Vous aimerez peut-être aussi
- Chapitre 1 Installations Electriques Phenomenes AppareillagesDocument20 pagesChapitre 1 Installations Electriques Phenomenes Appareillageszeric njtacke100% (1)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- 1 - Depart Moteur ProfDocument28 pages1 - Depart Moteur ProfdavidPas encore d'évaluation
- Moteur MonophaséDocument10 pagesMoteur MonophaséAbdelmoumenAbdelmoumen100% (1)
- CoursIndEtite1-DP - Demarrage Etoile Triangle PDFDocument7 pagesCoursIndEtite1-DP - Demarrage Etoile Triangle PDFbecemPas encore d'évaluation
- Procede de DemarrageDocument46 pagesProcede de DemarrageApollinaire SouguePas encore d'évaluation
- 06 TD Choix FusiblesDocument2 pages06 TD Choix FusiblesHØu ÇîNePas encore d'évaluation
- Demarrage Des Moteurs Prof V 2k6Document16 pagesDemarrage Des Moteurs Prof V 2k6Jamila DebayaPas encore d'évaluation
- Les Installations Electriques IndustriellesDocument3 pagesLes Installations Electriques IndustriellesRey divino MoukouaPas encore d'évaluation
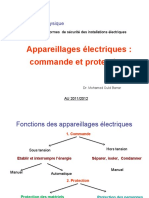
- 1FST - Appareillages ÉlectriquesDocument26 pages1FST - Appareillages ÉlectriquesSUB ZERO Elycheikh Bousseif EthmanePas encore d'évaluation
- EXEI3 07janvier2008Document2 pagesEXEI3 07janvier2008Zoghlami MohamedPas encore d'évaluation
- Demarrage Des Moteurs - V2k6Document28 pagesDemarrage Des Moteurs - V2k6Jamel Riahi100% (1)
- Guidedechoix SectionneurDocument10 pagesGuidedechoix SectionneurToky Fanambinana Ranaivoarisoa50% (2)
- Chapitre 3 - ProtectionDocument8 pagesChapitre 3 - Protectionjean marie ndengPas encore d'évaluation
- Appareillage ProtectionDocument67 pagesAppareillage ProtectionBillel Soti67% (3)
- Choix Contacteur REFDocument2 pagesChoix Contacteur REFKuate RenePas encore d'évaluation
- Identification Et Reperage Dans Un SchemaDocument8 pagesIdentification Et Reperage Dans Un Schemamajd bakerPas encore d'évaluation
- Chapitre 4 Les Procedes de FreinageDocument13 pagesChapitre 4 Les Procedes de FreinageWided Maghraoui100% (1)
- Machines ÉlectriquesDocument2 pagesMachines ÉlectriquesKalosoiretrotchgmail.com Kaloso100% (1)
- Choix Des Composants Depart MoteurDocument5 pagesChoix Des Composants Depart MoteurAmraoui100% (1)
- Aee Iii Partie 6 EtriDocument91 pagesAee Iii Partie 6 EtriIr Djolinha KinamvuidiPas encore d'évaluation
- TP Reseau ElectriqueDocument12 pagesTP Reseau ElectriqueAmine MohamedPas encore d'évaluation
- Proba F3 Electrotech 2009 PDFDocument2 pagesProba F3 Electrotech 2009 PDFmauricetappa100% (1)
- TMEL - Etude D'equipementDocument2 pagesTMEL - Etude D'equipementAina RATSIMBAZAFY100% (2)
- 04 Chapitre-1-Normalisation-Reperage-Installation-ElectriqueDocument23 pages04 Chapitre-1-Normalisation-Reperage-Installation-ElectriqueEmelisse MeledjePas encore d'évaluation
- Démarrage Classique Des MAS 3 - Rizki PDFDocument36 pagesDémarrage Classique Des MAS 3 - Rizki PDFOssama ChahoubPas encore d'évaluation
- FreinageDocument10 pagesFreinagemisssiwarPas encore d'évaluation
- 09 Principe de Fonctionnement Machine AsynchroneDocument16 pages09 Principe de Fonctionnement Machine AsynchroneTaoufiqBaouchPas encore d'évaluation
- Installations DomestiqueDocument16 pagesInstallations DomestiqueRahal EL RhaziPas encore d'évaluation
