Vous aimerez peut-être aussi
- TP Pont en Treillis West Point Bridge ELEVE V3Document17 pagesTP Pont en Treillis West Point Bridge ELEVE V3NesboardPas encore d'évaluation
- Poutre ÉquationsDocument4 pagesPoutre Équationsiraoui jamal (Ebay)Pas encore d'évaluation
- POUTREDocument25 pagesPOUTREkevpatPas encore d'évaluation
- Flexion PDFDocument6 pagesFlexion PDFBoud ElhassanPas encore d'évaluation
- Formulaire de MecaniqueDocument1 pageFormulaire de MecaniquefarahidiahmedPas encore d'évaluation
- Flambement Par Torsion Et Par Flexion Torsion Les Informations A RetenirDocument4 pagesFlambement Par Torsion Et Par Flexion Torsion Les Informations A Retenirmoustafa hadj-doulaPas encore d'évaluation
- Examen CM IIDocument7 pagesExamen CM IIEl Mehdi El FadliPas encore d'évaluation
- Abaqus Prise en MainDocument8 pagesAbaqus Prise en MainDeghboudj SamirPas encore d'évaluation
- Ex Ef Matrice Raideur PoutreDocument3 pagesEx Ef Matrice Raideur Poutreipman99Pas encore d'évaluation
- 7 2-FlexionDocument34 pages7 2-FlexionMustapha Berami50% (2)
- Flexion (Matériau)Document21 pagesFlexion (Matériau)alki1982Pas encore d'évaluation
- Exo Chapitre 2 Contraintes Milieu ContinuDocument6 pagesExo Chapitre 2 Contraintes Milieu ContinuDjelloul ReziniPas encore d'évaluation
- Chapitre 5 Torsion SimpleDocument12 pagesChapitre 5 Torsion SimpleTech KingPas encore d'évaluation
- Chapitre 4 Cisaillement Simple PDFDocument9 pagesChapitre 4 Cisaillement Simple PDFnassimPas encore d'évaluation
- Structure MetalliqueDocument31 pagesStructure MetalliqueAnderson Jean DenisPas encore d'évaluation
- MSD 2Document29 pagesMSD 2Maroua LHPas encore d'évaluation
- Silo 3 GeometrieDocument9 pagesSilo 3 GeometrieOuarab WassimPas encore d'évaluation
- Modélisation MMC Et Calcul de L'épaisseur (Critère de Von Mises)Document18 pagesModélisation MMC Et Calcul de L'épaisseur (Critère de Von Mises)taoufikloukilPas encore d'évaluation
- Soudix AideDocument17 pagesSoudix Aidepalary18Pas encore d'évaluation
- Chapitre 6 Conception Construction Cours CM Chaaba 2018 - Les PannesDocument9 pagesChapitre 6 Conception Construction Cours CM Chaaba 2018 - Les PannesnadihPas encore d'évaluation
- Assemblages Par Boulons NormauxDocument9 pagesAssemblages Par Boulons NormauxbastophePas encore d'évaluation
- Calculs Assemblages Par Boulons HRDocument13 pagesCalculs Assemblages Par Boulons HRBilel KhanPas encore d'évaluation
- GCI 210 Résistance Des MatériauxDocument4 pagesGCI 210 Résistance Des Matériauxmarf1912Pas encore d'évaluation
- TD 4 Serie #4Document5 pagesTD 4 Serie #4Kader AmraouiPas encore d'évaluation
- Assemblage 4Document5 pagesAssemblage 4abdoPas encore d'évaluation
- Cticm Cmi 01 2018Document44 pagesCticm Cmi 01 2018Brice Patrice GollyPas encore d'évaluation
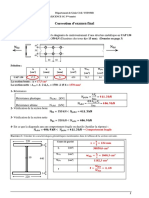
- Correction D'examen Final CMDocument2 pagesCorrection D'examen Final CMCara mellaPas encore d'évaluation
- CisaillementDocument2 pagesCisaillementTigerdoudzPas encore d'évaluation
- ChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 FinaleDocument23 pagesChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 Finaleramzi abidiPas encore d'évaluation
- Bu 4 Deversement v2Document8 pagesBu 4 Deversement v2kathanas1Pas encore d'évaluation
- Assemblages en CMDocument48 pagesAssemblages en CMPapa NdiayePas encore d'évaluation
- RDMDocument13 pagesRDMapi-52129327Pas encore d'évaluation
- Pied de Poteau ArticuleDocument4 pagesPied de Poteau ArticuleOmar_FSOPas encore d'évaluation
- Flexion DeviéeDocument13 pagesFlexion DeviéehassankchPas encore d'évaluation
- Charp Cour M08 CM - EXDocument10 pagesCharp Cour M08 CM - EXchaudronnierPas encore d'évaluation
- Module 08 Connaissance de La RDMDocument49 pagesModule 08 Connaissance de La RDMSAID EL KHATTABI100% (1)
- 6 Pieds de PoteauxDocument4 pages6 Pieds de Poteauxعہبد الہحہلہيہمPas encore d'évaluation
- 04 Cisaillement Simple PDFDocument15 pages04 Cisaillement Simple PDFcherquiPas encore d'évaluation
- Introduction GénéraleDocument53 pagesIntroduction GénéraleImen NinaPas encore d'évaluation
- DocumentDocument10 pagesDocumentDavid HoffmanPas encore d'évaluation
- Construction Métallique - 9Document21 pagesConstruction Métallique - 9Mehdi El HachimiPas encore d'évaluation
- RdmflexionDocument27 pagesRdmflexionqzm74l100% (1)
- Chapitre 3. Caractéristiques Géométriques Des Sections PlanesDocument12 pagesChapitre 3. Caractéristiques Géométriques Des Sections PlanesBakary KeitaPas encore d'évaluation
- Présentation Cours Engrenages 2016-2017 PDFDocument65 pagesPrésentation Cours Engrenages 2016-2017 PDFMouaad AlouaniPas encore d'évaluation
- Element Finis PDFDocument9 pagesElement Finis PDFAmine NaitPas encore d'évaluation
- C09a Guidage Par RoulementsDocument12 pagesC09a Guidage Par RoulementstopjobPas encore d'évaluation
- Poutres en TreillisDocument6 pagesPoutres en TreillisMedBng 22Pas encore d'évaluation
- Coupolefait 23Document16 pagesCoupolefait 23Jocelyn zienlet SOMDAPas encore d'évaluation
- TP 5Document10 pagesTP 5Nassib TarikPas encore d'évaluation
- Assemblage SoudéDocument8 pagesAssemblage SoudéFatih IlyezPas encore d'évaluation
- EngrenagesDocument21 pagesEngrenagesFatine Essafi0% (1)
- Exemple: Poutre Sur Appuis Simples Maintenue Latéralement Au Niveau Du Point D'application de La ChargeDocument11 pagesExemple: Poutre Sur Appuis Simples Maintenue Latéralement Au Niveau Du Point D'application de La ChargeAyyoubPas encore d'évaluation
- RMChap3 (Traction) Exemple SupDocument5 pagesRMChap3 (Traction) Exemple Supcephas Ntonkoka100% (1)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- TD3 Cine 2017Document2 pagesTD3 Cine 2017Zaineb AbbadPas encore d'évaluation
- MecaniqueDocument11 pagesMecaniqueDounia AlaouiPas encore d'évaluation
- Risque MécaniqueDocument6 pagesRisque MécaniqueAlarabi AraGuelmaPas encore d'évaluation
- Exercices Avec Solution Statique PDFDocument20 pagesExercices Avec Solution Statique PDFAlarabi AraGuelma100% (1)
- Ei PDFDocument166 pagesEi PDFAlarabi AraGuelmaPas encore d'évaluation
- Constit Du DossierDocument1 pageConstit Du DossierAlarabi AraGuelmaPas encore d'évaluation