Vous aimerez peut-être aussi
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
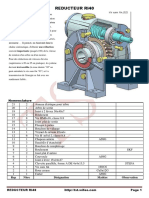
- Reducteur RI40Document6 pagesReducteur RI40watsop75% (4)
- Transformation de MVTDocument24 pagesTransformation de MVTMIMFS91% (11)
- TD 2 EngrenagesDocument4 pagesTD 2 EngrenagesPFEPas encore d'évaluation
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- AssemblagesDocument7 pagesAssemblagesAdouni ZakPas encore d'évaluation
- Cours EngrenagesDocument10 pagesCours EngrenagesmouradPas encore d'évaluation
- Série D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHADocument24 pagesSérie D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHAElarbi Jaffel100% (3)
- 31 EmbrayagesDocument12 pages31 EmbrayagesSimoMonkad100% (1)
- 10 Accouplements TemporairesDocument20 pages10 Accouplements Temporaireszouhour brahmi100% (1)
- 3 Exercice EngrenageDocument9 pages3 Exercice EngrenageDhibMohamed0% (2)
- Pivot Cours 2010Document5 pagesPivot Cours 2010walidbhy100% (1)
- Dossier Réponse CorrigéDocument5 pagesDossier Réponse CorrigéMrnadhir MecaniquePas encore d'évaluation
- Transmission de Puissamce PDFDocument82 pagesTransmission de Puissamce PDFkhocine75% (4)
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiPas encore d'évaluation
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Système Robo YoupiDocument5 pagesSystème Robo YoupiWalid Fattoum100% (2)
- 2 Acouplements PermenantsDocument10 pages2 Acouplements Permenantsmejri merin0% (1)
- Roulement BCDocument6 pagesRoulement BCOtman OtoPas encore d'évaluation
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- Guidage-En-Rotation-Exercices (8) - Page53 PDFDocument10 pagesGuidage-En-Rotation-Exercices (8) - Page53 PDFKhaled Mahjoub100% (2)
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiPas encore d'évaluation
- EPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)Document10 pagesEPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)etoumbe Alfred100% (2)
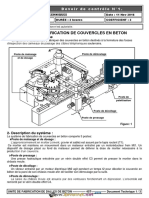
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- Cons Meca s3 1er GR 2017Document7 pagesCons Meca s3 1er GR 2017Simo Stit100% (1)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had33% (3)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 pagesCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFkhocine67% (6)
- TD TRAIN EpicycloidalesDocument2 pagesTD TRAIN EpicycloidalesIlyas MhammediPas encore d'évaluation
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Capteur PneumatiqueDocument6 pagesCapteur Pneumatiquemom bakkouch100% (1)
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Devoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesDevoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimMed Aymen Bensalem67% (3)
- 4-Les FreinsDocument13 pages4-Les FreinsChokri AtefPas encore d'évaluation
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- Act2 (Tendeur de Courroie) P218-224Document7 pagesAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouPas encore d'évaluation
- Révision Engrenage 2020Document15 pagesRévision Engrenage 2020Yosr Ben SaidPas encore d'évaluation
- Exercice Limiteur de Couple Transmissible ÉèveDocument2 pagesExercice Limiteur de Couple Transmissible Éèvemohamed1101Pas encore d'évaluation
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- Cours ConceptionDocument59 pagesCours Conceptionsbenlatifa100% (4)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFSofiane Redjradj100% (1)
- 2210192Document8 pages2210192Sofiene GuedriPas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- Corrigé TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument4 pagesCorrigé TD 19 - Lois Entrée-Sortie en Position Et en VitesseAhmed Farahidi100% (1)
- TD 22 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train ÉpicycloïdalDocument10 pagesTD 22 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train ÉpicycloïdalStephVitch50% (2)
- Corrige Bac-Technologique Etude-Des-constructions 2010 StielectechDocument7 pagesCorrige Bac-Technologique Etude-Des-constructions 2010 Stielectechspectrum66Pas encore d'évaluation
- 3453 Elements de Corrige Epreuve E11 Bac Pro CC 2013Document15 pages3453 Elements de Corrige Epreuve E11 Bac Pro CC 2013omardzstPas encore d'évaluation
- DS3 3Document7 pagesDS3 3Sami BennourPas encore d'évaluation
- 4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFDocument24 pages4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFMed Ali MaatougPas encore d'évaluation
