Vous aimerez peut-être aussi
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Présentation Cours Engrenages - Doc ProfDocument8 pagesPrésentation Cours Engrenages - Doc ProfNedrosat89% (9)
- Les Engrenages (Cours Bac)Document2 pagesLes Engrenages (Cours Bac)MIMFS86% (43)
- Transmission de Puissamce PDFDocument82 pagesTransmission de Puissamce PDFkhocine75% (4)
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- 01 Résumé TransmettreDocument27 pages01 Résumé Transmettrephy100% (2)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleKhadija Labrizi80% (5)
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- Guidage en Rotation Par Roulements (BT Et KB)Document6 pagesGuidage en Rotation Par Roulements (BT Et KB)MIMFS67% (12)
- Trains EngrenageDocument9 pagesTrains Engrenagefouad80% (5)
- Système Robo YoupiDocument5 pagesSystème Robo YoupiWalid Fattoum100% (2)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had33% (3)
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
- Transmettre-2SMB Eleve 2014Document81 pagesTransmettre-2SMB Eleve 2014mdrougui100% (8)
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Unité Transmettre 1 STE - Partie 1Document68 pagesUnité Transmettre 1 STE - Partie 1Boulette Moulay Hfid67% (3)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Application 2 ExtrudeuseDocument2 pagesApplication 2 ExtrudeuseHamada Hamada100% (1)
- CHAPITRE 6 - Les EngrenagesDocument8 pagesCHAPITRE 6 - Les EngrenagesAnouar96% (23)
- Cotation FonctionnelleDocument16 pagesCotation FonctionnelleMIMFS90% (10)
- Cours ConceptionDocument59 pagesCours Conceptionsbenlatifa100% (4)
- Série D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHADocument24 pagesSérie D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHAElarbi Jaffel100% (3)
- CHAPITRE 1 - Liaisons MécaniquesDocument10 pagesCHAPITRE 1 - Liaisons MécaniquesAnouar100% (18)
- Guidage-En-Rotation-Exercices (8) - Page53 PDFDocument10 pagesGuidage-En-Rotation-Exercices (8) - Page53 PDFKhaled Mahjoub100% (2)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- Cours EngrenagesDocument10 pagesCours EngrenagesmouradPas encore d'évaluation
- Cours de 2STE TransmissionDocument40 pagesCours de 2STE TransmissionJeulin Marabou60% (5)
- Unité Transmettre 1 STE - Partie 2Document50 pagesUnité Transmettre 1 STE - Partie 2Boulette Moulay Hfid96% (24)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Cotation FonctionnelleDocument27 pagesCotation FonctionnelleOutmane Lakhlili100% (14)
- Transmission de Puissance Sans Modification de La Vitesse - 2Document12 pagesTransmission de Puissance Sans Modification de La Vitesse - 2lfadli88% (8)
- 13 9 TD - Transmission PDFDocument10 pages13 9 TD - Transmission PDFRanya ouherrouPas encore d'évaluation
- Pivot Cours 2010Document5 pagesPivot Cours 2010walidbhy100% (1)
- b13 Guidage en RotationDocument7 pagesb13 Guidage en Rotationncibm67% (3)
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- td2 EngrnagesDocument1 pagetd2 EngrnagesAmaniBarkawi100% (3)
- Fonction Assemblage (Les Assemblages Démontables)Document24 pagesFonction Assemblage (Les Assemblages Démontables)MIMFS85% (20)
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiPas encore d'évaluation
- Bride Hydraulique Avec CorrectionDocument3 pagesBride Hydraulique Avec Correctionguymgi79% (24)
- Guidage en Rotation Par Roulements (BC)Document9 pagesGuidage en Rotation Par Roulements (BC)MIMFS91% (11)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- CHAPITRE 5 - Calcul Des RoulementsDocument5 pagesCHAPITRE 5 - Calcul Des RoulementsAnouar100% (24)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Transformation Des MvtsDocument7 pagesTransformation Des MvtsYassine SariaPas encore d'évaluation
