Vous aimerez peut-être aussi
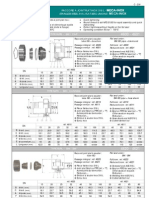
- Produit RaccordDocument22 pagesProduit RaccordAnonymous NonQwK3qL2Pas encore d'évaluation
- Rapport de StageDocument36 pagesRapport de StageMouad BalbalPas encore d'évaluation
- Simulateurs de ProcédésDocument61 pagesSimulateurs de ProcédésDarine Mahfouf Ep Bouchareb83% (12)
- Conception des systèmes - Pilotage, informations et risques: Méthode "Maze", une méthode pour sortir du labyrinthe de la complexitéD'EverandConception des systèmes - Pilotage, informations et risques: Méthode "Maze", une méthode pour sortir du labyrinthe de la complexitéPas encore d'évaluation
- Serie N°2 - Cinématique Des FluidesDocument10 pagesSerie N°2 - Cinématique Des FluidesJasmine Yasmine100% (4)
- Présentation Détaillée Nouvelle NFC 15 100-30-07-02-W2Document34 pagesPrésentation Détaillée Nouvelle NFC 15 100-30-07-02-W2Yacine MezianiPas encore d'évaluation
- SysML CoursDocument14 pagesSysML CourssedmorabetPas encore d'évaluation
- Hydraulique ProjetDocument12 pagesHydraulique Projetrocceli nzoulou100% (1)
- Glossaire Matériaux CompositesDocument34 pagesGlossaire Matériaux CompositesYoussef Khali100% (1)
- LTM 1090/1 - Porteur UW-01: Table Des MatièresDocument28 pagesLTM 1090/1 - Porteur UW-01: Table Des MatièresncirPas encore d'évaluation
- Livret TD - TP Pac - Version Corrigee - Janvier 2019Document46 pagesLivret TD - TP Pac - Version Corrigee - Janvier 2019Stéphane HuguetPas encore d'évaluation
- RA Rem Placement Des Arbres À Cames (M57)Document13 pagesRA Rem Placement Des Arbres À Cames (M57)api-376596367% (3)
- Cours de ModélisationDocument33 pagesCours de ModélisationHadjer zitPas encore d'évaluation
- Simulation COURSDocument19 pagesSimulation COURSHadjer zitPas encore d'évaluation
- These GSirin 2015Document203 pagesThese GSirin 2015wafabouzid23kPas encore d'évaluation
- These 50376 2015 MeguettaDocument150 pagesThese 50376 2015 MeguettadocalasPas encore d'évaluation
- Rapport Hicham BelhadaouiDocument171 pagesRapport Hicham BelhadaouiYoussef AssouiPas encore d'évaluation
- GL Kolski Ezzedine 2003PDFDocument15 pagesGL Kolski Ezzedine 2003PDFzaki nygmaPas encore d'évaluation
- DM N 1 HsiDocument7 pagesDM N 1 HsiABAR RaniaPas encore d'évaluation
- Dynamic Sustainable Cellular ManufacturingDocument161 pagesDynamic Sustainable Cellular ManufacturingJeromePas encore d'évaluation
- DM N 1 HsiDocument8 pagesDM N 1 HsiABAR RaniaPas encore d'évaluation
- Evaluation Des Interfaces Homme-Machine Lors Du deDocument23 pagesEvaluation Des Interfaces Homme-Machine Lors Du deSOUKAINA GHAZALIPas encore d'évaluation
- De Lanalyse Preliminaire de Risque Au Systeme DaDocument10 pagesDe Lanalyse Preliminaire de Risque Au Systeme DampekPas encore d'évaluation
- Ingénierie Et Intégration de Systèmes: L'auteurDocument6 pagesIngénierie Et Intégration de Systèmes: L'auteurCheikh Tidiane DioufPas encore d'évaluation
- 1SI SysML 1.1+1.2Document16 pages1SI SysML 1.1+1.2lkmkmlkPas encore d'évaluation
- Chapitre1 - InTRODUCTION (Construction Mécanique)Document8 pagesChapitre1 - InTRODUCTION (Construction Mécanique)ayari rayanePas encore d'évaluation
- PapierGI2007 AlouiChapurlat VersionFinaleDocument12 pagesPapierGI2007 AlouiChapurlat VersionFinaleAliou SouanePas encore d'évaluation
- 1SI - CI00 SysMLDocument4 pages1SI - CI00 SysMLEman BchPas encore d'évaluation
- LM16 INERIS Florent Brissaud ElectroDocument9 pagesLM16 INERIS Florent Brissaud ElectroFadwaPas encore d'évaluation
