Vous aimerez peut-être aussi
- Process AciérieDocument6 pagesProcess Aciériesanae jaouiPas encore d'évaluation
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 pagesCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegPas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Prise en Main de Microsoft Office Excel 2016Document713 pagesPrise en Main de Microsoft Office Excel 2016max80% (5)
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- 0 B1 HAOWj KCF 5 KTL ZLC HBDNHVRZ3 CDocument8 pages0 B1 HAOWj KCF 5 KTL ZLC HBDNHVRZ3 CIMAD ABOUDRARPas encore d'évaluation
- BodeDocument28 pagesBodeVictor GuérinPas encore d'évaluation
- CI07 AD20 Corrigé - Régler La Commande Des SLCI Asservi À L'aide de Correcteur ProportionnelDocument8 pagesCI07 AD20 Corrigé - Régler La Commande Des SLCI Asservi À L'aide de Correcteur ProportionnelFaical BharPas encore d'évaluation
- Guide Pour Le Tracé D'un Diagramme de Bode: Étape 1Document1 pageGuide Pour Le Tracé D'un Diagramme de Bode: Étape 1Chrif ÀyOùbPas encore d'évaluation
- Exercices CorrigesDocument7 pagesExercices CorrigesFiroDjinsoNanoPas encore d'évaluation
- 6 6 Exo Sujet PDFDocument8 pages6 6 Exo Sujet PDFmohamedPas encore d'évaluation
- Cours CorrectionDocument9 pagesCours CorrectionAnas BoussettaPas encore d'évaluation
- 09 TD Corrigé - Evaluation Des Performances Des Systèmes Asservis - StabilitéDocument8 pages09 TD Corrigé - Evaluation Des Performances Des Systèmes Asservis - Stabilitéحميد خلفاويPas encore d'évaluation
- Correction AsservissmentDocument10 pagesCorrection AsservissmentbecemPas encore d'évaluation
- Automatique 1 - 20172018 - ZLI - 6Document39 pagesAutomatique 1 - 20172018 - ZLI - 6MOUMMOUPas encore d'évaluation
- Correction TD7 SADocument6 pagesCorrection TD7 SAHafssa Ait AmarPas encore d'évaluation
- Analyse FréquentielleDocument40 pagesAnalyse Fréquentiellefatima zahra benmeriemePas encore d'évaluation
- MEEA APhaseDocument3 pagesMEEA APhaseabderrahm harunPas encore d'évaluation
- TD StabiliteDocument6 pagesTD StabiliteLalaoui RabahPas encore d'évaluation
- TP (Electronique)Document16 pagesTP (Electronique)ZahirPas encore d'évaluation
- Performanes Des SLCI PDFDocument2 pagesPerformanes Des SLCI PDFilyass doukPas encore d'évaluation
- Analyse Et Commande Des Syst' Emes Lin Eaires: FR Ederic Gouaisbaut Et Soheib FerganiDocument39 pagesAnalyse Et Commande Des Syst' Emes Lin Eaires: FR Ederic Gouaisbaut Et Soheib FerganiElectro StudyPas encore d'évaluation
- j1 124 2 Asservissement CorrectionDocument10 pagesj1 124 2 Asservissement CorrectionmarnPas encore d'évaluation
- CI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument7 pagesCI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- 1-Contre RéactionDocument8 pages1-Contre RéactionWISSAL JANAPas encore d'évaluation
- Chapitre 5 - CorrigésDocument11 pagesChapitre 5 - CorrigésomarchrifPas encore d'évaluation
- 151 Exercice Pi Avance Phase PDFDocument3 pages151 Exercice Pi Avance Phase PDFZakaria BdrPas encore d'évaluation
- 151 Exercice Pi Avance PhaseDocument3 pages151 Exercice Pi Avance Phaseabdelmoghit fathelkhairPas encore d'évaluation
- 137 Correction Regulation de TemperatureDocument2 pages137 Correction Regulation de TemperatureOmar MenichiPas encore d'évaluation
- TD Aop BoumaazDocument15 pagesTD Aop BoumaazCharaf El kihalPas encore d'évaluation
- Les Filtres PassifsDocument12 pagesLes Filtres PassifsAymen KtataPas encore d'évaluation
- Slides M1 ICMp 8Document34 pagesSlides M1 ICMp 8DIC 1 G.EPas encore d'évaluation
- TD Régulation EMSI Série 2Document5 pagesTD Régulation EMSI Série 2SalabPas encore d'évaluation
- Chapitre 2 LAT51Document50 pagesChapitre 2 LAT51Aķ RamPas encore d'évaluation
- Mai 2015 CorrigéDocument7 pagesMai 2015 CorrigéAli brahim MahamatPas encore d'évaluation
- Chapitre 7 Reponse Harmonique SystemesDocument8 pagesChapitre 7 Reponse Harmonique SystemesmounaPas encore d'évaluation
- Chapitre V - Mise en Oeuvre Des Automatismes Sur APIDocument10 pagesChapitre V - Mise en Oeuvre Des Automatismes Sur APIdallagi mohamedPas encore d'évaluation
