Vous aimerez peut-être aussi
- tp12 2sc Équilibre D'un Solide Soumis A Trois ForcesDocument2 pagestp12 2sc Équilibre D'un Solide Soumis A Trois Forcessaanoun100% (3)
- TP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixeDocument3 pagesTP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixesaanounPas encore d'évaluation
- Devoir de Contrôle N°2 Lycée Pilote - Physique - 2ème Sciences (2012-2013) MR Galaî Abdelhamid PDFDocument3 pagesDevoir de Contrôle N°2 Lycée Pilote - Physique - 2ème Sciences (2012-2013) MR Galaî Abdelhamid PDFAhmed Yassine Hdhiri100% (1)
- MomentDocument7 pagesMomentAhmed BoussoffaraPas encore d'évaluation
- Controle 1-2eme Semestre - 2 Annee Inter Mod3 (WWW - Pc1.ma)Document3 pagesControle 1-2eme Semestre - 2 Annee Inter Mod3 (WWW - Pc1.ma)Youssef KarroumPas encore d'évaluation
- Devoir de TP N°1 - Physique - 2ème Sciences (2016-2017) MR Frioui EzzeddineDocument4 pagesDevoir de TP N°1 - Physique - 2ème Sciences (2016-2017) MR Frioui Ezzeddinei BerylPas encore d'évaluation
- Cours 1 - 1bac Mouvement de Rotation D'un Corps Solide Autour D'un Axe FixeDocument5 pagesCours 1 - 1bac Mouvement de Rotation D'un Corps Solide Autour D'un Axe Fixefay mourPas encore d'évaluation
- Champmagnetique 6cDocument3 pagesChampmagnetique 6cHanine HmidaPas encore d'évaluation
- Equilibre D'un Solide Susceptible de Tourner Autour D'un Axe FixeDocument2 pagesEquilibre D'un Solide Susceptible de Tourner Autour D'un Axe FixeOmar ait taleb ali100% (1)
- Équilibre D'un Solide Soumis À Trois ForcesDocument1 pageÉquilibre D'un Solide Soumis À Trois ForcesMouhamed Ali SahbaniPas encore d'évaluation
- Travail Et Energie Interne Sc-Math - Semi-RemplieDocument5 pagesTravail Et Energie Interne Sc-Math - Semi-RemplieMidox Mehdi100% (1)
- Controle 3Document6 pagesControle 3karimsalihPas encore d'évaluation
- ElectrolyteDocument4 pagesElectrolytemhaouekPas encore d'évaluation
- Exercice Courant Électrique 2Document1 pageExercice Courant Électrique 2lolarab50% (2)
- Examen TP 2ème Année Sciences4Document3 pagesExamen TP 2ème Année Sciences4samir halfaouiPas encore d'évaluation
- Oscilloscope Tension Alternative CorrigeDocument2 pagesOscilloscope Tension Alternative CorrigeT MaursPas encore d'évaluation
- Série Interaction MagnétiqueDocument5 pagesSérie Interaction Magnétiqueamine touatiPas encore d'évaluation
- Devoir de Contrôle N°1 Avec Correction - Sciences Physiques - 1ère AS (2016-2017) MR BARHOUMI Ezedine 1Document4 pagesDevoir de Contrôle N°1 Avec Correction - Sciences Physiques - 1ère AS (2016-2017) MR BARHOUMI Ezedine 1Radwane LourhmatiPas encore d'évaluation
- Série D'exercices - Math - Activités Numériques (1) - 1ère AsDocument2 pagesSérie D'exercices - Math - Activités Numériques (1) - 1ère Asamal matmati100% (1)
- Série N° 19 Moment D Une Force Théorème Des Moments 2Document4 pagesSérie N° 19 Moment D Une Force Théorème Des Moments 2Khouloud MaddouriPas encore d'évaluation
- (WWW - Devoir.tn) Série N°11 Solide en Équilibre Soumis À 3 Forces Précipitation Des Électrolytes 2010 2011 (Adem Bouali)Document2 pages(WWW - Devoir.tn) Série N°11 Solide en Équilibre Soumis À 3 Forces Précipitation Des Électrolytes 2010 2011 (Adem Bouali)sdoulajPas encore d'évaluation