- Transmission de Puissance Avec Transformation de MouvementDocument19 pagesTransmission de Puissance Avec Transformation de MouvementPhil ČhrýstaĺPas encore d'évaluation
- Chapitre 3Document8 pagesChapitre 3Fatima FatimaPas encore d'évaluation
- Cours Trans MVT 2015Document4 pagesCours Trans MVT 2015Nabil Ouled AhmedPas encore d'évaluation
- 15 Transformation de MouvementDocument7 pages15 Transformation de MouvementMrnadhir Mecanique0% (1)
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriPas encore d'évaluation
- Cours Systeme de Transf MouvDocument6 pagesCours Systeme de Transf MouvlemsouguerPas encore d'évaluation
- Mecanisme de Transformation de Mouvement Systeme Vis EcrouDocument3 pagesMecanisme de Transformation de Mouvement Systeme Vis Ecrousahl silverPas encore d'évaluation
- Conception Mécanique - Les Systèmes de Transformation de MouvementDocument4 pagesConception Mécanique - Les Systèmes de Transformation de Mouvementrabah maherPas encore d'évaluation
- 3 3 Transformation MVT v4Document2 pages3 3 Transformation MVT v4Sofiene GuedriPas encore d'évaluation
- dcn3 3t2 Dispositif D Entrainement CorrectionDocument4 pagesdcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- Ci5 Transformation MVT v4Document2 pagesCi5 Transformation MVT v4hassankchPas encore d'évaluation
- Cour Complet Transmission AéronautiqueDocument32 pagesCour Complet Transmission Aéronautiquebink-simracingPas encore d'évaluation
- S304 Trans Avec Transformation de MVTPRDocument6 pagesS304 Trans Avec Transformation de MVTPRikram bouhadlaPas encore d'évaluation
- Guidage en Translation PDFDocument141 pagesGuidage en Translation PDFkharrat samir100% (1)
- TPDocument5 pagesTPAmel BrhPas encore d'évaluation
- Correction (Articulation en Porte À Faux) (Act 5-3)Document1 pageCorrection (Articulation en Porte À Faux) (Act 5-3)MIMFS67% (3)
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesMIMFS89% (19)
- Transformation Des Mvts ApplicationDocument4 pagesTransformation Des Mvts ApplicationMIMFS50% (2)
- Formulaire de MécaniqueDocument11 pagesFormulaire de MécaniqueMIMFS91% (11)
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- Chariot Micro Tour (Act 3-3)Document1 pageChariot Micro Tour (Act 3-3)MIMFS100% (1)
- Articulation en Porte À Faux (Act5-5)Document1 pageArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- Correction (Chariot Tour) (Act3-3)Document1 pageCorrection (Chariot Tour) (Act3-3)MIMFSPas encore d'évaluation
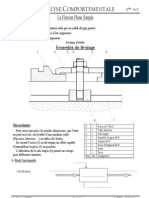
- La Flexion Plane Simple (Cours 3 SCT)Document4 pagesLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- Correction (Chariot Longitudinal) (Act 2-3)Document1 pageCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Document1 pageChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
- Poupée Mobile (Act 1-3)Document1 pagePoupée Mobile (Act 1-3)MIMFSPas encore d'évaluation
- Correction (Act1-3)Document1 pageCorrection (Act1-3)MIMFSPas encore d'évaluation
- Transmission (Annexe BAC)Document10 pagesTransmission (Annexe BAC)MIMFS100% (1)
- La Torsion Simple (Cours Bac)Document3 pagesLa Torsion Simple (Cours Bac)MIMFS82% (11)
- Les Embrayages Et Les FreinsDocument4 pagesLes Embrayages Et Les FreinsMIMFS88% (17)
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
- Les Eléments StandardDocument6 pagesLes Eléments StandardMIMFS100% (1)
- Liaison Encastrement1Document14 pagesLiaison Encastrement1MIMFS100% (1)
- Application+Flexions+10 11Document2 pagesApplication+Flexions+10 11ntayoubPas encore d'évaluation
