Vous aimerez peut-être aussi
- Devoir de Contrôle N°2 - Génie Mécanique Système de Préparation D'un Produit Buvable - Bac Technique (2012-2013) MR Ben Abdallah Marouan PDFDocument11 pagesDevoir de Contrôle N°2 - Génie Mécanique Système de Préparation D'un Produit Buvable - Bac Technique (2012-2013) MR Ben Abdallah Marouan PDFabdelbasset11100% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocinePas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Manuel Du CoursDocument122 pagesManuel Du CoursResultats RecherchePas encore d'évaluation
- Dossier Technique 95spDocument7 pagesDossier Technique 95spouhssainanouarPas encore d'évaluation
- Small SmAT89S4051 (SCH)Document1 pageSmall SmAT89S4051 (SCH)Mónica Barrera CPas encore d'évaluation
- Oscillateurs TPDocument8 pagesOscillateurs TPMohamed BelaounPas encore d'évaluation
- Simulation Exercice 2 ComparateurDocument4 pagesSimulation Exercice 2 ComparateurAmine CheurfaPas encore d'évaluation
- Potentiostat PDFDocument9 pagesPotentiostat PDFsafiaPas encore d'évaluation
- 8 TP AOp PWM Ismin 1ADocument7 pages8 TP AOp PWM Ismin 1AFarid BakaPas encore d'évaluation
- Esquema de VariadorDocument16 pagesEsquema de VariadorsurycatePas encore d'évaluation
- Cours de Conception Et Fabrications Assistées Par OrdiDocument141 pagesCours de Conception Et Fabrications Assistées Par Ordimariereinetherese2Pas encore d'évaluation
- TP1 Oscillateurs IsisDocument3 pagesTP1 Oscillateurs IsisAnas FarhaouiPas encore d'évaluation
- But Du TP 1: Apprendre À Faire Des Set-Up de Simulation: 1-Analyse DCDocument3 pagesBut Du TP 1: Apprendre À Faire Des Set-Up de Simulation: 1-Analyse DCSalma GhzalPas encore d'évaluation
- Chap 2 ADocument32 pagesChap 2 ACésaire Aimé NdjemPas encore d'évaluation
- 1.555 SirenDocument1 page1.555 SirenSanket HulagePas encore d'évaluation
- Serie 1 AOP Extrait BacDocument7 pagesSerie 1 AOP Extrait BacKadri Mongi100% (1)
- TP 15 ClassebDocument3 pagesTP 15 ClassebPatrick BushabuPas encore d'évaluation
- Photo - Schema Grip Canon Compatibles PDFDocument16 pagesPhoto - Schema Grip Canon Compatibles PDFjp79dsfrPas encore d'évaluation
- TP 5Document2 pagesTP 5Khaled AmriPas encore d'évaluation
- DT dc2 2015Document1 pageDT dc2 2015Rami AliPas encore d'évaluation
- Ex 90 SiDocument8 pagesEx 90 SiDavid NicolasPas encore d'évaluation
- Tp3 Simulation Comportement en Fréquence Et DistorsionsDocument3 pagesTp3 Simulation Comportement en Fréquence Et DistorsionsALEXIS PCPas encore d'évaluation
- Basculeur Auto Pour AccusDocument5 pagesBasculeur Auto Pour Accuspoilodo2002Pas encore d'évaluation
- TP5 AnalogiqueDocument6 pagesTP5 AnalogiqueIbra YAACOUBIPas encore d'évaluation
- Rattrapage Electronic Devoir Maison 2020Document2 pagesRattrapage Electronic Devoir Maison 2020ryuk0tsuseiPas encore d'évaluation
- HacheursDocument6 pagesHacheursdjellidelnPas encore d'évaluation
- API Similaire À SIMATICDocument5 pagesAPI Similaire À SIMATICelevePas encore d'évaluation
- Corrige TD 3Document18 pagesCorrige TD 3fayearmelPas encore d'évaluation
- Chargeur de Smartphone - Fiche Élèves Vierge - CopieDocument7 pagesChargeur de Smartphone - Fiche Élèves Vierge - CopieqzddqzdPas encore d'évaluation
- TD Can CnaDocument2 pagesTD Can CnaRigelPas encore d'évaluation
- EXO1Document6 pagesEXO1l mPas encore d'évaluation
- Electronique Et Loisirs Magazine N 38 2002 07Document12 pagesElectronique Et Loisirs Magazine N 38 2002 07HamdiPas encore d'évaluation
