Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
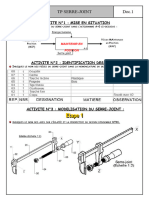
- TP Serre Joint PRDocument4 pagesTP Serre Joint PRmathfarm95Pas encore d'évaluation
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BDocument20 pagesCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniquePas encore d'évaluation
- 01 0 Serre Joint CorrectionDocument4 pages01 0 Serre Joint CorrectionTesteur MohammediaPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- TP Serre Joint PRDocument4 pagesTP Serre Joint PRmathfarm95Pas encore d'évaluation
- Cours Chaine Energie Prof 2Document5 pagesCours Chaine Energie Prof 2ismailmebarkiPas encore d'évaluation
- Etau de ModelisteDocument5 pagesEtau de Modelisteghgkjh67% (3)
- TD Serre Joint-SujetDocument4 pagesTD Serre Joint-SujetLOLOLOLOLOLOLOL LOLOLOLOLOLOLOLPas encore d'évaluation
- Klubprepa Extrait 4464Document1 pageKlubprepa Extrait 4464Mohamed El OuahdaniPas encore d'évaluation
- TP5 TreillisDocument7 pagesTP5 TreillisAyoubPas encore d'évaluation
- Tpslci-Nao R3 2013Document6 pagesTpslci-Nao R3 2013Med ElkafiPas encore d'évaluation
- TD Etau de ModelisteDocument6 pagesTD Etau de Modelisteattoumii75% (4)
- Capteur PneumatiqueDocument6 pagesCapteur Pneumatiquelfadli50% (2)
- Capteur PneumatiqueDocument6 pagesCapteur PneumatiqueAnonymous wRl5kD100% (1)
- TD Capteur PneumatiqueDocument4 pagesTD Capteur Pneumatiquebink-simracingPas encore d'évaluation
- Exercice: (6 PTS) : Contrôle TerminalDocument5 pagesExercice: (6 PTS) : Contrôle TerminalAMINE OUKESSOUPas encore d'évaluation
- cnc-tsi-physique1-2014eDocument8 pagescnc-tsi-physique1-2014eOussama ChoukerPas encore d'évaluation
- TD ETAU DE MODELISTE e PDFDocument5 pagesTD ETAU DE MODELISTE e PDFAlexis AlexisPas encore d'évaluation
- TD 2 MultivibrateurDocument2 pagesTD 2 MultivibrateurSamir Nait0% (1)
- Chapitre 01 - Poutres en Treilles Articules 2019Document11 pagesChapitre 01 - Poutres en Treilles Articules 2019rabehiPas encore d'évaluation
- TD - Serre Joint PDFDocument5 pagesTD - Serre Joint PDFIbra Moulay100% (2)
- E Ph1tsi2014Document7 pagesE Ph1tsi2014Llouis PhysicsPas encore d'évaluation
- TD Transistore BipolaireDocument5 pagesTD Transistore BipolaireOthmane EL BAROUDIPas encore d'évaluation
- TD2002-03 2 PDFDocument14 pagesTD2002-03 2 PDFbilllPas encore d'évaluation
- Asservissement de PositionDocument12 pagesAsservissement de PositionAbir SaalPas encore d'évaluation
- 6.TP2-Etude D'une Poutre Continue À 2 TravéesDocument4 pages6.TP2-Etude D'une Poutre Continue À 2 TravéesMokhtar LaroussiPas encore d'évaluation
- Correction de L - Etau Du ModelisteDocument4 pagesCorrection de L - Etau Du ModelisteHiba NacirPas encore d'évaluation
- Aucune Sortie Définitive N'est Autorisée Avant 12hDocument11 pagesAucune Sortie Définitive N'est Autorisée Avant 12hsenhaji allalPas encore d'évaluation
- Travaux Dirigés Robotique 1 2020Document4 pagesTravaux Dirigés Robotique 1 2020marwa hamdiPas encore d'évaluation
- Electronique, TD Et TP - IUT Annecy PDFDocument61 pagesElectronique, TD Et TP - IUT Annecy PDFA-h SayahPas encore d'évaluation
- Etau de Modeliste-3 PDFDocument6 pagesEtau de Modeliste-3 PDFMZX YTPas encore d'évaluation
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocument4 pagesDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitPas encore d'évaluation
