GEII-1ère du second cycle AII
SALC
TP 02
Description du système
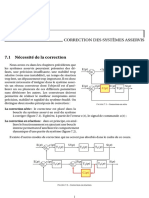
La figure 1 représente le schéma de principe de la régulation de niveau d'eau dans un réservoir. On
désire que celui-ci puisse suivre un niveau de consigne hc affichable par un potentiomètre Pe même
en présence de variation du débit d'utilisation Qu constituant la principale perturbation.
Pour cela, on propose un schéma de commande qui consiste d'appliquer une tension d'erreur Vc-
Vh, amplifiée par un amplificateur comparateur de gain K1, à un asservissement de position de la
vanne. Cet asservissement comporte un amplificateur de gain K2 qui alimente un moteur à courant
continu et à excitation indépendante et constante. En tournant, le moteur entraîne la tige de la
vanne par l'intermédiaire d'un réducteur ; ce qui permet l'ajustement du débit d'entrée Qe.
Figure 1 : Boucle de régulation de niveau
On donne les caractéristiques suivantes :
Réservoir : section de base S= 0.5m2 ; hmax= 1 m.
Potentiomètre de consigne Pe : gradué de 0 à hmax. La tension de sortie est proportionnelle
au niveau de consigne ; soit Vc=Kc hc avec Kc= 20 v/m.
𝑲
Moteur à cc : la fonction de transfert 𝑴(𝒑) = 𝒑(𝟏+𝑻𝒎 avec Km= 0.5 rd/s/v et Tm=0.1 s
𝒎 𝒑)
Potentiomètre de sortie Ps; capte la position angulaire et fournie une tension qui lui est
proportionnelle; soit Vm=Kp θm avec Kp= 1 v/rd.
𝜽 𝟏
Réducteur : le rapport de réduction 𝒓 = 𝜽 𝒓 = 𝟐𝟎
𝒎
Vanne : permet de fournir un débit q proportionnel à la positon angulaire réduite; soit Qe =
Kr θr avec Kr=0.1 m3/s/rd.
1
� Capteur de niveau : permet de fournir une tension Vh proportionnelle au niveau h ; soit
Vh=Kc h.
Partie théorique
1. Montrer que le réservoir peut être représenté par le schéma fonctionnel suivant :
Figure2 : modèle du réservoir
𝑑𝑉
Sachant que : le débit est la variation du volume, ie : =𝑄
𝑑𝑡
2. Compléter le schéma fonctionnel de l’installation suivant et nommer les signaux à l’entrée et la
sortie de chaque bloc.
Figure3 : Schéma fonctionnel de l’installation
3. Calculer la fonction de transfert en boucle fermée relative à la boucle d’asservissement de
position de la vanne (boucle interne).
4. Fixer une valeur de K2 de manière à ce que cette boucle ne présente pas de dépassement
transitoire (un coefficient d’amortissement =1)
5. La boucle interne est supposée réglée par la valeur K2 trouvée en 4. Calculer l’expression de la
𝑉ℎ
fonction de transfert en boucle ouverte 𝐻𝑏𝑜 =
𝑉𝑐
6. Déterminer l’expression de h(p) en considérant la boucle fermée et la mettre sous la forme
suivante : ℎ(𝑝) = 𝐻1 (𝑝) ℎ𝑐(𝑝) + 𝐻2 (𝑝) 𝑄𝑢(𝑝)
7. Sans perturbation (Qu =0), montrer que le niveau atteint, sans erreur, le niveau de consigne hc
supposé constant (échelon).
Simulation
1. Réaliser sur Simulink l’asservissement de position (la boucle interne uniquement). Prendre la
valeur de K2 calculée et vérifier le comportement transitoire souhaité. Evaluer le temps de
réponse à 5%.
2. Visualiser la réponse indicielle de ce système si on prend K’2< K2 et K’’2> K2, Quel est l’effet de
ces valeurs sur le régime transitoire ?
3. Compléter ce schéma pour réaliser la boucle de régulation de niveau.
2
�4. Visualiser les réponses indicielles en boucle ouverte puis en boucle fermée (Qu=0). Que
remarquez-vous ? (l’échelon d’entrée<hmax)
5. En prenant Qu = 0 et pour différentes valeurs de K1 (5, 10, 20, 50, 100), simuler la boucle fermée.
Que peut-on dire sur le comportement transitoire et le régime permanent ?
6. On choisit une valeur de K1 pour laquelle le comportement transitoire vous parait satisfaisant
sans toutefois que le niveau atteint pendant le régime transitoire ne dépasse pas le niveau hmax.
Provoquer une variation constante du débit d’utilisation (Qu) en décalant son application dans
le temps de manière à observer le comportement de la boucle en asservissement et en
régulation.
7. Vérifier que l’augmentation du gain K1 permet effectivement de réduire l’écart observé dû à la
perturbation. Qu’observe-t-on si on augmente excessivement ce gain ?