- TP 7 Realisation Detection D'enveloppeDocument3 pagesTP 7 Realisation Detection D'enveloppeYves AbrahamPas encore d'évaluation
- 1 - TD1 - Decoupe de ProfilesDocument3 pages1 - TD1 - Decoupe de ProfilesLeroy Lionel SonfackPas encore d'évaluation
- TP - Modulation1 2Document2 pagesTP - Modulation1 2mêđ ŁïmãmêPas encore d'évaluation
- 01-TD Cablage AutomateDocument8 pages01-TD Cablage AutomateAyoub Hannad100% (1)
- Transfo MonophaséDocument14 pagesTransfo Monophaséarmel-afanou-793888% (8)
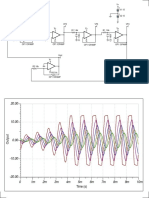
- Oscillator BubbaDocument1 pageOscillator BubbaaroutrayPas encore d'évaluation
- Avr Jtag DebuggerDocument1 pageAvr Jtag DebuggerthietdaucongPas encore d'évaluation
- Cours Electronique 2008 GrenobleDocument27 pagesCours Electronique 2008 GrenobleHasan RajawiPas encore d'évaluation
- Devoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedDocument10 pagesDevoir de Synthèse N°2 - Ligne Automatisee de Production de Pains - Bac Technique (2019-2020) MR Ben Aouicha MohamedKhalil BkekriPas encore d'évaluation
- Unité de Remplissage Des Bouteilles en Huile D'olive: Drep XXDocument20 pagesUnité de Remplissage Des Bouteilles en Huile D'olive: Drep XXAhmed ChebchoubPas encore d'évaluation
- D LectroniqueDocument4 pagesD LectroniqueAhmed ElhamraouiPas encore d'évaluation
- Talkie walkie presentationDocument16 pagesTalkie walkie presentationBoni GBEDOUROROUPas encore d'évaluation
- Esquema de Conexion 5 Salidas DigitalesDocument1 pageEsquema de Conexion 5 Salidas DigitalesDiego Ortega TorresPas encore d'évaluation
- f03b013 PDFDocument5 pagesf03b013 PDFStahl DarthPas encore d'évaluation
- Bloc A TQC PDFDocument238 pagesBloc A TQC PDFAbdelPas encore d'évaluation
- Comparateur A Fenetre Exercice1Document2 pagesComparateur A Fenetre Exercice1ngabananamadjipPas encore d'évaluation
- CompresseurDocument1 pageCompresseurJorge Eduardo Iriart BidartPas encore d'évaluation
- UntitledDocument18 pagesUntitledMajid ROCHDIPas encore d'évaluation
- TP ELN S2 6 Oscillateur Pont de WienDocument8 pagesTP ELN S2 6 Oscillateur Pont de WienSelma SenioritaPas encore d'évaluation
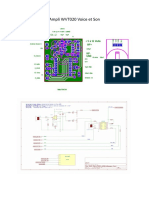
- Ampli WVT020 Voice Et SonDocument1 pageAmpli WVT020 Voice Et SonTy tyuPas encore d'évaluation
- Convertiseur Ana - NumeDocument6 pagesConvertiseur Ana - NumebouziPas encore d'évaluation
- TP2 PLL IsisDocument2 pagesTP2 PLL IsisRaghad100% (1)
- 7 C1 Ali 4ST 22Document12 pages7 C1 Ali 4ST 22Kadri MongiPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Distillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Document7 pagesDistillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Amira JebaliPas encore d'évaluation
- TP4 ArduinoDocument3 pagesTP4 ArduinoAmira JebaliPas encore d'évaluation
- TP Arduino N0Document11 pagesTP Arduino N0Amira Jebali100% (1)
- TP 2: Boutons Poussoirs & Afficheur 7 Segments Sous ArduinoDocument6 pagesTP 2: Boutons Poussoirs & Afficheur 7 Segments Sous ArduinoAmira Jebali0% (1)
- TP 3Document6 pagesTP 3Amira JebaliPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIDocument4 pagesDevoir de Contrôle N°2 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFIAmira JebaliPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Électrique Traitement Thermodynamique - Bac Technique (2010-2011) MR ABDALLAH RAOUAFIDocument4 pagesDevoir de Contrôle N°2 - Génie Électrique Traitement Thermodynamique - Bac Technique (2010-2011) MR ABDALLAH RAOUAFIAmira JebaliPas encore d'évaluation