- Cours QuadripoleDocument7 pagesCours QuadripolemohamedPas encore d'évaluation
- Correction Pilote Automatique VoilierDocument3 pagesCorrection Pilote Automatique VoilierTHEMESSENGER kanePas encore d'évaluation
- PC 6Document16 pagesPC 6arijbaazaoui4Pas encore d'évaluation
- L1-PMI - AUTO 3 TD 7 Correcteurs SolutionDocument25 pagesL1-PMI - AUTO 3 TD 7 Correcteurs SolutionÀmîñė BôûdáPas encore d'évaluation
- ChapI - Rappels Stabilité Des SystèmesDocument28 pagesChapI - Rappels Stabilité Des SystèmesibrahimPas encore d'évaluation
- MPSI 23/24 P-I-5-E Filtres Lineaires: AutocontroleDocument11 pagesMPSI 23/24 P-I-5-E Filtres Lineaires: Autocontroleluc couraudPas encore d'évaluation
- Cor AOP3Document6 pagesCor AOP3Oussama KhouribachePas encore d'évaluation
- Contre Réaction - MasterSIE - Chap1Document35 pagesContre Réaction - MasterSIE - Chap1MAS FATALPas encore d'évaluation
- TP2 Loop-ShapeDocument4 pagesTP2 Loop-ShapeZiad ElPas encore d'évaluation
- Multisim: Pr. E.M. Skouri 1Document2 pagesMultisim: Pr. E.M. Skouri 1Mohamed ZnbPas encore d'évaluation
- Commande Stabilité Générale 20160930Document46 pagesCommande Stabilité Générale 20160930אֵלִיָּהו אֵלִיָּהוPas encore d'évaluation
- Controle Sur Les Aop Et Les FiltresDocument5 pagesControle Sur Les Aop Et Les Filtresleroy makita loubakiPas encore d'évaluation
- CI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document7 pagesCI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- 4-1 - Sequence - Echo de SpinDocument48 pages4-1 - Sequence - Echo de SpinfouedPas encore d'évaluation
- TD4 PDFDocument7 pagesTD4 PDFOumaima KamalPas encore d'évaluation
- Systemes Echantillonnés D'ordre 2Document2 pagesSystemes Echantillonnés D'ordre 2khayyamPas encore d'évaluation
- Etude Fréquentielle Des Systèmes de Premier Et SecondDocument31 pagesEtude Fréquentielle Des Systèmes de Premier Et SecondIheb KahouachPas encore d'évaluation
- Exam FIP Mars2010exam FIP Mars2010Document3 pagesExam FIP Mars2010exam FIP Mars2010Ali MEDJGHOUPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- td6 Precision Et CorrigéDocument5 pagestd6 Precision Et CorrigéHeni DaoudPas encore d'évaluation
- AmpliDocument40 pagesAmpliinssaf boudouasssalPas encore d'évaluation
- Oscillateurs Chap 3Document38 pagesOscillateurs Chap 3Hafsa HakimPas encore d'évaluation
- TD 6 (Ex & Sol)Document9 pagesTD 6 (Ex & Sol)aymen sayoudPas encore d'évaluation
- TD 6 (Ex Et Sol)Document9 pagesTD 6 (Ex Et Sol)anass sbniPas encore d'évaluation
- BodeDocument28 pagesBodeAmine SebaaiPas encore d'évaluation
- 3 - Marge de GainDocument2 pages3 - Marge de Gainkadirimar01Pas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- RSE & EthiqueDocument6 pagesRSE & Ethiquealemor2369Pas encore d'évaluation
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Analyse D'une Situation de Communication en TaDocument2 pagesAnalyse D'une Situation de Communication en Taroger martin bassong batiigPas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 pagesChapitre 1 LES OUTILS MATHEMATIQUESa.ddPas encore d'évaluation
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 pagesTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
- Depliant ELM MasterDocument3 pagesDepliant ELM MasterYazid AbouchihabeddinePas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 pagesPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimPas encore d'évaluation
- Marry Your Daughter Sheet - 1Document2 pagesMarry Your Daughter Sheet - 1Nurendung ZuliantoPas encore d'évaluation
- ExcisionDocument54 pagesExcisionAbdou Razak OuédraogoPas encore d'évaluation
- Tube VentouriDocument10 pagesTube VentouriMohammed BoulbairPas encore d'évaluation
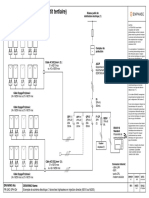
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- Exam. F.CDocument2 pagesExam. F.CmidsmasherPas encore d'évaluation
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- Memoire Inj Messaoud BENZOUAIDocument168 pagesMemoire Inj Messaoud BENZOUAIManong ShegueyPas encore d'évaluation
- Jadwal Genap 2223-2Document2 pagesJadwal Genap 2223-2nowo benyPas encore d'évaluation