- Mainstraim Out of HereDocument11 pagesMainstraim Out of HereWil ToulousePas encore d'évaluation
- TD3 Generatrices A Courant ContinuDocument3 pagesTD3 Generatrices A Courant ContinuHajri MohamedPas encore d'évaluation
- Demarrage Des Moteurs Prof V 2k6Document16 pagesDemarrage Des Moteurs Prof V 2k6havoc2012100% (1)
- Bac GM MCCDocument20 pagesBac GM MCCHØu ÇîNe100% (1)
- Etude Composant Depart Moteur DRDocument15 pagesEtude Composant Depart Moteur DRDjamal Zenaidi100% (1)
- KALKOUL Ramzi-LAHHIT Abderrahmane-BOUGHANJA Tarik-EL IMAMI Imane - ECHOUAI HajarDocument48 pagesKALKOUL Ramzi-LAHHIT Abderrahmane-BOUGHANJA Tarik-EL IMAMI Imane - ECHOUAI HajarCHAYMAA HAMIDIPas encore d'évaluation
- Eval Fin Seance 9 Regime TTDocument3 pagesEval Fin Seance 9 Regime TTAbdoulrazakPas encore d'évaluation
- Détection Du PannesDocument10 pagesDétection Du PannesAbdoo SæmPas encore d'évaluation
- Onduleur A MLIDocument50 pagesOnduleur A MLIAbdesslam GuennouniPas encore d'évaluation
- Cours de Production-Transport-Distribution de L'energie ElectriqueDocument14 pagesCours de Production-Transport-Distribution de L'energie ElectriqueGapelbe passale100% (1)
- Cours Alimentation STSDocument6 pagesCours Alimentation STSMohamed Ali DaymiPas encore d'évaluation
- Corrigé Examen SH APP 2016 2017 N°1Document2 pagesCorrigé Examen SH APP 2016 2017 N°1Issam MobPas encore d'évaluation
- Moteur À Courant Continu 2016Document12 pagesMoteur À Courant Continu 2016basmaPas encore d'évaluation
- TD - Dimensionnement Des Installations RectifieDocument3 pagesTD - Dimensionnement Des Installations RectifieHamouda TEJ100% (1)
- Chapitre IV. Schémas Et Appareillage Partie 2 PDFDocument9 pagesChapitre IV. Schémas Et Appareillage Partie 2 PDFfarouq habchiPas encore d'évaluation
- Les Regimes de NeutreDocument30 pagesLes Regimes de NeutreRomain AndréPas encore d'évaluation
- 06 Exercice Synthese CorrigeDocument7 pages06 Exercice Synthese CorrigeCalLmeBiggzRozay100% (1)
- M108 - Interpréter Le Secteur Électrique Dans Tous Ses États Et Perspectives D'évolutionDocument69 pagesM108 - Interpréter Le Secteur Électrique Dans Tous Ses États Et Perspectives D'évolutionSami MazouzPas encore d'évaluation
- Corrige 5Document22 pagesCorrige 5loicPas encore d'évaluation
- Présenter Par CHEBAHI FATIMADocument22 pagesPrésenter Par CHEBAHI FATIMAEl Yassamine CherifPas encore d'évaluation
- Moteurs A Deux VitessesDocument7 pagesMoteurs A Deux VitessesJunior KouaboPas encore d'évaluation
- Demarrage Des MasDocument33 pagesDemarrage Des MasAbdoulaye DIALLOPas encore d'évaluation
- Exercice HybrideDocument4 pagesExercice HybrideKannan MStore100% (1)
- Moteur AsynchroneDocument18 pagesMoteur AsynchroneAnonymous 6VBmiJQ7MPas encore d'évaluation
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- L'électricité - Découvreurs et Inventeurs: Tome IID'EverandL'électricité - Découvreurs et Inventeurs: Tome IIÉvaluation : 5 sur 5 étoiles5/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Véhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud ChielensDocument22 pagesVéhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud Chielensyahiaoui adelPas encore d'évaluation