- Physique CDocument5 pagesPhysique CDado khadidja SoumaréPas encore d'évaluation
- Physique TroisièmeDocument53 pagesPhysique TroisièmeRichard GotorayePas encore d'évaluation
- Canvas de Rédaction Du TP 1Document10 pagesCanvas de Rédaction Du TP 1idirmustapha217Pas encore d'évaluation
- TH2012PEST1157 CompleteDocument204 pagesTH2012PEST1157 CompleteNassim Ben AbdeddayemPas encore d'évaluation
- Généralités Dur La Cellule Solaire PhotovoltaiqueDocument62 pagesGénéralités Dur La Cellule Solaire Photovoltaiquesonia bettaharPas encore d'évaluation
- Evapotranspiration PDFDocument113 pagesEvapotranspiration PDFstrength dealPas encore d'évaluation
- Natationfacteursperformanceevaluation 140815013909 Phpapp02Document32 pagesNatationfacteursperformanceevaluation 140815013909 Phpapp02Dolores De MeulemeesterPas encore d'évaluation
- E TD3 RecupPVDocument2 pagesE TD3 RecupPVOthman DakirPas encore d'évaluation
- Exercices Corriges PCDocument84 pagesExercices Corriges PCOuedraogo Harouna92% (12)
- Rapport Stage DDocument25 pagesRapport Stage DYusufPas encore d'évaluation
- Étude Thermo-Aéraulique D'une Piscine IntérieureDocument120 pagesÉtude Thermo-Aéraulique D'une Piscine IntérieureNounou MadPas encore d'évaluation
- CinetiqueDocument25 pagesCinetiqueOussama El BouadiPas encore d'évaluation
- Résumé - Transistor Bipolaire en Régime StatiqueDocument5 pagesRésumé - Transistor Bipolaire en Régime StatiqueMohamed Lachhab100% (1)
- 03 Notions de RhéologieDocument12 pages03 Notions de RhéologieJorge VieiraPas encore d'évaluation
- Chapitre II Prepa 1Document10 pagesChapitre II Prepa 1diarraPas encore d'évaluation
- Rapport TP Mecanique Moteur NGANGOYE & MOUKOKODocument20 pagesRapport TP Mecanique Moteur NGANGOYE & MOUKOKOVityka NgangoyePas encore d'évaluation
- Série p1 1s2Document2 pagesSérie p1 1s2ANTOINE THIAREPas encore d'évaluation
- Science Physique SBT SetDocument154 pagesScience Physique SBT Setmariame1999100% (4)
- Rapport Compensation Énergie Réactive Avec Les Onduleurs PVDocument46 pagesRapport Compensation Énergie Réactive Avec Les Onduleurs PVTarek HaddarPas encore d'évaluation
- Exercices Corriges Thermo PDFDocument34 pagesExercices Corriges Thermo PDFLoubna MentarPas encore d'évaluation
- These PDFDocument274 pagesThese PDFMohamed BenhalimaPas encore d'évaluation
- Compte Rendu Cinetique Ch4 Ismail Et InesDocument5 pagesCompte Rendu Cinetique Ch4 Ismail Et InesIsmail ZitouniPas encore d'évaluation
- Radioprotection Notes Cours JAN2022Document80 pagesRadioprotection Notes Cours JAN2022Kaoutar siemens FontogePas encore d'évaluation
- GT 2 - SujetDocument16 pagesGT 2 - SujetEva ToledPas encore d'évaluation
- PS-10-2 FR AqDocument8 pagesPS-10-2 FR AqAlexandreCaironiPas encore d'évaluation
- Activite Archimede VFDocument5 pagesActivite Archimede VFFeki MahdiPas encore d'évaluation
- 2005 Liban Sujet Exo2 OscillElec 5ptsDocument4 pages2005 Liban Sujet Exo2 OscillElec 5ptsaa.aa1Pas encore d'évaluation
- Brevet Amérique Nord 2018 - Ions PH Masse Vol TempDocument4 pagesBrevet Amérique Nord 2018 - Ions PH Masse Vol TempTsstPas encore d'évaluation
- Bioclimatologie USTHB PDFDocument57 pagesBioclimatologie USTHB PDFKhaled NaasPas encore d'évaluation
- ARGILEDocument11 pagesARGILEsaidPas encore d'évaluation