- Formalisation de La D Emarche de Conception D'un Syst' Eme de Production Mobile: Int Egration Des Concepts de Mobilit e Et de Reconfigurabilit eDocument343 pagesFormalisation de La D Emarche de Conception D'un Syst' Eme de Production Mobile: Int Egration Des Concepts de Mobilit e Et de Reconfigurabilit eandralita2767Pas encore d'évaluation
- Rapport HICHAM BELHADAOUIDocument172 pagesRapport HICHAM BELHADAOUIRed1 sharePas encore d'évaluation
- 2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceDocument11 pages2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceAhmed IdiPas encore d'évaluation
- RIHM Moussa Riahi Kolski 2006PDFDocument36 pagesRIHM Moussa Riahi Kolski 2006PDFabakoura moussaPas encore d'évaluation
- UCBET SE2-Fiche DescriptiveDocument14 pagesUCBET SE2-Fiche DescriptiveBenotmane FaresPas encore d'évaluation
- These Mazouni Version ProvisoireDocument219 pagesThese Mazouni Version ProvisoirejeanmbadibPas encore d'évaluation
- Partie 1 ING1Document28 pagesPartie 1 ING1Bourezak CélinePas encore d'évaluation
- Innovation Produit Et Innovation OrganisDocument8 pagesInnovation Produit Et Innovation OrganisannahPas encore d'évaluation
- Article QUALITA2007Document8 pagesArticle QUALITA2007aminabrahmi983Pas encore d'évaluation
- Projet de Mémoire Du Master Recherche 1Document5 pagesProjet de Mémoire Du Master Recherche 1joseph leringPas encore d'évaluation
- 117783-Article Text-326416-1-10-20150602Document14 pages117783-Article Text-326416-1-10-20150602Ram RazPas encore d'évaluation
- Cours Final Étude Des SystèmesDocument25 pagesCours Final Étude Des Systèmessaritabenmessaoud2020Pas encore d'évaluation
- Memoire 2023 Matthieu FFDocument35 pagesMemoire 2023 Matthieu FFmatthieuPas encore d'évaluation
- Chapitre4 IngenierieLogicielDocument5 pagesChapitre4 IngenierieLogicielkingniarmelPas encore d'évaluation
- Evaluation de La Pertinence Dans Un Système de Recommandation Sémantique de Nouvelles ÉconomiquesDocument13 pagesEvaluation de La Pertinence Dans Un Système de Recommandation Sémantique de Nouvelles Économiquesb.sabiri6445Pas encore d'évaluation
- Bouraoui Et Al 2017 RedDocument5 pagesBouraoui Et Al 2017 RednaghmouPas encore d'évaluation
- Introduction À La Modélisation Des Systèmes MécatroniquesDocument29 pagesIntroduction À La Modélisation Des Systèmes Mécatroniquesrami elloniPas encore d'évaluation
- Objectifs Du Module:: Semestre: 6 Matière: Conférence 1Document10 pagesObjectifs Du Module:: Semestre: 6 Matière: Conférence 1fayssal.hcPas encore d'évaluation
- Biblio Graph I eDocument3 pagesBiblio Graph I eMaroua DidaPas encore d'évaluation
- Mosim 2008Document10 pagesMosim 2008jacques EDOHPas encore d'évaluation
- La Tracabilite Totale Des Supply Chains Concept EtDocument29 pagesLa Tracabilite Totale Des Supply Chains Concept EtAle Gue EscPas encore d'évaluation
- CIGI 2015 Submission 5Document9 pagesCIGI 2015 Submission 5BN CDH SDJPas encore d'évaluation
- Chimie Verte Groupe 6Document7 pagesChimie Verte Groupe 6yasser ouramdanePas encore d'évaluation
- LM22 COM FULL 482867 Tamara Oueidat 20200710 305613Document11 pagesLM22 COM FULL 482867 Tamara Oueidat 20200710 305613haitam lfridiPas encore d'évaluation
- Méthodologie de Conception D'un Produit MécatroniqueDocument6 pagesMéthodologie de Conception D'un Produit MécatroniqueZakarya BendahmanePas encore d'évaluation
- 2011 TH16775 Glattleider StephaneDocument93 pages2011 TH16775 Glattleider StephanefatiPas encore d'évaluation
- Resume CV Hassan Hammouri LAGEP UCBL1 CNRS v2009.11.30Document5 pagesResume CV Hassan Hammouri LAGEP UCBL1 CNRS v2009.11.30ramiyaminPas encore d'évaluation
- Flyer - Modelisation Par La Fiabilite CombinDocument13 pagesFlyer - Modelisation Par La Fiabilite CombinINFO TVPas encore d'évaluation