- Ampli Op Résistance Négative PDFDocument1 pageAmpli Op Résistance Négative PDFMbaira LeilaPas encore d'évaluation
- TD Moteur-Courant-ContDocument2 pagesTD Moteur-Courant-Conthoussin unusPas encore d'évaluation
- Cours Electronique IIDocument93 pagesCours Electronique IIarduino signaux cardiaques100% (1)
- TDElec 4Document4 pagesTDElec 4aittaliPas encore d'évaluation
- Chap-1-Introduction À La RDMDocument11 pagesChap-1-Introduction À La RDMToxic DEV100% (1)
- ExercicesDocument14 pagesExercicesАднан Бен АзузPas encore d'évaluation
- 2 - 3 2nd OrdreDocument12 pages2 - 3 2nd OrdreIkrame LachgarPas encore d'évaluation
- CHAP1 - Etude Des Circuits Électriques en Régime ContinuDocument6 pagesCHAP1 - Etude Des Circuits Électriques en Régime ContinuIlyas IlyasPas encore d'évaluation
- Exercices AsservissementDocument14 pagesExercices AsservissementUineylaah Bayebec100% (1)
- Td9 - Solide Tunusie ImportantDocument28 pagesTd9 - Solide Tunusie ImportantDriss Miral Achemlal100% (1)
- TD 9Document28 pagesTD 9Ali AmaraPas encore d'évaluation
- Astuces Bobine - Dipôle RLDocument8 pagesAstuces Bobine - Dipôle RLdggdyouseefPas encore d'évaluation
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaPas encore d'évaluation
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza RimiPas encore d'évaluation
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxDocument5 pagesTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhPas encore d'évaluation
- 02 Transformee de LaplaceDocument8 pages02 Transformee de LaplaceAcoblazePas encore d'évaluation
- Ds Capt PneumDocument4 pagesDs Capt PneummohammedPas encore d'évaluation
- M35 (Cours 3)Document6 pagesM35 (Cours 3)Imad BenabdouallahPas encore d'évaluation
- Les Liaisons Doc Prof 11Document9 pagesLes Liaisons Doc Prof 11brhamza39Pas encore d'évaluation
- Ravaux Diriges: K K K KDocument14 pagesRavaux Diriges: K K K Kabderrahm harunPas encore d'évaluation
- Exercices Entrainement Maison PFSDocument27 pagesExercices Entrainement Maison PFSbouhlelimed20421Pas encore d'évaluation
- Physique - Lycee Bilingue de Yaounde - Annee Scolaire 2020 - 2021 - Mai 2021 - 2ndec CamerounDocument2 pagesPhysique - Lycee Bilingue de Yaounde - Annee Scolaire 2020 - 2021 - Mai 2021 - 2ndec CamerounManuel Loic FOKO TADJUIDJEPas encore d'évaluation
- TP14 Travail D'une Force EC2021Document4 pagesTP14 Travail D'une Force EC2021Maxime DecouvelaerePas encore d'évaluation
- TD AsservissementDocument17 pagesTD AsservissementSOUFIANE BOURCHIHPas encore d'évaluation
- Exercices - SEQ3 Physique 1ereDocument1 pageExercices - SEQ3 Physique 1ererivierePas encore d'évaluation
- EVALUATION SysML (BAES) Eleve v2Document6 pagesEVALUATION SysML (BAES) Eleve v2rivierePas encore d'évaluation
- Act LuméaDocument7 pagesAct LuméarivierePas encore d'évaluation
- TD Energies STI2D EleveDocument4 pagesTD Energies STI2D EleverivierePas encore d'évaluation
- Développement DurableDocument1 pageDéveloppement DurablerivierePas encore d'évaluation
- Redressement Non Commandé PD3Document3 pagesRedressement Non Commandé PD3Çha ÏmaPas encore d'évaluation
- Mise en Service D'un OuvrageDocument12 pagesMise en Service D'un OuvrageRégis ESCOBARPas encore d'évaluation
- TSFP03Document28 pagesTSFP03tp77870Pas encore d'évaluation
- Regime de Neutre TNDocument19 pagesRegime de Neutre TNAbdallah BukhariPas encore d'évaluation
