Vous aimerez peut-être aussi
- Merchandising PDFDocument1 pageMerchandising PDFIlhame75% (8)
- Modele de Facture ProformaDocument1 pageModele de Facture ProformaHyacinthe KossiPas encore d'évaluation
- AutomateDocument32 pagesAutomateOussama LEG100% (1)
- Les Automates Vrais ProgrammablesDocument73 pagesLes Automates Vrais ProgrammablesAhmed MsfPas encore d'évaluation
- Automate ProgrammableDocument62 pagesAutomate ProgrammableFou FoufaPas encore d'évaluation
- Cours Automate Programmable Industriel - Les Automates Programmables Industriels API - HTMDocument12 pagesCours Automate Programmable Industriel - Les Automates Programmables Industriels API - HTMlosthell1067% (3)
- Document TP n1 Auto Ts2 2013-2014Document57 pagesDocument TP n1 Auto Ts2 2013-2014iyed gara100% (1)
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFAYOUBPas encore d'évaluation
- Siemens Step7 Manager Tutorial PDFDocument71 pagesSiemens Step7 Manager Tutorial PDFJawher SalemPas encore d'évaluation
- 3-Principe de Programmation AnalogiqueDocument13 pages3-Principe de Programmation AnalogiqueKhalil BelghiyatiPas encore d'évaluation
- Compte-Rendu Rli:: Université de Bordj Bou ArreridjDocument7 pagesCompte-Rendu Rli:: Université de Bordj Bou ArreridjAbdou RokyPas encore d'évaluation
- Cours Autom LPAIIDocument65 pagesCours Autom LPAIIElmokh LassaadPas encore d'évaluation
- tp2 Automatise Indutrielle PDFDocument12 pagestp2 Automatise Indutrielle PDFBouchra OUCHITEPas encore d'évaluation
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFfadacenglinPas encore d'évaluation
- Initiation 2 TIA Portal MS1Document24 pagesInitiation 2 TIA Portal MS1Anbari MehdiPas encore d'évaluation
- Le GrafcetDocument47 pagesLe GrafcetHamed AssanPas encore d'évaluation
- Reseau Industriel Profibus DPDocument78 pagesReseau Industriel Profibus DPLee Ezzitouni0% (1)
- Chapitre 1 - Generalité SCADADocument7 pagesChapitre 1 - Generalité SCADAMehdi Houari ZaidPas encore d'évaluation
- ControleDocument6 pagesControleمحفوظ سعيدPas encore d'évaluation
- MAI83 Chap4 1 IHM SCADADocument16 pagesMAI83 Chap4 1 IHM SCADAAmi NePas encore d'évaluation
- Systeme de LevageDocument5 pagesSysteme de LevageElmokh LassaadPas encore d'évaluation
- Cours ListDocument17 pagesCours ListWa ILPas encore d'évaluation
- Automates Programmables Industriels (APIDocument19 pagesAutomates Programmables Industriels (APIOtmane ZebraouiPas encore d'évaluation
- Projet Pilotagechariot Modbus FinalDocument21 pagesProjet Pilotagechariot Modbus FinalMaryame MOUTAOUKILPas encore d'évaluation
- Automates Programmables Industriels (API)Document28 pagesAutomates Programmables Industriels (API)Marouane OuchenePas encore d'évaluation
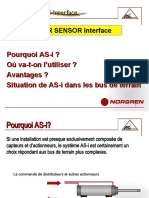
- As-I Systèmes de Bus de TerrainDocument34 pagesAs-I Systèmes de Bus de TerrainbilliPas encore d'évaluation
- Cours Step7Document49 pagesCours Step7Dawn Light0% (1)
- La Logique CableeDocument6 pagesLa Logique CableeborisPas encore d'évaluation
- FR B02 AnalogiqueDocument19 pagesFR B02 AnalogiqueKhaled OuniPas encore d'évaluation
- Cours Rli Partie 2Document159 pagesCours Rli Partie 2Abderrahim ErragragyPas encore d'évaluation
- Safarjalani 19Document72 pagesSafarjalani 19Khaoula FsihiPas encore d'évaluation
- ProjetDocument28 pagesProjetHIND TAROUT100% (1)
- Objectif Step7 Chapitre 4Document14 pagesObjectif Step7 Chapitre 4Jacques NjohPas encore d'évaluation
- Rapport Sur Les Automates ProgrammablesDocument21 pagesRapport Sur Les Automates ProgrammablesMohamed BenrahalPas encore d'évaluation
- TP 04 - 2 Robot Ericc 3 - SujetDocument6 pagesTP 04 - 2 Robot Ericc 3 - SujetzesfzsPas encore d'évaluation
