Vous aimerez peut-être aussi
- Cours Ampli M1Document43 pagesCours Ampli M1Maria BshrPas encore d'évaluation
- Cours Ampli M1 PDFDocument43 pagesCours Ampli M1 PDFOumaima KamalPas encore d'évaluation
- Oscillateurs Chap 3Document38 pagesOscillateurs Chap 3Hafsa HakimPas encore d'évaluation
- Ds 2009-2010 No1 CorrectionDocument8 pagesDs 2009-2010 No1 CorrectiongamalPas encore d'évaluation
- TP HF Manipulation 3 ANALYSEUR DE RESEAUX VECTORIELSDocument8 pagesTP HF Manipulation 3 ANALYSEUR DE RESEAUX VECTORIELSMoo NY RAPas encore d'évaluation
- VidemeDocument8 pagesVidemeYussef HayouniPas encore d'évaluation
- Zaidi 2009-3Document20 pagesZaidi 2009-3Achref MethenniPas encore d'évaluation
- Cours Hyper FréquencesDocument113 pagesCours Hyper FréquencessperatePas encore d'évaluation
- Compte Rendu CompletDocument6 pagesCompte Rendu CompletSalah MedPas encore d'évaluation
- Compte Rendu CompletDocument6 pagesCompte Rendu Completassia guzel100% (1)
- Corriger Examen DispositifsRF 2022 STBDocument5 pagesCorriger Examen DispositifsRF 2022 STBAsbai RymaPas encore d'évaluation
- TP Capteur Acceleration & DeplacementDocument9 pagesTP Capteur Acceleration & Deplacementcopch2020Pas encore d'évaluation
- Mines PC Physique 2 2006 Corrigé ElectricitéDocument2 pagesMines PC Physique 2 2006 Corrigé Electricitéweissbergjo5Pas encore d'évaluation
- Partie5 Parametres S PDFDocument62 pagesPartie5 Parametres S PDFNisrine Bahri67% (3)
- Filtres Analogique ActifsDocument12 pagesFiltres Analogique ActifsmazrouiPas encore d'évaluation
- TP HF Manip 6 Amplificateur Micro OndesDocument10 pagesTP HF Manip 6 Amplificateur Micro OndesHassan DriouchPas encore d'évaluation
- Ea TP1Document15 pagesEa TP1S O R O O WPas encore d'évaluation
- Corrige Examen HyperfrequenceDocument5 pagesCorrige Examen HyperfrequenceRiad Siadi100% (2)
- TP N°2 AutomatiqueDocument10 pagesTP N°2 AutomatiqueIMEN BENALIPas encore d'évaluation
- Supports de TransmissionDocument19 pagesSupports de TransmissionBonté Divine REBOAS SEINFIOPas encore d'évaluation
- TELF Examen2018Document5 pagesTELF Examen2018hazem goutelPas encore d'évaluation
- TELF Examen2018Document5 pagesTELF Examen2018Děmøïšěllë RãnPas encore d'évaluation
- RechercheDocument9 pagesRechercheKooraNow HDPas encore d'évaluation
- Correction Oscillateur ColpittsDocument5 pagesCorrection Oscillateur Colpittsayman lamzouri100% (1)
- Cours 0Document115 pagesCours 0Tahar NbPas encore d'évaluation
- TP de CircuitDocument19 pagesTP de CircuitAMINE AIT YOUBPas encore d'évaluation
- Etude Pratique1Document5 pagesEtude Pratique1assia guzelPas encore d'évaluation
- Chap.11 Corrections Exercices EAN Heig-VdDocument97 pagesChap.11 Corrections Exercices EAN Heig-VdHerve Derouleaux100% (1)
- TD EeDocument5 pagesTD EeraniaPas encore d'évaluation
- TD - Electronique Embarquée VFDocument5 pagesTD - Electronique Embarquée VFFatima100% (1)
- (T) U (T) Avec U (T) 1 Pour T 0 Et 0 Ailleurs (T) e - X (T) Tu (T)Document19 pages(T) U (T) Avec U (T) 1 Pour T 0 Et 0 Ailleurs (T) e - X (T) Tu (T)Mouhamed mmoPas encore d'évaluation
- CommuniDocument25 pagesCommuniMai MinhPas encore d'évaluation
- Extrait-TD-Chap IV, Elect2 L1 S2 RTDocument3 pagesExtrait-TD-Chap IV, Elect2 L1 S2 RTZain GaradiPas encore d'évaluation
- Calcul - Condensateurs de Liaison Ou de DécouplageDocument6 pagesCalcul - Condensateurs de Liaison Ou de Découplagetounsimed100% (1)
- Régulation PID PDFDocument15 pagesRégulation PID PDFAmine AzaoumPas encore d'évaluation
- QuadripolesDocument11 pagesQuadripolesilyasse samiriPas encore d'évaluation
- EX2Document2 pagesEX2Salem SaidiPas encore d'évaluation
- Cours FiltresActifsDocument9 pagesCours FiltresActifsAyoub GhezlaouiPas encore d'évaluation
- Correction de L'épreuve1Document5 pagesCorrection de L'épreuve1Dimitry MabomPas encore d'évaluation
- TD Filtres CorrDocument10 pagesTD Filtres CorrBshAekPas encore d'évaluation
- Systemes Echantillonnés D'ordre 2Document2 pagesSystemes Echantillonnés D'ordre 2khayyamPas encore d'évaluation
- Électronique AnalogiqueDocument47 pagesÉlectronique AnalogiqueOmar Alaoui100% (3)
- Load FlowDocument2 pagesLoad FlowYazid AbouchihabeddinePas encore d'évaluation
- Révision Elec2 L1 RT S2Document12 pagesRévision Elec2 L1 RT S2Zain GaradiPas encore d'évaluation