- TD N°4 Espace Champ ÉlectrostatiqueDocument1 pageTD N°4 Espace Champ ÉlectrostatiqueFélix KouassiPas encore d'évaluation
- Caracteristiques D Un Dipole Actif Cours 2Document11 pagesCaracteristiques D Un Dipole Actif Cours 2abdelouahab fartalPas encore d'évaluation
- Le Courant Alternatif, Exo1Document1 pageLe Courant Alternatif, Exo1Fahmawi HakimPas encore d'évaluation
- 1689741 (1)Document2 pages1689741 (1)jurassiquepark100% (1)
- DCN2-1ere 2021fDocument3 pagesDCN2-1ere 2021fBoussetta ZouhaierPas encore d'évaluation
- DCN2 1ereDocument3 pagesDCN2 1ereBoussetta ZouhaierPas encore d'évaluation
- TP 2 - Tension AlternativeDocument4 pagesTP 2 - Tension Alternativepofphysique100% (2)
- 1 UnlockedDocument6 pages1 UnlockedAbdelhak SadikPas encore d'évaluation
- DS2 2eme InfoDocument3 pagesDS2 2eme InfoRiadh MarouaniPas encore d'évaluation
- Etude Quantitative D'une Réaction Chimique I) Conservation de La MasseDocument2 pagesEtude Quantitative D'une Réaction Chimique I) Conservation de La MasseMouhibi AbdellahPas encore d'évaluation
- Devoir 1 S 1Document2 pagesDevoir 1 S 1dam 12Pas encore d'évaluation
- Série 28 Travail D'une Force Puissance PDFDocument3 pagesSérie 28 Travail D'une Force Puissance PDFchiheb100% (1)
- Cours PC TC International 6 3Document7 pagesCours PC TC International 6 3kamalPas encore d'évaluation
- Devoir de Synthèse N°1 - Physique-Chimie - 2ème Sciences (2010-2011) MR Abdelouaheb AâmelDocument3 pagesDevoir de Synthèse N°1 - Physique-Chimie - 2ème Sciences (2010-2011) MR Abdelouaheb AâmelBk AyoutessPas encore d'évaluation
- 20katas Pour Avoir Les ConcoursDocument10 pages20katas Pour Avoir Les ConcoursAristide De Mantsala IfiakePas encore d'évaluation
- TRAVAUX DIRIGES Physique Première D SUR LE FLUX MAGNETIQUE PDFDocument2 pagesTRAVAUX DIRIGES Physique Première D SUR LE FLUX MAGNETIQUE PDFFrederic Mbouc100% (1)
- Devoir de Controle N 2 Physique 2eme TI 2008 2009 MR Hamza Hamrouni PDFDocument2 pagesDevoir de Controle N 2 Physique 2eme TI 2008 2009 MR Hamza Hamrouni PDFMhaouek SoniaPas encore d'évaluation
- Exercice 1Document4 pagesExercice 1DRGMAX MAXPas encore d'évaluation
- BonusDocument1 pageBonusAchemlal MarwaPas encore d'évaluation
- Devoir 1 Modele 4 Physique Chimie TC Semestre 1 1Document2 pagesDevoir 1 Modele 4 Physique Chimie TC Semestre 1 1Rayane ghPas encore d'évaluation
- Dipole Actif Dipole PassifDocument2 pagesDipole Actif Dipole PassifYoussef Dahani100% (1)
- Série 4 Chimie Les SolutionsDocument2 pagesSérie 4 Chimie Les SolutionsSamou_haaPas encore d'évaluation
- TP Loi D'ohmDocument3 pagesTP Loi D'ohmAyoub Ben Mlah100% (2)
- Le Champ Magnetique Exercices Non Corriges 1Document9 pagesLe Champ Magnetique Exercices Non Corriges 1Moustapha CheikhPas encore d'évaluation
- Equilibre D Un Solide Soumis A Deux Forces Corrige Serie D Exercices 2Document5 pagesEquilibre D Un Solide Soumis A Deux Forces Corrige Serie D Exercices 2abou imranPas encore d'évaluation