- TP3 STEP7 TS1 EntreeanalogiqueDocument3 pagesTP3 STEP7 TS1 EntreeanalogiqueNajmeddine OthmaniPas encore d'évaluation
- Analogique Step7Document22 pagesAnalogique Step7EL ALJAPas encore d'évaluation
- Le Langage ABEL en Logique SequentielleDocument4 pagesLe Langage ABEL en Logique SequentielleNabil BikriPas encore d'évaluation
- SuperviDocument37 pagesSuperviFahssi AhmedPas encore d'évaluation
- TPDocument9 pagesTPAchref HermiPas encore d'évaluation
- Notice Simplifiée D'utilisation Du Logiciel PL7-PRODocument9 pagesNotice Simplifiée D'utilisation Du Logiciel PL7-PROhalackPas encore d'évaluation
- Mini Projet Supervision G5Document11 pagesMini Projet Supervision G5Med ElkotbiPas encore d'évaluation
- 1056-Schéma TI PDFDocument13 pages1056-Schéma TI PDFJàMàl MejorPas encore d'évaluation
- TP7 TSX37Document12 pagesTP7 TSX37math62210100% (2)
- Step 7 BlocsDocument29 pagesStep 7 Blocssamka0878Pas encore d'évaluation
- TP Automate ProgrammableDocument8 pagesTP Automate ProgrammableSamba SallPas encore d'évaluation
- Systéme de ContrôleDocument41 pagesSystéme de Contrôleالشريف يحياويPas encore d'évaluation
- 2FI 16-17 RatDocument3 pages2FI 16-17 RatEl GhafraouiPas encore d'évaluation
- TER LabviewDocument62 pagesTER LabviewRACHID100% (3)
- TP N°2 - Mise en Oueuvre D APIDocument4 pagesTP N°2 - Mise en Oueuvre D APIlange681Pas encore d'évaluation
- Exercices LADDERDocument4 pagesExercices LADDERfahd100% (1)
- Exercice GrafcetDocument23 pagesExercice GrafcetTS AUTOMATISATIONPas encore d'évaluation
- Tpssupindus - v1 - Avec Wincc 2ge-Aii Chaoui 2020-2021Document75 pagesTpssupindus - v1 - Avec Wincc 2ge-Aii Chaoui 2020-2021Fettah GuarnaouiPas encore d'évaluation
- 19 RegulationDocument11 pages19 RegulationAli Toumi SiefPas encore d'évaluation
- Navigation Autonome PDFDocument129 pagesNavigation Autonome PDFEli Fiacre ToulassiPas encore d'évaluation
- L3 - API - Chapitre 2 Langage À Contacts 2020Document17 pagesL3 - API - Chapitre 2 Langage À Contacts 2020ayanokojiPas encore d'évaluation
- Chapitre 3 - AutomatismeDocument9 pagesChapitre 3 - Automatismesaaadi aymenPas encore d'évaluation
- Automatisation Et SupervisionDocument2 pagesAutomatisation Et SupervisionFakhreddine OkailPas encore d'évaluation
- 5 - Diapo APIDocument31 pages5 - Diapo APItimo timoPas encore d'évaluation
- AutomatismesDocument74 pagesAutomatismesHamidin Wadi100% (2)
- Chapitre 3Document18 pagesChapitre 3Martinien YawoloPas encore d'évaluation
- Introduction Automatisme IndustrielDocument74 pagesIntroduction Automatisme IndustrielGuy Gildas Djem100% (1)
- SYL0020713Document4 pagesSYL0020713Hyacinthe KossiPas encore d'évaluation
- Memo Eco21Document16 pagesMemo Eco21Hyacinthe KossiPas encore d'évaluation
- Transformateur Étanche Type MODULOBLOCDocument20 pagesTransformateur Étanche Type MODULOBLOCHyacinthe KossiPas encore d'évaluation
- 162 CHAPITRE V Carnet Des Cy BlesDocument23 pages162 CHAPITRE V Carnet Des Cy BlesHyacinthe KossiPas encore d'évaluation
- Afe Eclairage CalculsDocument19 pagesAfe Eclairage CalculsHyacinthe Kossi100% (1)
- ACTIVITE3 CorDocument9 pagesACTIVITE3 CorHyacinthe KossiPas encore d'évaluation
- Schreder ComatelecDocument11 pagesSchreder ComatelecHyacinthe KossiPas encore d'évaluation
- Platines SHP 1491918639Document6 pagesPlatines SHP 1491918639Hyacinthe KossiPas encore d'évaluation
- Guideetu2019 20Document171 pagesGuideetu2019 20Hyacinthe KossiPas encore d'évaluation
- Coordination Riposte CovidDocument24 pagesCoordination Riposte CovidHyacinthe KossiPas encore d'évaluation
- Automatisme Industriel - Initiation À L'automate Programmable Industriel (Niveau de Base)Document53 pagesAutomatisme Industriel - Initiation À L'automate Programmable Industriel (Niveau de Base)Hyacinthe Kossi100% (1)