- Kenmore Dishwasher 66517829000 Tech SheetDocument2 pagesKenmore Dishwasher 66517829000 Tech Sheetsallen8316Pas encore d'évaluation
- Chap 5 Accouplements PDFDocument13 pagesChap 5 Accouplements PDFJeremie Ivann NgoyePas encore d'évaluation
- Schémas de Liaison À La TerreDocument24 pagesSchémas de Liaison À La TerreGACHBARPas encore d'évaluation
- Catlogue France Blindage Topographique 2020 Compressed 2Document56 pagesCatlogue France Blindage Topographique 2020 Compressed 294bdca65d8550cPas encore d'évaluation
- Vue Eclatee Compresseur Vmu015100100 D Vmu015100200 D 22503rDocument2 pagesVue Eclatee Compresseur Vmu015100100 D Vmu015100200 D 22503rgaecdugrandvillagePas encore d'évaluation
- Guide Installation Vocalys CW32Document44 pagesGuide Installation Vocalys CW32Gil BertPas encore d'évaluation
- EREA Transformers - FR - Catalogue 2020-05Document107 pagesEREA Transformers - FR - Catalogue 2020-05souhaPas encore d'évaluation
- Interesting FileDocument18 pagesInteresting FileRafik MeksenPas encore d'évaluation
- Schneider - 2009 - Distribution Électrique BT Et HTA PDFDocument51 pagesSchneider - 2009 - Distribution Électrique BT Et HTA PDFCLAVOTPas encore d'évaluation
- Classement ArmesDocument4 pagesClassement ArmesboulangeotPas encore d'évaluation
- Alex PlomberieDocument1 pageAlex PlomberieYossou TayePas encore d'évaluation
- Voigtlander Vito B-FrenchDocument33 pagesVoigtlander Vito B-FrenchCristina LonardoniPas encore d'évaluation
- Spare Parts Prices List February 2014Document288 pagesSpare Parts Prices List February 2014Wilfer PimientoPas encore d'évaluation
- Compte Rendu TP ElectrocinétiqueDocument6 pagesCompte Rendu TP ElectrocinétiqueSafia Garrouj100% (1)
- Architecture API - Partie 2Document9 pagesArchitecture API - Partie 2AbdoPas encore d'évaluation
- Exercice Corrigés D'engrenages - Construction MécaniqueDocument7 pagesExercice Corrigés D'engrenages - Construction MécaniqueEmmanuel TchouyaPas encore d'évaluation
- Glossaire 20100317Document5 pagesGlossaire 20100317HossinMazouziPas encore d'évaluation
- Catalogue ProduitDocument65 pagesCatalogue ProduitbelharechePas encore d'évaluation
- PLP 2011 Electrotech 1 CorrigeDocument45 pagesPLP 2011 Electrotech 1 CorrigeslomczynskiPas encore d'évaluation
- Manuel D'utilisationDocument79 pagesManuel D'utilisationBelindaPas encore d'évaluation
- Fusibles Golf 4Document8 pagesFusibles Golf 4kadi espoirePas encore d'évaluation
- 3Document14 pages3DENOUPas encore d'évaluation
- DC-L2EI s1 API Nov-2022 CorrDocument2 pagesDC-L2EI s1 API Nov-2022 Corrrayenkr03Pas encore d'évaluation
- Introduction:: Demarrage Direct D'Un Moteur AsynchroneDocument7 pagesIntroduction:: Demarrage Direct D'Un Moteur Asynchronebennoui houssemPas encore d'évaluation
- Notice Technique - Masterdose LS 24V - FRDocument12 pagesNotice Technique - Masterdose LS 24V - FRluc lopezPas encore d'évaluation
- Quel Smartphone AcheterDocument18 pagesQuel Smartphone Achetervic “vicmillemine” milleminePas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesD'EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesPas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Voyage au-delà du corps: L'exploration de nos Univers intérieursD'EverandVoyage au-delà du corps: L'exploration de nos Univers intérieursÉvaluation : 4.5 sur 5 étoiles4.5/5 (20)