- Capture D'écran . 2023-04-05 À 7.12.20 PMDocument8 pagesCapture D'écran . 2023-04-05 À 7.12.20 PMcheikhna lemrabettPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences Physiques PH D'une Solution, Le Transistor - 2ème Informatique (2010-2011) MR Ben Abdeljelil SamiDocument3 pagesDevoir de Contrôle N°2 - Sciences Physiques PH D'une Solution, Le Transistor - 2ème Informatique (2010-2011) MR Ben Abdeljelil SamiTnt 1111Pas encore d'évaluation
- Série Exercice Dipole ActifDocument3 pagesSérie Exercice Dipole ActifSmove Oner100% (2)
- Le Champ Magnetique Cree Par Un Courant Electrique Cours 3 2Document4 pagesLe Champ Magnetique Cree Par Un Courant Electrique Cours 3 2abdelhamidPas encore d'évaluation
- 5 Équilibre D'un Solide Soumis À Deux Forces Prof - Bourassi (WWW - Pc1.ma)Document2 pages5 Équilibre D'un Solide Soumis À Deux Forces Prof - Bourassi (WWW - Pc1.ma)Prince AbdooPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2016-2017) MR Amari AbdelkrimDocument3 pagesDevoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2016-2017) MR Amari AbdelkrimZouari IsmailPas encore d'évaluation
- Lycee Rue Taieb Elmhiri Menzel Temime Cours-7: Forces Et Equilibre Sciences Physiques: Classes: 2 Sciences BaccariDocument6 pagesLycee Rue Taieb Elmhiri Menzel Temime Cours-7: Forces Et Equilibre Sciences Physiques: Classes: 2 Sciences BaccariHanine HmidaPas encore d'évaluation
- Evaluation Des AcquisDocument2 pagesEvaluation Des AcquisGOUNOUPas encore d'évaluation
- TD AboumalikDocument2 pagesTD AboumalikKaab ObayPas encore d'évaluation
- TP 14 1s4 Tension Du Ressort Loi de HookeDocument2 pagesTP 14 1s4 Tension Du Ressort Loi de HookesaanounPas encore d'évaluation
- Equilibre D'un Corps Solide Pouvant Tourner Autour D'un Axe Fixe-Activité-FRDocument4 pagesEquilibre D'un Corps Solide Pouvant Tourner Autour D'un Axe Fixe-Activité-FRSaid FesPas encore d'évaluation
- Cour La Droite Dans Le PlanDocument5 pagesCour La Droite Dans Le PlanouchenPas encore d'évaluation
- TP 14 1s4 Tension Du Ressort Loi de HookeDocument2 pagesTP 14 1s4 Tension Du Ressort Loi de HookesaanounPas encore d'évaluation
- TP 16 1s4 Forces Et PressionDocument2 pagesTP 16 1s4 Forces Et PressionsaanounPas encore d'évaluation
- TP 10 2sc La Tension VariableDocument5 pagesTP 10 2sc La Tension VariablesaanounPas encore d'évaluation
- TP 11 2e SC Redressement Du Courant AlternatifDocument4 pagesTP 11 2e SC Redressement Du Courant AlternatifsaanounPas encore d'évaluation
- TP 15 2sc Tests D'identification de Quelques IonsDocument4 pagesTP 15 2sc Tests D'identification de Quelques IonssaanounPas encore d'évaluation
- Dossier Corrigé MecaDocument8 pagesDossier Corrigé Mecaantoine71160Pas encore d'évaluation
- Couples de Serrage - Couples de Controle (Gedore) PDFDocument12 pagesCouples de Serrage - Couples de Controle (Gedore) PDFAmi RoslanePas encore d'évaluation
- Chapitre1-Vecteurs Torseurs PDFDocument19 pagesChapitre1-Vecteurs Torseurs PDFIlies GourriPas encore d'évaluation
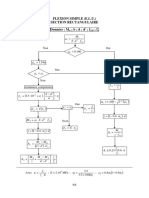
- Organigrame BaelDocument5 pagesOrganigrame BaelKaram HoussamPas encore d'évaluation
