamed ElbaghdadiPas encore d'évaluation
- TransmissionDocument10 pagesTransmissionSlah TounsiPas encore d'évaluation
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDocument2 pagesChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebPas encore d'évaluation
- Caractéristiques Des Engrenages Droits CylindriquesDocument4 pagesCaractéristiques Des Engrenages Droits CylindriquesMinh-Duc DOPas encore d'évaluation
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- Chap 1 EngrenagesDocument8 pagesChap 1 EngrenagesMouhamed Rassoul GueyePas encore d'évaluation
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenagesOussama BkPas encore d'évaluation
- Cours CM2Document33 pagesCours CM2bouslimane idirPas encore d'évaluation
- Transmission de Puissance PDFDocument59 pagesTransmission de Puissance PDFsamah drissi el bouzaidiPas encore d'évaluation
- EDM2 Chap4Document19 pagesEDM2 Chap4Mohamed GrinePas encore d'évaluation
- Cours Des Engrenages SimplifiéDocument23 pagesCours Des Engrenages SimplifiéSouhayle LamrabetPas encore d'évaluation
- EngrenageDocument3 pagesEngrenageInteg StiPas encore d'évaluation
- Présentation Cours Engrenages 2016-2017 PDFDocument65 pagesPrésentation Cours Engrenages 2016-2017 PDFMouaad AlouaniPas encore d'évaluation
- TP 03 EngrenagesDocument13 pagesTP 03 EngrenagesAli MaansriPas encore d'évaluation
- Cours Partie 2Document5 pagesCours Partie 2soumeyaPas encore d'évaluation
- 02AC10 - Cours Transmission de Puissance - ProfDocument10 pages02AC10 - Cours Transmission de Puissance - ProfSewa MensahPas encore d'évaluation
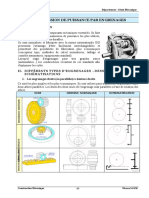
- Doc2 Ressourcetransmission MécaniqueDocument7 pagesDoc2 Ressourcetransmission Mécaniquenaceur rbiiPas encore d'évaluation
- Les carnets de construction et vol du cerf-volant: envie de voler plus hautD'EverandLes carnets de construction et vol du cerf-volant: envie de voler plus hautÉvaluation : 5 sur 5 étoiles5/5 (1)
- These A YOCHUM Maxime 2013Document180 pagesThese A YOCHUM Maxime 2013ghourabisarra8Pas encore d'évaluation
- Membres Fantômes.Document233 pagesMembres Fantômes.nanaquiPas encore d'évaluation
- Kherbouche Souhila, Moussaoui ChafiaDocument145 pagesKherbouche Souhila, Moussaoui ChafiaOussama El HjoujiPas encore d'évaluation
- GuideDocument20 pagesGuideghourabisarra8Pas encore d'évaluation
- Belhenini Soufyane Cours Materiaux CompositesDocument86 pagesBelhenini Soufyane Cours Materiaux CompositesLéon PoatyPas encore d'évaluation
- Cours Matlab StochastiqueDocument45 pagesCours Matlab StochastiqueAmine HamdouchiPas encore d'évaluation
- VOIR Marche Du Bois 2020Document204 pagesVOIR Marche Du Bois 2020Bcd CdePas encore d'évaluation
- Exigences Norme ISO 45001.Document1 pageExigences Norme ISO 45001.Boubacar MbowPas encore d'évaluation
- TD HacheurDocument3 pagesTD HacheurNarutoPas encore d'évaluation
- 151 - Fiche de Poste Agent Etat Civil n7-2Document1 page151 - Fiche de Poste Agent Etat Civil n7-2Badreddine EssaidiPas encore d'évaluation
- Contribution VFO MEPDocument18 pagesContribution VFO MEPvendezioPas encore d'évaluation
- Euro Compliance Peugeot MetropolisDocument58 pagesEuro Compliance Peugeot MetropolisJeff EllorincoPas encore d'évaluation
- N° Titre de L'ouvrage Auteur Encadreur Date: OEC Liste Des MémoiresDocument56 pagesN° Titre de L'ouvrage Auteur Encadreur Date: OEC Liste Des MémoiresSirine JabesPas encore d'évaluation
- Demarreurs Pannes Synthèse H ODocument18 pagesDemarreurs Pannes Synthèse H ONasredine AlainPas encore d'évaluation
- Tavaux Dirigés SoutienDocument9 pagesTavaux Dirigés SoutienOumarou Hamissou50% (2)
- Ee Industrie Amee Module 3 PDFDocument26 pagesEe Industrie Amee Module 3 PDFDjebbar AliPas encore d'évaluation
- M13-Technique de Vente OFPPT Par WWW - Ofppt1.blogspot - Com - 2Document43 pagesM13-Technique de Vente OFPPT Par WWW - Ofppt1.blogspot - Com - 2YoussefKemlanePas encore d'évaluation
- Ed 7200Document2 pagesEd 7200MahjoubPas encore d'évaluation
- DevoirDocument2 pagesDevoirmohammed boufenziPas encore d'évaluation
- Dictionnaireduweb Edition2015Document866 pagesDictionnaireduweb Edition2015Loic BastaraudPas encore d'évaluation
- Exposes Ligne ElectriqueDocument23 pagesExposes Ligne ElectriqueHabibe DJOMAKONPas encore d'évaluation
- ExercicesDocument3 pagesExercicesassia.bouhssiniPas encore d'évaluation
- Examinateur: NGUEMETIA. FEUPI CYRILLE (PLEG Physique)Document2 pagesExaminateur: NGUEMETIA. FEUPI CYRILLE (PLEG Physique)Ibrahim OuarePas encore d'évaluation
- Ifrs Introduction Aux Concepts de BaseDocument350 pagesIfrs Introduction Aux Concepts de BaseSoumia BenrkiaPas encore d'évaluation
- Catálogo de Motores STMDocument238 pagesCatálogo de Motores STMSergio Nogales ZambranaPas encore d'évaluation
- Etapes de Deroulement Dun Programme de Sondage PDFDocument48 pagesEtapes de Deroulement Dun Programme de Sondage PDFOutman BenaouissPas encore d'évaluation
- ISO 9202 2014-Character PDF DocumentDocument10 pagesISO 9202 2014-Character PDF DocumentHocine Chelghoum0% (1)
- Invitation Biomr SimemDocument4 pagesInvitation Biomr SimemKhadidja BensmainePas encore d'évaluation
- Aviation Pilote 587Document84 pagesAviation Pilote 587laurent jubeau0% (1)
- Dictionnaire de DonnéeDocument1 pageDictionnaire de Donnéejean5no5l5kangaPas encore d'évaluation
- Délais Et FormalitésDocument1 pageDélais Et Formalitészzouitine7220Pas encore d'évaluation
- PlaquetteSMDC PLVDocument16 pagesPlaquetteSMDC PLVAMALLLLLLLPas encore d'évaluation
- Jeux Et Paris GagnantDocument8 pagesJeux Et Paris Gagnantmichael baileyPas encore d'évaluation
- Programme CNFCCP - Talent ManagementDocument1 pageProgramme CNFCCP - Talent ManagementMoufid KarrayPas encore d'évaluation
- Exposé de RouteDocument40 pagesExposé de RouteNaomie NdongPas encore d'évaluation