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- DS1!12!13 4ST SOUSSE Complet Prod Pots MielDocument35 pagesDS1!12!13 4ST SOUSSE Complet Prod Pots Miellotfi75% (4)
- Académie de Paris - Démarches Déductive Et InductiveDocument2 pagesAcadémie de Paris - Démarches Déductive Et InductiveKhadija LabriziPas encore d'évaluation
- Demarche Pedagogique PDFDocument14 pagesDemarche Pedagogique PDFKhadija Labrizi100% (1)
- Fab CoursDocument20 pagesFab CoursELMustaphaELMoukhtariPas encore d'évaluation
- TDchainonsDocument1 pageTDchainonsKhadija LabriziPas encore d'évaluation
- Mi Iv 321 A PDFDocument9 pagesMi Iv 321 A PDFKhadija LabriziPas encore d'évaluation
- MRPDocument6 pagesMRPdoubePas encore d'évaluation
- F2 Les UsinagesDocument5 pagesF2 Les UsinagesYoussef FathPas encore d'évaluation
- 239 08-2 Exercices de Lecture de SpecificationsDocument3 pages239 08-2 Exercices de Lecture de SpecificationsKhadija LabriziPas encore d'évaluation
- Capteur PneumatiqueDocument1 pageCapteur PneumatiqueKhadija Labrizi100% (1)
- BorneDocument3 pagesBorneAziz AmtdiPas encore d'évaluation
- Isostatisme (Partie1) ReDocument4 pagesIsostatisme (Partie1) Re0001fredPas encore d'évaluation
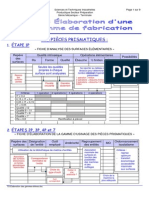
- TD Elaboration Des GammesDocument9 pagesTD Elaboration Des GammesKhadija Labrizi100% (1)
- Implant Outils v24wDocument25 pagesImplant Outils v24wKhadija LabriziPas encore d'évaluation
- 8 Exercices Lecture Specifications 2Document33 pages8 Exercices Lecture Specifications 2Khadija LabriziPas encore d'évaluation
- MipmaprempliDocument8 pagesMipmaprempliKhadija LabriziPas encore d'évaluation
- Mip MapDocument3 pagesMip MapKhadija LabriziPas encore d'évaluation
- Couple Outil-Piece 3Document4 pagesCouple Outil-Piece 3Mohamed Abed100% (1)
- VSOMFT Formation Vmware Vsphere With Operations Management Fast Track PDFDocument3 pagesVSOMFT Formation Vmware Vsphere With Operations Management Fast Track PDFCertyouFormationPas encore d'évaluation
- FICHE TD Etat MoteurDocument12 pagesFICHE TD Etat MoteurFakhreddine Ben MhenniPas encore d'évaluation
- Document RéponseDocument9 pagesDocument RéponseOxitrone [ӾøŁ]Pas encore d'évaluation
- Abs R19 16SDocument5 pagesAbs R19 16SHichamRabanePas encore d'évaluation
- D 19 Wide p4x2 Bom 320e6Document8 pagesD 19 Wide p4x2 Bom 320e6El Mehdi JeddadPas encore d'évaluation
- Ds Topographie 1GC Iset Nabeul 2012Document3 pagesDs Topographie 1GC Iset Nabeul 2012Soulaima Seddiki100% (1)
- Manuel Pour Pompe HaywardDocument12 pagesManuel Pour Pompe HaywardYannick RainvillePas encore d'évaluation
- La Toiture VégétaliséeDocument4 pagesLa Toiture Végétaliséeglynis100% (1)
- Guide Exploitation FR2Document13 pagesGuide Exploitation FR2zouhairabdelatif100% (1)
- Rapport Devoir 2Document8 pagesRapport Devoir 2line caulfutyPas encore d'évaluation
- 4 Formule BruteDocument2 pages4 Formule BruteNajib Nouisser100% (2)
- Document 11Document10 pagesDocument 11JamsePas encore d'évaluation
- Tunnel - 4 Note de Calcul PDFDocument56 pagesTunnel - 4 Note de Calcul PDFGhani LrPas encore d'évaluation
- Bu 3 Flambage v2Document5 pagesBu 3 Flambage v2Klolay Bledja Cyntiche AllaPas encore d'évaluation
- 11-Guide de Menuiserie PDFDocument50 pages11-Guide de Menuiserie PDFBENSAAOUD100% (4)
- 4 Tassements Et Consolidations PDFDocument14 pages4 Tassements Et Consolidations PDFadsinnatePas encore d'évaluation
- 9 DTDocument38 pages9 DTAbdellah OUAHIDI100% (1)
- SDM TPDocument7 pagesSDM TPGOUAL SaraPas encore d'évaluation
- Lettre Motivation Dut Informatique 5Document2 pagesLettre Motivation Dut Informatique 5Stephane LoePas encore d'évaluation
- Catalogue SanoTek RetailDocument8 pagesCatalogue SanoTek RetailEssamoual MohamedPas encore d'évaluation
- SDF MaintenanceDocument151 pagesSDF MaintenanceNour Imane100% (1)
- TL TD02Document2 pagesTL TD02NoureddineRmilaPas encore d'évaluation
- Drainage AgricoleDocument21 pagesDrainage AgricoleMamadou lamine CamaraPas encore d'évaluation
- Rapport de STDocument35 pagesRapport de STX HunterPas encore d'évaluation
- PresseDocument70 pagesPresseMalcolm EmilePas encore d'évaluation
- SchematisationDocument16 pagesSchematisationfaridPas encore d'évaluation
- Manual PewagDocument60 pagesManual Pewagmrpt2015Pas encore d'évaluation
- Martin LudovicDocument54 pagesMartin LudovicLoubna MiagePas encore d'évaluation
- These Dupuy 2008Document203 pagesThese Dupuy 2008Jihen BoukadidaPas encore d'évaluation
- Evaluation Des Risques Industriels PDFDocument2 pagesEvaluation Des Risques Industriels PDFMonicaPas encore d'évaluation