- Rà Gles à Respecter Dans La Conception Des Postes de Livraison HTABTDocument14 pagesRà Gles à Respecter Dans La Conception Des Postes de Livraison HTABTsoltaniPas encore d'évaluation
- English FrançaisDocument16 pagesEnglish FrançaisJAMAL TIPas encore d'évaluation
- Regulation de Vitesse MCCDocument10 pagesRegulation de Vitesse MCCMohamed Bou100% (1)
- TP EP SimulationDocument6 pagesTP EP SimulationAhmad WhabiPas encore d'évaluation
- Série Physique 2Sc Dipole Résistor-ConvertiDocument2 pagesSérie Physique 2Sc Dipole Résistor-Convertiamine touatiPas encore d'évaluation
- Blindage Cable FEMMDocument298 pagesBlindage Cable FEMMAbderraouf MEDJDOUBPas encore d'évaluation
- Architecture Concentrateur Doxygène ConnectéDocument1 pageArchitecture Concentrateur Doxygène Connectédhaferahmed10Pas encore d'évaluation
- CAME ZA3 NoticeDocument12 pagesCAME ZA3 NoticeNicolas BuissonPas encore d'évaluation
- TP02 - Amplis SpéciauxDocument3 pagesTP02 - Amplis SpéciauxOUIAME NKHILI0% (1)
- Notice Zelio Logic 2Document156 pagesNotice Zelio Logic 2koyabePas encore d'évaluation
- TP Simulation Numerique 2Document8 pagesTP Simulation Numerique 2cazesnoePas encore d'évaluation
- Energieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageDocument11 pagesEnergieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageAMINE AIT ABBOUPas encore d'évaluation
- Mikro CDocument5 pagesMikro CMouad MalhiPas encore d'évaluation
- Commande Électronique Des Moteurs 3Document268 pagesCommande Électronique Des Moteurs 3MaGMaaa WKPas encore d'évaluation
- MSi B550M PRO A520M PRO Carte Mère Manuel Utilisateur - Manuels +Document1 pageMSi B550M PRO A520M PRO Carte Mère Manuel Utilisateur - Manuels +lilouPas encore d'évaluation
- MV Instrument Transformers FR PDFDocument34 pagesMV Instrument Transformers FR PDFjeanPas encore d'évaluation
- CMP FinalDocument15 pagesCMP FinalAhmed KiredPas encore d'évaluation
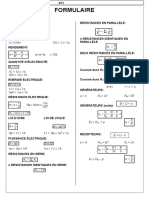
- Formulaire D ElectrotechniqueDocument4 pagesFormulaire D ElectrotechniqueralojakPas encore d'évaluation
- TH T2191 HtakhedmitDocument190 pagesTH T2191 HtakhedmitabdellahmorPas encore d'évaluation
- Chapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)Document13 pagesChapitre 2 (Influence de La Température Sur La Position Du Niveau de Fermi)MEed E-tanPas encore d'évaluation
- Sécurisation Des Personnes Régimes Du NeutreDocument4 pagesSécurisation Des Personnes Régimes Du NeutrepayfaPas encore d'évaluation
- Cour AdnanDocument217 pagesCour AdnanBoualem MestafaPas encore d'évaluation
- Protocol TP SocDocument14 pagesProtocol TP SocBani RichardPas encore d'évaluation
- Dispositif Differentiel ResiduelDocument2 pagesDispositif Differentiel ResiduelKANTE SOUMPas encore d'évaluation
- Accessoires Coffrets de RelayageDocument6 pagesAccessoires Coffrets de RelayageAhmed IdrissiPas encore d'évaluation
- 1elec - L3-S1-2022Document46 pages1elec - L3-S1-2022zerrouki hichamPas encore d'évaluation
- Fiche Technique Onduleur - SG250HXDocument2 pagesFiche Technique Onduleur - SG250HXkaltoum elmnaouarPas encore d'évaluation
- Analog FiltreDocument13 pagesAnalog FiltreMhamdi AhlemPas encore d'évaluation
- Alimentations À Découpage Convertisseurs À ResonnanceDocument336 pagesAlimentations À Découpage Convertisseurs À Resonnancesabinebach100% (2)