- Ds 2007-2008 No3 CorrectionDocument6 pagesDs 2007-2008 No3 CorrectiondzmaigaPas encore d'évaluation
- Ampli Norton - PRTDocument26 pagesAmpli Norton - PRTMahfoud ZakiPas encore d'évaluation
- Filtre 1 Ordre1Document15 pagesFiltre 1 Ordre1Simo Ben OuaradPas encore d'évaluation
- 10-Ampli de Puissance PDFDocument31 pages10-Ampli de Puissance PDFnomane saidPas encore d'évaluation
- DC DC ConvertersDocument20 pagesDC DC ConverterssgalileePas encore d'évaluation
- Mmic Escpi Cnam 2Document10 pagesMmic Escpi Cnam 2bbaaziz2005Pas encore d'évaluation
- ForwardDocument9 pagesForwardmagnetik_66Pas encore d'évaluation
- Chap12 (Controle Auto Du Gain Appliqué Aux Oscillateurs Sinusoidaux)Document29 pagesChap12 (Controle Auto Du Gain Appliqué Aux Oscillateurs Sinusoidaux)sperate0% (1)
- PENDULE COUPLES (Ecoles)Document25 pagesPENDULE COUPLES (Ecoles)Sofiane Mehadji100% (2)
- Mesure de La Température Dans Un Puits GéothermiqueDocument6 pagesMesure de La Température Dans Un Puits Géothermiquegabin qatarPas encore d'évaluation
- Applications Des DiodesDocument24 pagesApplications Des DiodesEya JandoubiPas encore d'évaluation
- Filtrage Ordre NDocument11 pagesFiltrage Ordre NMolka BelkhodjaPas encore d'évaluation
- RC RL ParalleleDocument15 pagesRC RL ParalleleDavidos Payanfou KouchiakbistePas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Image Et VideoDocument10 pagesImage Et Videoseif amiriPas encore d'évaluation
- Structure D'un Plan D'étudeDocument145 pagesStructure D'un Plan D'étudeAdrien Jean Victor CoulonPas encore d'évaluation
- Cisco Express ForwardingDocument4 pagesCisco Express ForwardingAnovar_ebooks100% (1)
- Chapitre 1 Transistor JFET Ver1 11.05.23Document28 pagesChapitre 1 Transistor JFET Ver1 11.05.23AZIL AMINPas encore d'évaluation
- Chapitre 1-Téléphnie - 1Document15 pagesChapitre 1-Téléphnie - 1Takfarinas MezioudPas encore d'évaluation
- CHAP 1 Introduction RéseauxDocument63 pagesCHAP 1 Introduction RéseauxDidou DahmanePas encore d'évaluation
- Les Différents Types de RéseauxDocument2 pagesLes Différents Types de RéseauxtaoufiikPas encore d'évaluation
- ALARMEDocument10 pagesALARMESlah SmichiPas encore d'évaluation
- Chap 5 NGNDocument68 pagesChap 5 NGNmimibenPas encore d'évaluation
- Quetion de Cours CEM ResumeDocument2 pagesQuetion de Cours CEM ResumesjourjourPas encore d'évaluation
- TP-E Notions de Famille TechnologiqueDocument7 pagesTP-E Notions de Famille TechnologiqueMamadou FofanaPas encore d'évaluation
- Corrigé TD3Document7 pagesCorrigé TD3Brahim Leguebedj100% (2)
- LACP Et Routage Inter-VlanDocument8 pagesLACP Et Routage Inter-VlanheikelPas encore d'évaluation
- Supports de Transmission c8Document34 pagesSupports de Transmission c8ibouPas encore d'évaluation
- Modbus 2019Document45 pagesModbus 2019AZwaPas encore d'évaluation
- Securite Des Reseaux Axel Clyde BoukonoDocument30 pagesSecurite Des Reseaux Axel Clyde BoukonoAbou BmPas encore d'évaluation
- Depliant ElectroplanetDocument12 pagesDepliant Electroplanetalex driftPas encore d'évaluation
- Amplificateur OperationnelDocument15 pagesAmplificateur Operationnelmali100% (1)
- 143 5 Transmission Des Donnees Numeriques PDFDocument12 pages143 5 Transmission Des Donnees Numeriques PDFMiguel Clovis KamPas encore d'évaluation
- MplsDocument100 pagesMplsFadhilaCelinePas encore d'évaluation
- Rapport 1Document26 pagesRapport 1Othmàne ÀlaouiPas encore d'évaluation
- Amplificador Exile x3002Document24 pagesAmplificador Exile x3002Ricardo CervantesPas encore d'évaluation
- Labo3 13oct08Document8 pagesLabo3 13oct08franck enockPas encore d'évaluation
- How To Configure The Meet Me ConferenceDocument5 pagesHow To Configure The Meet Me ConferenceAnonymous k2SY4zdI3Pas encore d'évaluation
- TP3 STPDocument11 pagesTP3 STPmounia zaraPas encore d'évaluation
- Dzexams 1as Francais 370260Document4 pagesDzexams 1as Francais 370260si salem tassaditPas encore d'évaluation
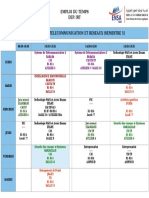
- Emploi GTR s5Document1 pageEmploi GTR s5Ahmed MoundirPas encore d'évaluation
- Cahier de La Formation PDFDocument138 pagesCahier de La Formation PDFAmine SaiPas encore d'évaluation
- Lettre D'afrique CentraleDocument19 pagesLettre D'afrique CentraleAli SidickPas encore d'évaluation
- COURS de 3ème Très BonDocument54 pagesCOURS de 3ème Très BonJoseph OndouaPas encore d'évaluation