- METHNI Amira-2016Document242 pagesMETHNI Amira-2016Ouedraogo JeanPas encore d'évaluation
- Hyg Kertous AboubakrDocument106 pagesHyg Kertous Aboubakrimade daddaPas encore d'évaluation
- Conception Et Simulation DDocument3 pagesConception Et Simulation Dmoustafa soudaniPas encore d'évaluation
- Conception Et Simulation DDocument3 pagesConception Et Simulation Dmoustafa soudaniPas encore d'évaluation
- CPI L Elaboration D Un Tableau de Bord Pour L Amelioration Continue D Un SIHDocument11 pagesCPI L Elaboration D Un Tableau de Bord Pour L Amelioration Continue D Un SIHGreffina Dahana LouisPas encore d'évaluation
- Bouhaddou Imane 2015Document181 pagesBouhaddou Imane 2015PfePas encore d'évaluation
- TOKI - Patrick William 2023Document309 pagesTOKI - Patrick William 2023Boujair YounessPas encore d'évaluation
- Chapitre 1 IntroductionDocument8 pagesChapitre 1 IntroductionMourad MatmourPas encore d'évaluation
- Alain Bous CayrolDocument219 pagesAlain Bous CayrolSeVILLA8DzPas encore d'évaluation
- CPI 2011 - Plénière Jean-Yves BronDocument37 pagesCPI 2011 - Plénière Jean-Yves Bronoussama elhjoujiPas encore d'évaluation
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- LDocument4 pagesLAmi Zaki100% (1)
- 2022 09 11 01 25 32 - 09a31f84Document7 pages2022 09 11 01 25 32 - 09a31f84hamil.oumaima21Pas encore d'évaluation
- Serie 02 Corrigé Convection Tthms 2021 2022Document4 pagesSerie 02 Corrigé Convection Tthms 2021 2022Nabil MechouchePas encore d'évaluation
- Perspective IsométriqueDocument12 pagesPerspective IsométriqueRemy AwomoPas encore d'évaluation
- Séminaire Fours & Chaudieres (2006)Document79 pagesSéminaire Fours & Chaudieres (2006)Sarra BÉCHIRI100% (1)
- Elements de Construction Mixte - G. MasyDocument100 pagesElements de Construction Mixte - G. Masymathilde.jacques.94Pas encore d'évaluation
- 18 LachimieverteDocument17 pages18 Lachimievertehakimbil100% (1)
- ANJOS - Renovation en CollectifDocument12 pagesANJOS - Renovation en Collectifj_chichouPas encore d'évaluation
- Fiche 1 Leçon 1quelques Matériaux Utilisés Dans La Vie Quotidienne Prof - Abouelmajd (WWW - Pc1.ma)Document2 pagesFiche 1 Leçon 1quelques Matériaux Utilisés Dans La Vie Quotidienne Prof - Abouelmajd (WWW - Pc1.ma)mohamed aoubyPas encore d'évaluation
- ALROCDocument2 pagesALROCAnonymous xBi2FsBxPas encore d'évaluation
- Etude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielDocument37 pagesEtude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielenguerrandvaubyPas encore d'évaluation
- Fiche Technique Prise OPTIMADocument1 pageFiche Technique Prise OPTIMAalexPas encore d'évaluation
- Simulasi Karyawan 2022Document47 pagesSimulasi Karyawan 2022Andrew HadiPas encore d'évaluation
- Séries Chro InseaDocument116 pagesSéries Chro InseaEL Hafa AbdellahPas encore d'évaluation
- Ge Esa 2018Document16 pagesGe Esa 2018othmane mrichPas encore d'évaluation
- PHD PubliDocument182 pagesPHD PublimouadPas encore d'évaluation
- TP03 Pratique AOPDocument2 pagesTP03 Pratique AOPZain GaradiPas encore d'évaluation
- These Matthieu RauchDocument248 pagesThese Matthieu RauchBoutef El HachemiPas encore d'évaluation
- Polycopie Initiation Aux BiomateriauxDocument27 pagesPolycopie Initiation Aux BiomateriauxMohamed mePas encore d'évaluation
- TD 2 CorrigeDocument2 pagesTD 2 CorrigeIbrahimFaroukSolar100% (2)
- Vidéo Et Audio Sur IPDocument4 pagesVidéo Et Audio Sur IPINTTICPas encore d'évaluation
- Session 7 s1 Mohamed El Moctar Ould Taleb SnimDocument35 pagesSession 7 s1 Mohamed El Moctar Ould Taleb SnimargiPas encore d'évaluation