- Arduino Parametragehc06Document4 pagesArduino Parametragehc06Hyacinthe Kossi100% (1)
- Activite Initiation ArduinoDocument26 pagesActivite Initiation ArduinoHyacinthe KossiPas encore d'évaluation
- Manuel Cep 2017 FraDocument95 pagesManuel Cep 2017 FraHyacinthe KossiPas encore d'évaluation
- TD - S6 - Intro BioinfoDocument19 pagesTD - S6 - Intro BioinfoHyacinthe KossiPas encore d'évaluation
- SAPUTODocument18 pagesSAPUTOmastercssiPas encore d'évaluation
- SIG InitiationDocument55 pagesSIG InitiationmissaouiPas encore d'évaluation
- Scenariu Didactic l2 XDocument4 pagesScenariu Didactic l2 XRaluca MihalachePas encore d'évaluation
- 2021 Arrêté Par Préfet Le 25.10.2021Document114 pages2021 Arrêté Par Préfet Le 25.10.2021bugnotPas encore d'évaluation
- Document (1) OignonsDocument6 pagesDocument (1) OignonsLASSIOPas encore d'évaluation
- Import Depuis EBPDocument3 pagesImport Depuis EBPMijoro RabemanantsoaPas encore d'évaluation
- Correction de L'évaluationDocument2 pagesCorrection de L'évaluationLudivine MauchausséePas encore d'évaluation
- Ed6118 Mise en Oeuvre PrémurDocument35 pagesEd6118 Mise en Oeuvre PrémurAM NRPas encore d'évaluation
- Voici Les Avantages Les Et InconvenientsDocument2 pagesVoici Les Avantages Les Et Inconvenientshospitabledoctr53Pas encore d'évaluation
- Management de La Force de Vente Dans Une Entreprise Industrielle Cas: ENIEM Tizi-OuzouDocument87 pagesManagement de La Force de Vente Dans Une Entreprise Industrielle Cas: ENIEM Tizi-OuzouMaryem HamedPas encore d'évaluation
- Gabarit 20pour 20queues 20dDocument3 pagesGabarit 20pour 20queues 20dwlidhaaaPas encore d'évaluation
- Organigrama INSHSDocument1 pageOrganigrama INSHSlibermeusPas encore d'évaluation
- LE BUTEUR PDF Du 16/03/2011Document24 pagesLE BUTEUR PDF Du 16/03/2011PDF JournalPas encore d'évaluation
- Cahier - Des - Charges - APS Ouenghi VFDocument35 pagesCahier - Des - Charges - APS Ouenghi VFIssifouHamdaneAdamPas encore d'évaluation
- 1868 Em25112015 PDFDocument22 pages1868 Em25112015 PDFelmoudjahid_dzPas encore d'évaluation
- Catalogo General Apoyos FammsaDocument48 pagesCatalogo General Apoyos FammsarloayzamariacaPas encore d'évaluation
- (RS) Tableau D Bord Un Outil de Pilotage de La Performance - AL OMRANEDocument56 pages(RS) Tableau D Bord Un Outil de Pilotage de La Performance - AL OMRANEoumaima workPas encore d'évaluation
- Série SILENT-100 DESIGN 3CDocument5 pagesSérie SILENT-100 DESIGN 3CyassinePas encore d'évaluation
- UQAM Fiche dinformationDDDocument4 pagesUQAM Fiche dinformationDDandwinkelvinPas encore d'évaluation
- MGP7121 Exercice PERT PDFDocument16 pagesMGP7121 Exercice PERT PDFMarwa LahkimPas encore d'évaluation
- Compte Rendu de LaDocument10 pagesCompte Rendu de LaABDELALI SASSIOUI100% (1)
- Stage de 1ere Année LIVRABLE 1: Présentation de L'organisme D'accueilDocument12 pagesStage de 1ere Année LIVRABLE 1: Présentation de L'organisme D'accueilapi-673357128Pas encore d'évaluation
- D - 93 - 609 Modalites Statut Fonction Publique (1993)Document8 pagesD - 93 - 609 Modalites Statut Fonction Publique (1993)SegaAlainCoulibalyPas encore d'évaluation
- Analyse-15 Le Marche Des Engrais MinerauxDocument4 pagesAnalyse-15 Le Marche Des Engrais MinerauxEl ZinebPas encore d'évaluation
- Expose Du Groupe IiiDocument17 pagesExpose Du Groupe IiiabdoulayePas encore d'évaluation
- Anssi Guide Communication Crise CyberDocument56 pagesAnssi Guide Communication Crise CyberjohnPas encore d'évaluation
- Plaquette - ICH - Lyon GrenobleDocument22 pagesPlaquette - ICH - Lyon GrenobleMWPas encore d'évaluation
- 133554FRDocument47 pages133554FRyacineala90Pas encore d'évaluation
- TS410 420Document30 pagesTS410 420Cvita CvitićPas encore d'évaluation