- Control Non DestructifDocument7 pagesControl Non Destructifhouyam hamdiPas encore d'évaluation
- Etude Des Pendules Couplés Par Une Barre de Torsion: I-But Du TravailDocument5 pagesEtude Des Pendules Couplés Par Une Barre de Torsion: I-But Du TravailSamado Tips46Pas encore d'évaluation
- Chap M2Document33 pagesChap M2Kader MilanoPas encore d'évaluation
- Chap I I Biomedical eDocument26 pagesChap I I Biomedical eZOUHAIR KADDIOUIPas encore d'évaluation
- Cours S4 Edp 08Document81 pagesCours S4 Edp 08Guy Gildas DjemPas encore d'évaluation
- Dans Les Secrets de L UniversDocument165 pagesDans Les Secrets de L UniversNihad FarahPas encore d'évaluation
- Edgar Morin Introduction A La Pense e Complexe PDF Images Avec Recherche PDFDocument157 pagesEdgar Morin Introduction A La Pense e Complexe PDF Images Avec Recherche PDFLeonardo David Hdez83% (6)
- Les Defauts TriphasesDocument12 pagesLes Defauts TriphasesBillel Soti100% (1)
- Correction Examen PC Juin 2016 2bac SVT FRDocument7 pagesCorrection Examen PC Juin 2016 2bac SVT FRhassan ibnahmadPas encore d'évaluation
- S2 1011 Mecanique Des Fluides TD CorrectionDocument9 pagesS2 1011 Mecanique Des Fluides TD Correctiontarif ashtarPas encore d'évaluation
- Modélisation en 2 Dimensions D'une Poutre de Forme Rectangulaire Trouée, Homogène Et Isotrope en Élastoplasticité Sous Sollicitation StatiqueDocument8 pagesModélisation en 2 Dimensions D'une Poutre de Forme Rectangulaire Trouée, Homogène Et Isotrope en Élastoplasticité Sous Sollicitation StatiqueYOUNES KABBAJPas encore d'évaluation
- Gilbert Simondon L'Individuation Psychique Et CoDocument138 pagesGilbert Simondon L'Individuation Psychique Et CoMariana Kaufman100% (1)
- Les Transformations PhysiquesDocument6 pagesLes Transformations Physiquesbcmdata bcmdata100% (1)
- Exercice 1Document6 pagesExercice 1Houssam FerrahPas encore d'évaluation
- RPFE (Récupération de L'énergie Biomécanique) 2023Document38 pagesRPFE (Récupération de L'énergie Biomécanique) 2023Loffy AyouPas encore d'évaluation
- C4 2Document22 pagesC4 2Hoang-Vu BuiPas encore d'évaluation
- Correction Ex1 - TD2 Cinématique FST-BM 20-21Document3 pagesCorrection Ex1 - TD2 Cinématique FST-BM 20-21Oussama SafiPas encore d'évaluation
- Formulaire Dipoles ParfaitsDocument1 pageFormulaire Dipoles ParfaitsDavid100% (1)
- 1.série N°1 de Chimie II - 1er CP - 2018-2019 ModDocument7 pages1.série N°1 de Chimie II - 1er CP - 2018-2019 ModLAICHAOUI NOURELIMANEPas encore d'évaluation
- Mounir Desité ApparenteDocument5 pagesMounir Desité ApparenteMounir Alcapone100% (3)
- 636116bfcb71b - Magazine1 ÉnoncéDocument5 pages636116bfcb71b - Magazine1 ÉnoncéAmine MohamedPas encore d'évaluation
- Chimie Des MateriauxDocument155 pagesChimie Des Materiauxbouallegue_moun180650% (2)
- M Ecanique Quantique II - Corrig e S Erie 2: 1 Delta de Dirac IDocument9 pagesM Ecanique Quantique II - Corrig e S Erie 2: 1 Delta de Dirac Iaba armelPas encore d'évaluation
- YAICHDocument187 pagesYAICHAnonymous yIQPdchHPas encore d'évaluation
- Cours DSsDocument227 pagesCours DSslouabdiaPas encore d'évaluation