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Lecture D'un Dessin D'ensembleDocument3 pagesLecture D'un Dessin D'ensembleMIMFS92% (13)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Désignation Des MatériauxDocument5 pagesDésignation Des MatériauxMIMFS100% (8)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Ion Fonctionnelle D'un ProduitDocument17 pagesIon Fonctionnelle D'un ProduitMIMFS100% (1)
- Distribution BMNDocument19 pagesDistribution BMNqperfrdvPas encore d'évaluation
- Note de Service Camions: Liste de Contrôle ODocument26 pagesNote de Service Camions: Liste de Contrôle Omeyega noe serge100% (1)
- 306 Diesel HDIDocument40 pages306 Diesel HDIcubhw100% (4)
- Analyses Exc Volvo Mot 4-16 LitresDocument19 pagesAnalyses Exc Volvo Mot 4-16 LitresSaidi JalelPas encore d'évaluation
- B - Sujet Epreuve AdmissibiliteDocument49 pagesB - Sujet Epreuve AdmissibilitelinantPas encore d'évaluation
- Deutz-Fahr Série 5D VSF CVT (T4i) - v2Document30 pagesDeutz-Fahr Série 5D VSF CVT (T4i) - v2Derrien Enzo100% (1)
- Manuel Lombardini LGW 523 MpiDocument110 pagesManuel Lombardini LGW 523 Mpibenjamin.flcPas encore d'évaluation
- Manuel Atelier D2 55Document92 pagesManuel Atelier D2 55Olivier ORMANPas encore d'évaluation
- Moteur ThermiqueDocument14 pagesMoteur Thermiquefadi hajjiPas encore d'évaluation
- 2019 TECHNOLOGIE MOTEURS DIESEL CAT - PPT (Mode de Compatibilité)Document116 pages2019 TECHNOLOGIE MOTEURS DIESEL CAT - PPT (Mode de Compatibilité)loic100% (2)
- C4 Grand Picasso 2 L HDI DieselDocument34 pagesC4 Grand Picasso 2 L HDI DieselOlivier ParisPas encore d'évaluation
- Circuit D'air Injection Directe EssenceDocument3 pagesCircuit D'air Injection Directe EssenceLucas Sieuw100% (1)
- Technologie Auto 1-2Document49 pagesTechnologie Auto 1-2abdo taouririPas encore d'évaluation
- 125 TL FanticDocument143 pages125 TL FanticPhilippe LOUIZOSPas encore d'évaluation
- M201 - Manuel StagiaireDocument88 pagesM201 - Manuel StagiaireElassri MohamedPas encore d'évaluation
- Brochure Moteur Kribes PDFDocument90 pagesBrochure Moteur Kribes PDFMehdi BnmssdPas encore d'évaluation
- Moteur Diesel - Perfectionnement 2021 1Document32 pagesMoteur Diesel - Perfectionnement 2021 1Laurenne YaoPas encore d'évaluation
- Cours MécaniqueDocument95 pagesCours MécaniqueRédaElKhechabiPas encore d'évaluation
- Manuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEDocument64 pagesManuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEДориана КирчеваPas encore d'évaluation
- Moteur Diesel: CaractéristiquesDocument11 pagesMoteur Diesel: CaractéristiquesNicolas DuboisPas encore d'évaluation
- Compte Rndu de TP Moteur A Combustion InterneDocument11 pagesCompte Rndu de TP Moteur A Combustion InterneFayza Belkhoudir75% (4)
- Man108931 De. La XMDocument321 pagesMan108931 De. La XMdamienm49100% (1)
- Choix Du Traitement Thermique Des Matériaux Ferreux Pour L'aDocument16 pagesChoix Du Traitement Thermique Des Matériaux Ferreux Pour L'aImane KhammouriPas encore d'évaluation
- MR Mot k4mDocument75 pagesMR Mot k4mIslam CidPas encore d'évaluation
- Chapitre 3 Mécanismes À CAMES + Applications VETDocument18 pagesChapitre 3 Mécanismes À CAMES + Applications VETelking gingstars100% (1)
- Moteurs PerformancesDocument4 pagesMoteurs PerformancesddxPas encore d'évaluation
- 02 Constitution Du MoteurDocument21 pages02 Constitution Du MoteurDany Defossez-anceauxPas encore d'évaluation
- Notice Entretien MZ 125 RT v2.2 Schéma ÉlectriqueDocument191 pagesNotice Entretien MZ 125 RT v2.2 Schéma Électriquerichard kapilaPas encore d'évaluation
- Dépose Distribution-Culasse Renault Master II ZD3Document42 pagesDépose Distribution-Culasse Renault Master II ZD3Jonathan Boleto100% (2)
- 14-Fiche Tehnique PDFDocument4 pages14-Fiche Tehnique PDFsimpluokPas encore d'évaluation